

§ 7. Собственные числа и собственные векторы линейного оператора
Пусть V – векторное пространство над полем F, : V V – линейный оператор. Элемент F называется собственным числом (или значением) линейного оператора , если существует такой ненулевой вектор v V, что (v) = v. При этом вектор v V \ {0} с вышеуказанным свойством называют собственным вектором линейного оператора , соответствующим (или отвечающим) собственному значению .
Нетрудно видеть, что любой собственный вектор v порождает одномерное -инвариантное подпространство W = L(v): (v) = (v) = v W. С другой стороны, если W – одномерное -инвариантное подпространство и v W \ {0}, то W = L(v) и (v) = v для некоторого F, т.е. v – собственный вектор для . Таким образом, изучение собственных векторов линейного оператора эквивалентно изучению его одномерных инвариантных подпространств.
С понятиями собственного числа и собственного вектора линейного оператора тесно связаны аналогичные понятия для матриц. Пусть A – квадратная (nn)-матрица над полем F. Элемент F называется собственным числом (или значением) матрицы А, если существует такой вектор v nF \ {0}, что Av = v. При этом ненулевой вектор v с вышеуказанным свойством называют собственным вектором матрицы А, соответствующим (или отвечающим) собственному значению .
Множество всех собственных чисел линейного оператора : V V (или матрицы A M(n, F)) называют спектром линейного оператора (или матрицы A) и обозначают через Sp() (или Sp(A)). Задачу отыскания всех собственных чисел и соответствующих им собственных векторов линейного оператора (или матрицы A) называют спектральной задачей.
Примеры:
1. Матрица
M(3,
R)
имеет собственный вектор
M(3,
R)
имеет собственный вектор
![]() ,
отвечающий её собственному значению
= 2, в чём
нетрудно убедиться, вычислив
,
отвечающий её собственному значению
= 2, в чём
нетрудно убедиться, вычислив
 .
.
2. Если в некотором базисе e1 , e2 , e3 линейный оператор : V V имеет матрицу []e предыдущего примера, то вектор 3e1 + 3e2 + 2e3 является его собственным вектором. В самом деле,
(3e1 + 3e2 + 2e3) = 3(e1) + 3(e2) + 2(e3) =
= 3(–e1 + 2e2) + 3(e1 – 2e2) + 2(3e1 + 3e2 + 2e3) =
= 6e1 + 6e2 + 4e3 = 2(3e1 + 3e2 + 2e3).
Этот собственный вектор соответствует собственному числу = 2 линейного оператора и его координатный столбец был найден в примере 1. У линейного оператора есть ещё и другой собственный вектор: (–e1 + 2e2) = = –(e1) + 2(e2) = –(–e1 + 2e2) + 2(e1 – 2e2) = 3e1 – 6e2 = –3(–e1 + 2e2). Собственный вектор –e1 + 2e2 отвечает собственному значению = 3. Как Вы думаете, будет ли оно являться собственным числом матрицы примера 1 ?
3.
Матрица А
=
![]()
M(2, R)
не имеет
собственных чисел, а значит и собственных
векторов. Действительно, если
R
– собственное число матрицы А,
то Аv
= v,
т.е. (A –
I2)v
= 0.
Таким образом, однородная система
линейных уравнений
M(2, R)
не имеет
собственных чисел, а значит и собственных
векторов. Действительно, если
R
– собственное число матрицы А,
то Аv
= v,
т.е. (A –
I2)v
= 0.
Таким образом, однородная система
линейных уравнений
 имеет
ненулевое решение. Значит det
имеет
ненулевое решение. Значит det
![]() = 0,
т.е. 2
+ 1 = 0. Это
уравнение не имеет решений в поле R
. Полученное противоречие показывает,
что предположение о существовании
собственного числа матрицы было не
верным.
= 0,
т.е. 2
+ 1 = 0. Это
уравнение не имеет решений в поле R
. Полученное противоречие показывает,
что предположение о существовании
собственного числа матрицы было не
верным.
4.
Следует отметить, что матрица предыдущего
примера, рассматриваемая над полем
комплексных чисел имеет два собственных
числа i
и –i
. Первому
из них отвечает собственный вектор
![]() , т.к.
, т.к.
![]() .
Какой собственный вектор будет
соответствовать второму собственному
числу ?
