

Студеникин - Технические средства судовождения
.pdfСледует отдавать себе отчет в том, что полученные указанными путями оцен- ки погрешности удержания судна на заданной траектории не учитывают особенно- сти психики и квалификацию человека, стоящего у руля. Реальные ошибки могут превышать их расчетные значения.
5.2. Особенности построения измерителей угловых скоростей судна
Чаще всего ИУС строятся на базе классического двухстепенного гироскопа с “электрической пружиной”, однако в последнее время все большее внимание при- влекают к себе вибрационные и оптические приборы, построенные на базе новых современных технологий [3].
Примером ИУС, использующего классическую модель ГТ, является отечествен- ный прибор “Галс”, выпускаемый Заводом Точной Механики г. Екатеренбург. Со- став комплекта названного изделия представлен на рис. 5.1, на котором цифрой 1 обозначены два аналоговых указателя угловой скорости (репитера), цифрой 2 – при- бор управления и фильтрации, цифрой 3 – основной прибор и цифрой 4 – цифровой
репитер. По желанию заказчика
комплектация изделия может быть изменена.
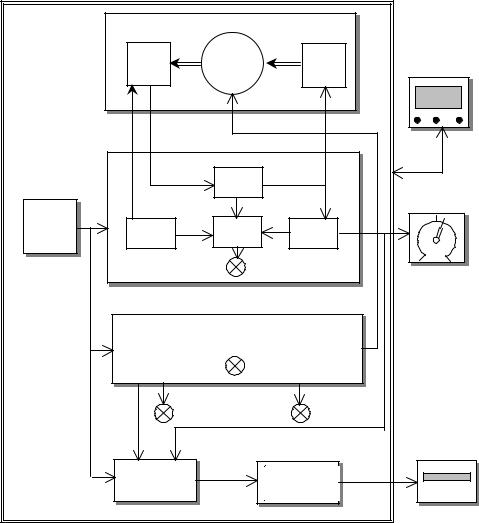
Основной прибор предназначен для формирования электрических сигналов, пропорциональных угло- вой скорости поворота судна, и
Рис. 5.1 выдачи этих сигналов на репитеры и другим потребителям. Его состав и связь с приборами комплекта показаны на рис. 5.2. Он включает в себя гиро-
секцию и электронные платы, осуществляющие питание гироскопа и преобразо- вание его сигналов.
Гиросекция, в основе которой лежит двухстепенной классический гиротахометр с электрической обратной связью [3], является главным функциональным узлом прибора, непосредственно измеряющим интересующую нас скорость. Углы пре- цессии гироскопа, обусловленные вращением его основания, ограничены упорами и, как правило, не превышают ±1,50 [2]. Прибор рекомендуется устанавливать та- ким образом, чтобы главная ось гироскопа была параллельной диаметральной плоскости судна, что позволит снизить влияние качки судна на его показания.
Питание гироскопа осуществляется стабилизированным по частоте трехфазным напряжением, сформированным платой ППГ питания гиромотора. Использование
наряду с этим для привода ротора гироскопа синхронного двигателя позволяет |
||||
Основной |
Г |
|
|
Прибор |
прибор |
|
|
|
|
|
ГМ |
|
управления |
|
|
ДУ |
ДМ |
||
|
|
|||
|
|
УПС |
|
|
|
|
У |
|
Аналоговый |
|
|
|
|
репитер |
БП |
Г |
Н |
ПС |
|
|
|
|||
|
|
|
Неиспр. |
|
|
ППГ |
Неиспр. |
|
|
|
|
|
||
|
|
Неиспр. 1 |
Неиспр. 2 |
Цифровой |
|
|
|
|
|
|
|
|
|
репитер |
|
ПНК |
ПНКС |
|
|
Рис. 5.2 |
|
|
|
|
получить стабильное значение его кинетического момента и, как следствие, ко- |
||||
эффициента передачи гиротахометра. |
|
|||
Плата УПС управления и сигнализации включает в себя:
∙усилитель У обратной связи, образующий совместно с датчиком угла ДУ и датчиком момента ДМ “электрическую пружину”;
∙преобразователь ПС сигнала гироскопа к виду, удобному для отображения аналоговыми репитерами;
∙генератор Г, осуществляющий питание обмоток возбуждения датчика угла
ДУ;
∙схему формирования сигнала “Неиспр.” о наличии неисправности платы (сле- дует отметить, что и остальные платы основного прибора имеют аналогич- ную сигнализацию).
