

Студеникин - Технические средства судовождения
.pdftgδv = |
ω1 |
= − |
vN |
. |
(4.2) |
|
ωxo + ω3 |
R3Ω3 cosϕ + vE |
|||||
|
|
|
|
Совместившись с направлением вектора ωΣ, который определяет положение компасного меридиана, главная ось гироскопа окажется повернутой относитель- но направления на север (истинного меридиана) на величину, определяемую ра- венством (4.2).
Проведенный анализ показывает, что
§скоростная девиация является методической ошибкой гирокомпаса и про- являет себя в гирокомпасах любого типа;
§значение скоростной девиации не зависит от параметров гирокомпаса, а оп- ределяется только скоростью движения судна, его курсом и широтой места, в котором оно находится;
§при одних и тех же параметрах движения судна скоростная девиация рас- тет с увеличением широты его места и может достигать значительных ве- личин в высоких широтах;
§если судно идет курсом 900 или 2700, скоростная девиация компаса равна нулю;
§в общем случае скоростная девиация должна или учитываться в процессе
плавания, или компенсироваться.
На практике используются два принципиально различных способа компенса- ции скоростной девиации. В первом, главная ось ГК оставляется в плоскости компасного меридиана, а в показания датчиков информации (репитеров) вносятся соответствующие поправки. Во втором, гироскоп принудительно приводится в истинный меридиан, в результате чего отпадает необходимость введения попра- вок в показания репитеров.
4.3.Виды гироскопических компасов
Внастоящее время разработано и выпускается большое количество ГК, разли- чающихся устройством чувствительного элемента (ЧЭ), способом его коррекции, техническими параметрами, конструктивным исполнением, устройством систем трансляции информации о курсе судна, степенью автоматизации управления ра- ботой компаса. Однако многие образцы компасов имеют довольно схожие в своей основе структуры, что позволяет объединить их в группы по степени близости пе- речисленных выше параметров.
Вобщем случае все широко распространенные судовые ГК разделяют на две большие группы. Первую составляют изделия, построенные на автономном ЧЭ.
Указанный ЧЭ обычно включает в себя один или два гироскопа, имеет понижен- ный центр массы или сам образует маятник, в результате чего его главная ось стремиться установиться в плоскость меридиана, а также имеет устройство для успокоения прецессионных колебаний. Автономность ЧЭ заключается в том, что
он автоматически ориентируется в пространстве и в рабочем режиме практически отсутствует возможность программного управления его положением.
Вторую группу составляют корректируемые ГК. Эти ГК имеют астатический (уравновешенный) ЧЭ, маятниковая коррекция заменяется электромеханической системой коррекции, которая не только устанавливает ЧЭ в меридиан, но и позво- ляет осуществлять программное управление его движением. Такие ГК строятся, как правило, на базе трехстепенных поплавковых или динамически настраивае- мых гироскопов.
К этим двум группам можно добавить зарождающееся в настоящее время на- правление, предусматривающее разработку гирокомпасов, не использующих ЧЭ, устанавливающиеся в меридиан. Инерциальные датчики информации этих компасов жестко связываются с основанием изделия, а положение текущего меридиана рас- считывается по их сигналам с использованием специальных алгоритмов. Такие ГК получили название аналитических. Отличительной особенностью таких гироком- пасов является то, что благодаря использованию малогабаритных инерциальных датчиков и совершенных алгоритмов обработки информации с применением совре-
менной вычислительной техники обеспечивается возможность повышения точности определения курса, примерно, в 5—10 раз от достигнутого уровня [9], что позволит удовлетворить широкий спектр требований по его применению. Наряду с этим раз- работка новой технологии аналитической вертикализации ГК исключает необходи- мость геометрической выставки чувствительного элемента в плоскость горизонта, что существенно упрощает его конструкцию, снижает стоимость изделия и расши- ряет область использования, делая возможным определение курса при произвольной пространственной ориентации судна. Ожидаемая погрешность определения курса не должна превышать 5 угл. мин, а вес чувствительного элемента будет менее 3 кг [9].
4.4. Гирокомпасы с автономным чувствительным элементом
Большинство современных компасов с автономным чувствительным элементом построены на базе двухгироскопной гиросферы ГС [11,14], в которой наряду с гиро- скопами расположены гидравлический успокоитель прецессионных колебаний ги- росферы и, возможно, элементы, обеспечивающие ее центрирование относительно резервуара с жидкостью, в который она помещается. Этот резервуар получил назва-
ние следящей сферы.