.
Какой собственный вектор будет
соответствовать второму собственному
числу ?
5. Пусть R : V2(O, R) V2(O, R) – линейный оператор поворота на угол против часовой стрелки. Решим спектральную задачу для оператора R . Если R(v) = v, то векторы R(v) и v коллинеарны, что возможно лишь при = k (k Z) (?!).
С другой стороны, если = 2k (k Z), то R(v) = v для любого вектора v V2(O, R). Таким образом, при = 2k (k Z), любой ненулевой вектор является собственным для оператора R и отвечает собственному значению = 1. Если же = (2k+1) (k Z), то R(v) = –v при любом векторе v V2(O, R). Таким образом, при = (2k+1) (k Z), любой ненулевой вектор является собственным для оператора R и отвечает собственному значению = –1.
Итак, спектральная задача для оператора R имеет следующее решение: при k (k Z) у этого линейного оператора нет ни собственных чисел, ни собственных векторов; при = 2k (k Z) у него единственное собственное число = 1, которому отвечает множество собственных векторов, состоящее из всех ненулевых векторов плоскости; при = (2k+1) (k Z) у него единственное собственное число = –1, которому отвечает множество собственных векторов, состоящее из всех ненулевых векторов плоскости.
Теорема (о связи спектральных задач для линейного оператора и его матрицы). Пусть – линейный оператор в конечномерном векторном пространстве V с базисом e = (e1 , … , en). Тогда
F Sp() Sp([]e),
вектор v V \ {0} является собственным вектором линейного оператора , отвечающим собственному значению Sp() тогда и только тогда, когда вектор [v]e nF является собственным вектором матрицы оператора []e , отвечающим собственному числу Sp([]e).
Доказательство. Оба утверждения будем доказывать одновременно. Пусть v V \ {0} – собственный вектор линейного оператора , отвечающий собственному числу Sp(). Это равносильно условию (v) = v, которое, в свою очередь, эквивалентно координатной форме записи []e[v]e = = [(v)]e = [v]e . При этом [v]e 0 nF , т.к. v = e[v]e 0 V. Таким образом, [v]e является собственным вектором матрицы []e , соответствующим собственному значению Sp([]e).
Теорема доказана.
Теорема (о решении спектральной задачи для матрицы). Для любой матрицы A M(n, F) справедливы следующие утверждения:
F Sp(A) det(A – In) = 0,
если Sp(A), то однородная система линейных уравнений (A – In)v = 0 nF имеет ненулевые решения, множество которых совпадает с множеством собственных векторов, соответствующих собственному значению .
Доказательство. Оба утверждения будем доказывать одновременно. Если Sp(A) и v nF \ {0} – отвечающий собственный вектор, то Av = v Av – Inv = 0 (A – In)v = 0. Последняя однородная система линейных уравнений имеет ненулевое решение тогда и только тогда, когда определитель её основной матрицы нулевой: det(A – In) = 0.
Обратно, если F и det(A – In) = 0, то однородная система линейных уравнений (A – In)v = 0 имеет ненулевое решение v nF \ {0}, которое удовлетворяет соотношению Av = v, т.е. является собственным вектором, соответствующим собственному числу .
Теорема доказана.
Уравнение det(A – In) = 0, решениями которого являются собственные числа матрицы A (и только они), называется характеристическим уравнением матрицы А. Многочлен А() = det(A – In) называют характеристическим многочленом матрицы А.
Доказанная теорема даёт алгоритм решения спектральной задачи для матрицы А:
I. Составление характеристического уравнения det(A – In) = 0.
II. Нахождение собственных чисел матрицы А – корней её характеристического уравнения.
III. Для каждого собственного числа i нахождение собственных векторов, отвечающих этому числу, – как множества всех ненулевых решений однородной системы линейных уравнений (A – In)v = 0.
Для линейного оператора спектральная задача решается путём предварительного сведения её к спектральной задаче для матрицы этого оператора в подходящем образом выбранном базисе и заключительного нахождения собственных векторов по найденным их координатным столбцам.
Примеры: 1. Решим спектральную задачу для линейного оператора, заданного в пространстве R3 правилом (x; y; z) = (x + z; 2y; –x – z).