Сцелью обеспечения возможности индикации значения измеренной скорости в цифровом виде в прибор включены платы ПНК преобразователя напряжение - код и
связи С. Первая плата осуществляет преобразование выходного сигнала платы УПС в двоичный число-импульсный 12 разрядный код, который затем преобразуется платой С в 14-разрядный двоично-десятичный код, являющийся входным сигналом цифрового репитера.
Основной прибор имеет схему обобщенного контроля наличия неисправности, которая связана с лампочками “Неиспр.1” и “Неиспр.2”. Первая лампочка включает- ся тогда, когда возможность получения информации об угловой скорости судна от- сутствует полностью. При этом схема посылает информацию о неисправности всем внешним ее потребителям. Вторая лампочка свидетельствует о потере информации только для отдельных потребителей, например, для цифрового индикатора скорости.
Аналоговый репитер имеет круглую незамкнутую шкалу, которая оцифровыва- ется в соответствие с измеряемым диапазоном угловой скорости. Весь диапазон раз- бивается на три поддиапазона. Переключение поддиапазонов производится автома- тически по сигналам, поступающим с основного прибора. Для исключения частого переключения диапазонов в районе их граничных значений в схему введена задерж- ка, длительностью 220 с.
Яркость ламп шкального устройства автоматически регулируется фоторезисто- ром. Начальная яркость устанавливается вручную.
Контроль работоспособности осуществляется по сигналу рассогласования сле- дящей системы, осуществляющей поворот стрелки репитера.
Цифровой индикатор угловой скорости является пятиразрядным, причем один из разрядов используется для указания знака угловой скорости. Индикатор имеет регу- лировку яркости, аналогичную используемой в аналоговом репитере.
Прибор управления и сигнализации устанавливается в рулевой рубке и с него осу- ществляется включение ИУС и выбор постоянной времени фильтрации.
Основные технические характеристики ИУС “Галс”:
Диапазон измеряемой угловой скорости (0/мин)…………………….. |
0,25÷108 |
Погрешность измерения (%)………………………………………………….. |
2,5 |
Время готовности (мин)…………………………………………………………. |
4 |
Ресурс (час)…………………………………………………………………………… |
60 000 |
Срок службы (лет)…………………………………………………………………. |
12 |
Электропитание (В/Гц)…………………………………………………………… |
220/50 |
Потребляемая мощность (ВА)………………………………………………… |
50 |
Масса основного прибора (кг)……………………………………………….. |
18 |
Габариты основного прибора (мм)…………………………………………. |
284х317х322 |
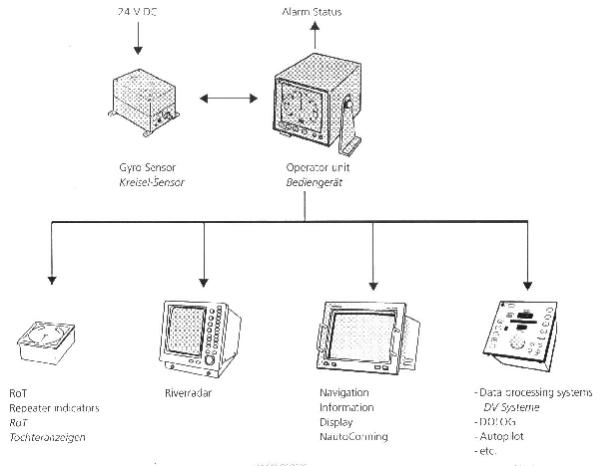
Приборы, аналогичные рассмотренному, выпускаются и за рубежом. В качестве примера на рис. 5.3 показан комплект ИУС немецкой фирмы Raytheon [5], пред- назначенный для использования как на морских, так и на речных судах. В ком- плект входят гироскопический блок (Gyro Sensor) и пульт оператора (Operator unit). Информация снимаемая с прибора может поступать на дополнительные ре- питеры (RoT Repeater indicator), радар (Riverradar), интегральный навигационный дисплей (Navigation information Display) и другие системы.