Векторы Н1 и Н2 (рис. 4.4) кинетических моментов гироскопов равны между со- |
|||||
|
х |
|
бой и, как правило, развернуты относительно оси |
||
а) |
|
ох на угол, равный ε=45 градусам. Сами гироско- |
|||
|
|
||||
|
Н1х |
Н1 |
пы связаны между собой шарнирным механизмом |
||
|
(спарником) типа антипараллелограм или анало- |
||||
|
Пр |
|
|||
|
Н1у |
гичным по свойствам |
зубчатым зацеплением, |
||
Н2х |
|
обеспечивающим возможность совместного по- |
|||
|
Г1 |
ворота гироскопов вокруг их оси подвеса только |
|||
Н2 |
0 |
у |
|||
на равные углы и только в противоположные сто- |
|||||
|
Пр |
ГС |
роны. Спарник связан с помощью пружин с кор- |
||
Н2у |
пусом гиросферы, в результате чего после исчез- |
||||
Г2 |
|
||||
|
|
новения возмущающих воздействий, вызвавших |
|||
|
|
|
|||
Рис. 4.4 |
|
|
отклонение гироскопов, |
они возвращаются в ис- |
|
|
|
ходное положение. |
|
||
|
|
|
|
||
мента гиросферы равен |
Результирующий вектор кинетического мо- |
||||
|
|
||||
|
Нг |
= 2Н cosε ≈ 1,4H. |
(4.3) |
||
что спарник С обеспечивает постоянство направления Нг относительно осей гиросферы при любом текущем значении угла ε.
Известо [15], что поведение гиросферы под действием внешних моментов , относительно осей, не совпадающих с ее главной осью (по которой направ- лен вектор Нг), аналогично поведению трехстепенного гироскопа с кинетиче- ским моментом, равным Нг.
Это обстоятельство обеспечивает высокий уровень стабильности положения ги-
росферы при воздействии моментов внешних сил относительно указанных осей и позволяет при изучении движения главной оси чувствительного элемента ГК в пер- вом приближении рассматривать гиросферу как одногироскопную.
В том случае, когда относительно оси ох (рис. 4.5) действует внешний момент Мх, гироскопы, стремясь совместить
б) |
|
х |
|
|
|
|
|
|
|
|
главные оси с направлением вектора |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
момента внешней силы, будут пово- |
||
|
Мх |
|
|
|
|
|
|
|
|
|
|
Н1 |
|
|
|
|
|
|
|
|
рачиваться относительно гиросферы |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вокруг своих осей подвеса. На ри- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сунке направление поворота осей |
||
Н2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гироскопа указано стрелками. Это |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
1 |
|
|
|
|
|
|
вызовет изменение угла ε. |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
Из-за наличия угловой скорости |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε прецессии гироскопов возникнут |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гироскопические |
моменты |
Мг1 и |
Мг2 |
|
Мгх |
|
|
|
|
|
|
|
|
Мг2,геометрическая сумма которых |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
определит результирующий момент |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гироскопической |
реакции гиросфе- |
|
Рис. 4.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ры Мгх, направленный по оси ох в |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сторону, противоположную |
внеш- |
|
нему моменту. В результате внешний момент будет скомпенсирован моментом ги- роскопической реакции и гиросфера останется практически неподвижной. Это об-
стоятельство значительно повышает устойчивость рассматриваемой гиросферы при воздействии на нее моментов внешних сил, приложенных относительно оси ох. Так, надлежащим выбором жесткости пружин, связывающих спарник с корпусом гиро- сферы, удается период ее собственных колебаний вокруг оси ох повысить с не- скольких секунд, характерных для одногироскопного чувствительного элемента, до
10 - 20 минут, благодаря чему она практически не реагирует на воздействия, порождаемые качкой судна.
Для обеспечения высокой точности показаний ГК необходимо его ЧЭ подве- сить таким образом, чтобы в процессе работы уровень возмущающих моментов, приложенных к нему, был бы минимальным. Одновременно необходимо позабо- титься о том, чтобы система, обеспечивающая съем информации о курсе судна, практически не влияла на ориентацию гиросферы. Достаточно полно указанным
требованиям удовлетворяет гидравлический подвес гиросферы с использованием отслеживания ее азимутального положения специальной следящей сферой, с кото- рой связывают датчики информации и другие устройства, обеспечивающие работу гирокомпаса. Описание типовых схем подвеса гиросферы можно найти, например, в работе [15].