0. Выберем стандартный базис
e = (e1 = (1; 0; 0), e2 = (0; 1; 0), e3 = (0; 0; 1))
пространства R3 и найдём матрицу A = []e оператора в этом базисе.
Имеем
(e1)
= (1;
0; 0) = (1; 0; –1) = e1
– e3
,
(e2)
= (0;
1; 0) = = (0; 2; 0) = 2e2
, (e3)
= (0;
0; 1) = (1; 0; –1) = e1
– e3
. Поэтому можно составить матрицу А
= []e
=
 .
.
Решаем спектральную задачу для матрицы А.
I. Составляем характеристическое уравнение det(A – In) = 0.
det(A
– In)
=
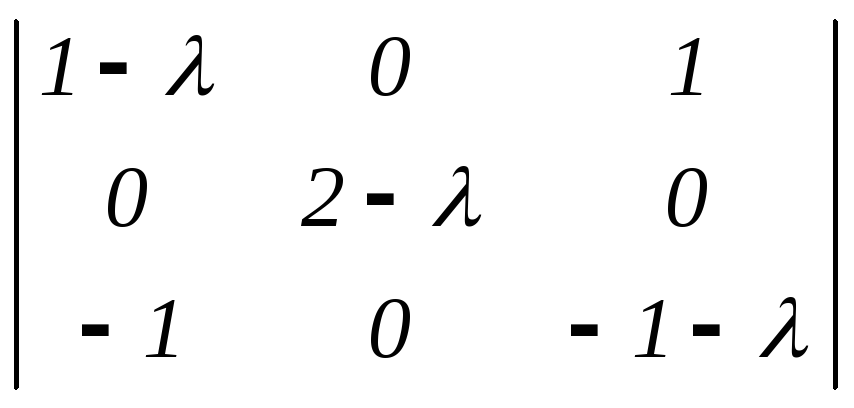 = (1 –)(2
– )(–1
– )
+ (2 – )
=
= (1 –)(2
– )(–1
– )
+ (2 – )
=
= (2 – )((1 – )(–1 – ) + 1) = (2 – )2 = 0.
Таким образом, характеристическое уравнение для матрицы А имеет вид (2 – )2 = 0.
II. Находим собственные числа матрицы А, решая характеристическое уравнение:
1 = 2, 2,3 = 0. Таким образом, Sp() = Sp(A) = {2, 0}.
III. Находим собственные векторы матрицы А.
а) для 1 = 2:
составляем
однородную систему линейных уравнений
 и находим её общее решение методом
Гаусса:
и находим её общее решение методом
Гаусса:
 .
.
Таким
образом, общее решение имеет вид
 , а векторы
, а векторы![]() (v2
0) являются
собственными векторами матрицы А,
соответствующими собственному числу
1
= 2.
(v2
0) являются
собственными векторами матрицы А,
соответствующими собственному числу
1
= 2.
б) для 2, 3 = 0:
составляем
однородную систему линейных уравнений
 и находим её общее решение
и находим её общее решение
 (?!). Таким образом, векторы
(?!). Таким образом, векторы![]() , гдеv3
0, являются
собственными векторами матрицы А,
соответствующими собственному числу
2
, 3 = 0.
, гдеv3
0, являются
собственными векторами матрицы А,
соответствующими собственному числу
2
, 3 = 0.
IV. Находим собственные векторы исходного линейного оператора по формуле v = e[v]e .
a)
для 1
= 2: v
= (e1
, e2
, e3)![]() = v2e2
= v2(0;
1; 0) = (0; v2
; 0) , где v2
R
\ {0}.
= v2e2
= v2(0;
1; 0) = (0; v2
; 0) , где v2
R
\ {0}.
б) для 2,3 = 0:
v
= (e1
, e2
, e3)![]() =
–v3e1
+ v3e3
= –v3(1;
0; 0) + v3(0;
0; 1) = (–v3
; 0; v3
),
где
v3
R
\ {0}.
=
–v3e1
+ v3e3
= –v3(1;
0; 0) + v3(0;
0; 1) = (–v3
; 0; v3
),
где
v3
R
\ {0}.
Итак, линейный оператор имеет собственные числа 1 = 2 и 2,3 = 0. Первому из них отвечают собственные векторы (0; v2 ; 0) , где v2 R \ {0}, а двум другим – векторы (–v3 ; 0; v3 ), где v3 R \ {0}.