ИУС имеет чувствительность 0,1 0/мин, и позволяет измерять угловые скорости в диапазоне ± 300 0/мин. Шкала аналогового репитера отображает информацию в поддиапазонах 30, 50, 100, 180 и 300 0/мин. В зависимости от условий плавания постоянная прибора может устанавливаться равной 0, 3, 5 или 10 с. Прибор пита- ется напряжением 24 В постоянного тока. Вес базового комплекта составляет 5,8 кг.
Ранее] отмечалось, что на смену механическому гиротахометру приходят инерци- альные датчики, основанные на новых принципах. Большинство из этих датчиков могут быть использованы для построения ИУС. На сегодняшний день чаще всего
Рис. 5.3
для этих целей используются оптические гироскопы. Они обладают высокой чув- ствительностью, долговечностью, устойчивостью против механических воздейст- вий, широким диапазоном измеряемых скоростей, высокой степенью линейности
характеристики и рядом других преимуществ. Примером морского ИУС, постро- енного на гироскопах указанного типа является изделие “Naviturn II” фирмы “Litton”. Другие, известные автору изделия рассматриваемого типа, рассчитаны на использование на борту высокоманевренных объектов. К ним можно отнести из- мерители “ДУС-500” и “ДУС-700” Пермской Научно-производственной Прибо- ростроительной Компании. Технические параметры названных приборов приве- дены в таблице 5.1.
Таблица 5.1
Основные технические характеристики оптических ДУС
Наименование параметра |
ДУС- |
ДУС- |
|
500 |
700 |
|
|
|
Количество измерительных осей |
1 |
3 |
|
|
|
Диапазон измеряемых угловых скоростей (0/с) |
±500 |
±700 |
|
|
|
Дрейф нулевого сигнала (0/час) |
0,03 |
1 |
|
|
|
Нелинейность выходного сигнала (%) |
0,01 |
0,05 |
|
|
|
Нестабильность масштабного коэффициента |
0,01 |
0,05 |
(%) |
|
|
|
|
|
Порог чувствительности (0/час) |
0,02 |
1 |
|
|
|
Напряжение питания (В) |
27 |
|
|
|
|
Потребляемая мощность (Вт) |
15 |
10 |
|
|
|
Масса (кг) |
1,5 |
1 |
|
|
|
Выходной сигнал рассматриваемых датчиков формируется в цифровом формате
RS 232.
Разрабатываются датчики для измерения угловых скоростей на базе твердотель- ных гироскопов. Примером такого датчика может служить изделие RRS75, соз-
данное Inertial Science, Inc. и Sandia National Laboratory, однако оно рассчитано на использование на маневренных объектах.
Имеются также образцы ИУС, использующие динамически настраиваемые гиро- скопы.
ЛИТЕРАТУРА К РАЗДЕЛУ
1.Богданович М.М. Применение гироскопических приборов и систем на морских судах. – М.: Транспорт, 1977. – 261 с.
2.Горохов И.В., Утенков А.М. Навигационные гиротахометры и их применение в судовождении. – М.: В/О “Мортехинформреклама”, 1987. – 28 с.
3.Студеникин А.И. Основы работы гироскопических и интегрированных систем ориентации и навигации. Часть 1. – РИО НГМА, 2002.
4.Утенков А.М., Барский С.О. Экспериментальное исследование нового датчика угловой скорости поворота судна, сб. Технические средства и методы судовож-
дения. – Л.: Транспорт, 1983. – 39 – 42 с.
5.Rate-of-Turn Indicator Equipment “Raytheon”. http://www.raymarine.com

ЗАКЛЮЧЕНИЕ
Использование последних достижений в области приборостроения и внедрение интеллектуальных систем способствуют созданию изделий, для эксплуатации кото- рых от судоводителей требуются минимальные усилия. Может создаться впечатле- ние, что приборы настолько совершенны, а их погрешности настолько малы, что нет смысла контролировать условия их работы и оценивать достоверность их показа- ний. Нередко к этим соображениям нас подталкивают рекламные проспекты изде- лий, в которых декларируются не всегда имеющие место на практике достоинства.
Мудрость судоводителя заключается в компетентной оценке реальных возможностей изделий в реальных условиях эксплуатации, основанной на глубоком понимании принципов, заложенных в основу их работы.
А для этого нужны усилия при изучении данного курса. Хочется верить, что вы их не пожалеете. Я же со своей стороны желаю вам успехов.
А. Студеникин.