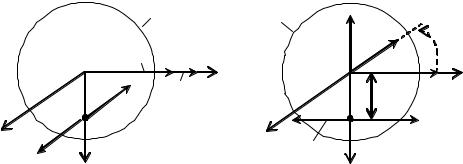
При маневрировании судна наряду с рассмотренной ранее скоростной девиацией возникают дополнительные погрешности определения направления географическо- го меридиана, которые обусловлены следующим.
Совершая маневр, судно может менять скорость, курс или то и другое вместе. Любой из указанных маневров приводит к изменению вектора его линейной скоро-
сти движения с некоторым ускорением v& , которое будем представлять в виде со- ставляющих v&N и v&E (рис. 4.6) по осям горизонтальной системы координат 0NEn.
При наличии указанных ускорений на чувствительный элемент ГК действуют мо- менты сил инерции, которые заставляют его отклоняться от плоскости меридиана.
Эти моменты обусловлены, прежде всего, наличием смещения центра масс гиро- сферы относительно ее центра подвеса (метацентра). Степень их влияния на ошибку
а) |
ГС |
б) ГС |
α& |
М2 |
|
0 |
H |
|
0 |
|
H |
ц.м. |
M1 N |
|
ц.м. |
l |
N |
|
|
||||
f1 |
|
|
|
||
E |
n |
E |
f2 |
n |
v&N |
v&E |
|
|
|
||
|
|
|
|
|
Рис. 4.6
ГК зависит от направления ускорения. Так, если судно движется с ускорением v&E ,
то к центру масс ц.м. (рис. 4.6 а) гиросферы ГС будет приложена сила инерции f1, которая порождает момент М1. Вектор этого момента оказывается коллинеарным
вектору кинетического момента Н гиросферы и поэтому практически не вызывает отклонения ее оси от плоскости меридиана. Не следует думать, что этот момент не оказывает вообще никакого влияния на движение гиросферы. Он порождает движе- ние гироскопов, расположенных внутри гиросферы, и ее прецессию вокруг главной оси. Но в данный момент нас интересует оценка степени влияния рассматриваемого фактора на положение главной оси гиросферы. И здесь, как мы уже установили, это влияние в первом приближении отсутствует.
Устойчивое положение главной оси гиросферы соответствует направлению ком- пасного меридиана, который повернут относительно истинного на угол, определяе- мый скоростной девиацией. Поэтому погрешность оценки курса судна будет зави- сеть не только от отклонения оси гиросферы под действием моментов сил инерции, но и от изменения величины скоростной девиации. В связи с тем, что восточная составляющая скорости судна не влияет на положение компасного меридиа- на, рассматриваемое ускорение v&E в первом приближении не будет оказы-
вать влияния и на погрешность измерения курса судна.
Если судно движется с ускорением v&N (рис. 4.6 б), сила инерции, приложенная к
центру масс гиросферы, будет направлена к югу, а вектор момента этой силы М2 – на запад. В соответствии с правилами прецессии под действием момента М2, гиро- сфера начнет поворачиваться с угловой скоростью α& в направлении, показанном штриховой стрелкой. За время маневра и гиросфера и компасный меридиан откло- нятся от начального положения на какие-то углы. Разность этих углов отклонения и определит ошибку измерения курса судна, возникающую из-за наличия ускорения
v&N . Эта ошибка получила название инерционной девиации первого рода.
В свою очередь, ошибка определения курса, возникающая при маневрировании судна за счет влияния сил инерции на гидравлический успокоитель колебаний гиро- сферы, получила название инерционной девиации второго рода. Как и в предыду- щем случае, основное влияние на эту девиацию оказывают силы инерции, лежащие в плоскости меридиана. Они вызывают перетекание жидкости из северной емкости успокоителя в южную или наоборот. При этом в одной из емкостей оказывается жидкости больше, чем в другой, что приводит к возникновению момента силы тя- жести относительно оси 0Е, в результате чего и возникает прецессия гиросферы.
Основные особенности инерционной девиации первого рода сводятся к следую- щему:
§инерционная девиация имеет место всегда, когда судно маневрирует не в расчетной широте (в которой ее значение практически равно нулю);
§максимальное значение девиация достигает в конце маневра после чего, изменяясь по гармоническому закону, постепенно затухает;
§максимальное значение девиации пропорционально разности скоростей в начале и конце маневра и растет с удалением от расчетной широты;
§инерционные девиации в широтах, разнесенных относительно расчетной, имеют разные знаки.
В отличие от инерционной девиации первого рода, достигающей своего макси- мума в конце маневра, девиация второго рода максимальна спустя, примерно, чет- верть периода после окончания маневра.
Для устранения инерционной девиации второго рода можно на время маневра отключать затухание, перекрывая возможность перетекания жидкости из сосуда в сосуд, однако это, как правило, не используется на практике.
В двухгироскопных компасах, снабженных гидравлическим успокоителем коле- баний, обе рассмотренные девиации существуют одновременно, складываясь в об- щую суммарную инерционную девиацию. Величина этой девиации зависит от па- раметров ГК, широты места судна, значения расчетной широты и параметров ма- невра. Аналитические зависимости, описывающие закон изменения рассматривае- мой девиации достаточно громоздки и практически неприемлемы для оценки ее те- кущего значения вахтенным помощником капитана без привлечения вычислитель- ной техники и информации о параметрах маневра. Однако ему необходимо иметь представление об особенностях проявления указанной девиации и, если в ГК отсут- ствуют устройства для ее компенсации, уметь снизить ее негативное влияние до ми- нимума.
Основные особенности суммарной инерционной девиации сводятся к следую-
щему [12]:
∙Значение первого максимума девиации сильно зависит от широты места манев- ра. Указанное значение уменьшается по мере приближения широты места судна к расчетной. В расчетной широте девиация меняет свой знак и в сильной степени возрастает в широтах, которые выше расчетной;
∙До расчетной широты значение первого максимума девиации в значительной степени зависит от продолжительности маневра.Чем маневр длительнее, тем меньше значение первого максимума. В диапазоне широт, лежащих выше рас- четной, значение первого максимума девиации практически не зависит от про- должительности маневра;
∙Нарастание значения девиации в течение времени маневра происходит практи- чески по линейному закону.
∙Значение второго максимума девиации в любой широте места маневра практиче- ски не зависит от его длительности.
∙При повторных маневрах девиация возрастает до определенной величины и в дальнейшем ее рост прекращается.
В последние годы значительное внимание специалистов было уделено вопросам устранения инерционной девиации, благодаря чему были найдены достаточно эф- фективные пути решения указанной задачи. Эти пути предусматривали использова-
ние в структуре компаса электронной модели, воспроизводящей закон изменения указанной девиации. [14].
При наличии периодической качки судна возникают постоянные по характеру ошибки гирокомпасов, однако при использовании двухгироскопной гиросферы эти ошибки пренебрежимо малы [13].
4.5. Гирокомпасы с корректируемым чувствительным элементом
Двухгироскопные компасы, сочетая в себе такие качества, как относительно низ- кая стоимость изделий и высокая надежность, имеют один существенный недос- таток, заключающийся в отсутствии возможности коррекции параметров движе-
|
|
|
|
|
ния и положения гиросферы. От |
||
z |
|
|
|
|
этого недостатка свободны рас- |
||
|
|
|
|
сматриваемые гирокомпасы, по- |
|||
|
|
|
|
|
|||
|
|
|
UA |
Уу |
скольку здесь оператор |
имеет |
|
|
о |
A |
возможность прикладывать спе- |
||||
|
|
|
|||||
|
|
|
|
Uyy |
циально |
сформированные |
|
х |
|
|
ДМy |
|
управляющие |
моменты |
непо- |
|
|
|
средственно к его чувствитель- |
||||
|
|
|
Uy |
у |
|||
|
|
Uky |
ному элементу. Указанная воз- |
||||
ДК |
|
|
|
можность сделала приборы рас- |
|||
ДМz |
|
Cy |
|
сматриваемого типа весьма пер- |
|||
|
|
Уz |
|||||
|
|
Uyz |
спективными, |
открывающими |
|||
Ukz |
Uz |
|
|
дорогу для интенсивного ис- |
|||
|
|
|
|
||||
Рис. 4.7 |
Cz |
|
|
|
пользования |
новейших |
дости- |
|
|
|
|
|
жений электроники и вычисли- |
||
тельной техники с целью наиболее полного удовлетворения требований практики.
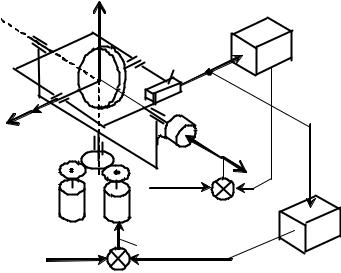
Простейшая схема гирокомпаса с корректируемым чувствительным элементом представлена на рис. 4.7. В его основе лежит астатический гироскоп с тремя сте- пенями свободы. Для того чтобы этот гироскоп приобрел способность устанавли- ваться в меридиан, он должен быть снабжен устройством, которое воздействовало бы на него так же, как воздействует на гиросферу двухгироскопного компаса ее маятниковость. Иными словами, при отклонении главной оси ох гироскопа от
плоскости горизонта относительно оси оу внутренней рамки карданова подвеса должен создаваться момент, пропорциональный этому углу отклонения.
Указанная задача решается контуром коррекции, включающим в себя акселе- рометр А, усилитель Уу, сумматор Су и датчик моментов ДМу. При отсутствии ма- неврирования судна, выходной сигнал акселерометра будет пропорциональным проекции ускорения силы тяжести Земли на направление его оси чувствительно-
сти. В силу того, что он устанавливается на внутренней рамке карданова подвеса таким образом, чтобы эта ось была параллельна главной оси гироскопа, выход-
ной сигнал акселерометра будет пропорционален углу отклонения плоскости рамки, а, следовательно, и главной оси гироскопа от плоскости горизонта. В силу указанных обстоятельств этот прибор часто называют индикатором горизонта.
Сигнал акселерометра после усиления в усилителе Уу поступает на датчик мо- ментов ДМу, который прикладывает к гироскопу момент, пропорциональный на- пряжению, поступившему на него, которое, в свою очередь, пропорционально указанному выше углу отклонения главной оси гироскопа. Таким образом, созда- ется модель физического маятника, присутствующего в двухгироскопном компа- се.
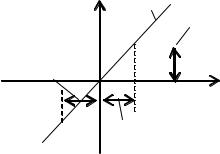
Следует отметить, что указанный способ создания маятникового момента об- ладает, как минимум, двумя существенными преимуществами перед физическим маятником. Так, при наличии ускорений, обусловленных качкой судна и его ма- неврированием, их влияние на работу гирокомпа-
|
|
Му |
1 |
2 |
|
са с неуравновешенным чувствительным элемен- |
|
|
|
|
|
|
|
том пропорционально той силе инерции, прило- |
|
|
|
|
|
|
|
|
|
|
jл=βтg |
|
|
Мут |
женной к его центру массы, которую они порож- |
||
|
|
|
|||||
|
|
|
|||||
|
|
|
|||||
|
|
|
|||||
|
|
|
j дают. В результате имеет место практически ли- |
||||
|
|
|
|||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нейная зависимость 1 (рис. 4.8) между моментами |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jл=βтg |
|
|
||
|
|
|
|
|
сил инерции, приложенными к гироскопу, и ука- |
||
Рис. 4.8 |
|
|
|
|
занными ускорениями. При использовании аксе- |
||
|
|
|
|
|
|
|
лерометра, имеющего характеристику 2, которая |
линейна только в диапазоне относительно небольших значений ускорений, соиз- меримых с величиной βm - максимально возможное отклонение глав-
ной оси гироскопа от плоскости горизонта, g – ускорение силы тяжести, степень влияния вредных ускорений будет существенно снижена.
Второе преимущество указанной системы коррекции состоит в том, что на время маневра судна, когда влияние вредных ускорений достаточно ощутимо, особенно если речь идет о высокоскоростных судах, имеется возможность полного отклю- чения коррекции.
Для обеспечения демпфирования прецессионных колебаний гироскопа в про- цессе его установления в меридиан имеется второй контур коррекции, включаю- щий в себя акселерометр А, усилитель Уz, датчик моментов ДМz. Этот контур соз- дает относительно оси оz наружной рамки подвеса момент, пропорциональный углу отклонения главной оси от плоскости горизонта. Приложенный момент вы- зывает прецессию оси гироскопа в сторону плоскости горизонта, в результате че- го и обеспечивается требуемое затухание.
Наряду с указанным выше, рассматриваемая схема гирокомпаса допускает создание внешних корректирующих сигналов Uky и Ukz, которые используются для устранения систематических ошибок гирокомпаса как методических, так и инструментальных.
Съем информации о курсе судна осуществляется датчиком курса ДК.
Следует отметить, что приведенная схема корректируемого гирокомпаса являет- ся предельно упрощенной, но позволяющей корректно выявить основные его свой- ства.
Как и ранее, для выяснения основных свойств гирокомпаса рассматриваемого типа составим уравнения, описывающие движение его чувствительного элемента. Для этого обратимся к зависимостям, описывающим поведение гироскопа с тремя
степенями свободы на подвижном основании при воздействии на него внешних возмущающих моментов Мх и Му. Учитывая незначительное влияние нутационных колебаний на работу гирокомпаса, опустим из рассмотрения первые слагаемые этих зависимостей, определяющие указанные колебания. В результате названные выра- жения примут вид:
Нα& + Н (ωzo + βωxo ) = M y , |
(4.4) |
& |
|
Hβ + H (ω yo −αωxo )= M z . |
|
Подставим в эти уравнения выражения, определяющие угловые скорости движе- ния основания гирокомпаса. В результате получим:
|
æ |
|
|
|
vE |
ö |
|
æ |
|
|
|
vE |
ö |
|
|
|
||
Нα& + Нβ çW |
|
cosϕ + |
÷ |
= H çW |
sinϕ + |
tgϕ ÷ |
+ M |
|
, |
|||||||||
|
R |
R |
|
|||||||||||||||
|
ç |
3 |
|
|
÷ |
|
ç |
3 |
|
÷ |
|
y |
|
|||||
|
è |
|
|
|
3 |
|
ø |
|
è |
|
|
3 |
ø |
|
|
(4.5) |
||
|
æ |
|
|
|
vE |
|
ö |
|
|
vN |
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ç |
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|||
Hβ - HαçW3 cosϕ + |
|
R |
|
÷ |
= H |
|
R |
|
+ M z . |
|
|
|
|
|||||
|
è |
|
|
|
3 |
|
ø |
|
3 |
|
|
|
|
|
|
|
|
|
Если считать гироскоп с технологической точки зрения идеальным, т.е. не имеющим инструментальных погрешностей, то моменты Мх и Му будут создаваться только датчиками моментов ДМу и ДМz. Величина этих моментов пропорциональна напряжениям, поступающим на них, а знак выбирается таким, чтобы движение ги- роскопа было устойчивым. Учитывая это можно записать:

М у = −kдуU y = −kду (U yy +Uky ), |
(4.6) |
|
M z = -kдzUz = -kдz (U yz +Ukz ), |
||
|
где Uy и Uz – напряжения, поступающие на статорные обмотки датчиков моментов; Uyy и Uyz – выходные напряжения усилителей Уу и Уz, соответственно; Uky и Ukz – сигналы коррекции гироскопа, формируемые внешними системами коррекции с це- лью компенсации систематических ошибок прибора.
Учитывая, что
U yy = kyU A, U yz = kzU A, |
(4.7) |
где ky и kz – коэффициенты усиления усилителей Уу и Уz, а UA – выходное напряже- ние акселерометра, выражения (4.6) перепишем в виде:
М у = −kдуkyU A − kдyUky ,
(4.8)
M z = -kдzkzU A - kдzUkz .
Подставляя равенства (4.8) в уравнения (4.5), найдем:
|
æ |
|
|
vE |
ö |
|
|
|
|
æ |
|
vE |
ö |
||
Нα& +НβçW cosϕ + |
÷ |
+k |
(k U |
+U |
)= HçW sinϕ + |
tgϕ÷, |
|||||||||
R |
R |
||||||||||||||
|
ç |
3 |
|
÷ |
ду y A |
ky |
|
ç |
3 |
÷ |
|||||
|
è |
|
|
3 |
ø |
|
|
|
|
è |
|
3 |
ø |
||
& |
æ |
|
|
vE ö |
|
(k U |
|
)= H |
|
vN |
|
|
|
||
Hβ -HαçW cosϕ + |
|
R |
÷ |
+k |
+U |
|
R |
. |
|
|
|||||
|
ç |
3 |
|
÷ |
дz |
z A |
kz |
|
|
|
|
|
|||
|
è |
|
|
3 |
ø |
|
|
|
|
3 |
|
|
|
||
На практике всегда выполняется неравенство |
|
||
æ |
vE |
ö |
|
ç |
÷ |
||
R |
|||
kдykyU A >> Нβ çW3 cosϕ + |
÷ . |
||
è |
3 |
ø |
|
Это позволяет последние уравнения переписать в более простой форме:
æ |
vE |
ö |
|
|
ç |
÷ |
- |
||
|
||||
Нα& + kду kyU A = H çW3 sinϕ + |
R3 |
tgϕ ÷ |
||
è |
ø |
|
& |
æ |
vE |
ö |
|
|
ç |
÷ |
+ kдz kzU A = H |
|||
R |
|||||
Hβ - HαçW3 cosϕ + |
÷ |
||||
|
è |
3 |
ø |
|
|
kдyUky ,
vN - kдzUkz .
R3
(4.9)
(4.10)
(4.11)