

Глава друга склад асу тп
2.1. Основні компоненти
Склад і побудова будь-якої конкретної АСУ ТП вибирається так, щоб система відповідала загально технічним вимогам, установленими ГОСТ і приватним вимогам, які знаходяться в Технічному завданні на її створення.
АСУ ТП повинна:
управляти технологічним об'єктом у відповідності з прийнятим критерієм функціонування;виконувати всі покладені на неї функції у відповідності з призначенням і метою управління;
володіти необхідними показниками і характеристиками точності, надійності та швидкодії;
відповідати ергономічним вимогам, що пред'являються до способів, формою представлення інформації оператору, розміщення технічних засобів і т. д.;
бути пристосованою до взаємопов'язаного функціонування з системами управління суміжних рівнів ієрархії та іншими АСУ ТП, тобто мати властивість технічної та інформаційної сумісності;
допускати можливість подальшої модернізації та розвитку.
Крім того, до конкретної АСУ ТП за погодженням розробника і замовника пред'являються і інші необхідні вимоги. Прийнято вважати, що до складу АСУ ТП входять наступні основні великі компоненти (частина системи):
оперативний персонал, інформаційне, організаційне, програмне та технічне забезпечення.
Відзначимо також, що розробка програмного забезпечення проводиться на основі математичного забезпечення, яке до складу АСУ ТП не входить. Спрощена схема взаємодії цих основних компонентів системи показана на рис. 2.1. Розглянемо її докладніше. Як зазначалося раніше, процес функціонування АСУ ТП (як і будь-яка інша система управління) по суті є процесом цілеспрямованого перетворення вхідної інформації у вихідну. В АСУ ТП це перетворення виконується спільно двома компонентами: оперативним персоналом і технічним забезпеченням (комплексом технічних засобів), саме вони збирають вхідну інформацію від об'єкта та інших зовнішніх джерел, обробляють і аналізують її, а потім приймають рішення з управління та реалізують їх формуючи відповідні керуючі впливи на об'єкт і посилаючи інші сигнали, що несуть вихідну інформацію як своєрідну продукцію системи. Тому оперативний персонал і технічні засоби можна вважати головними компонентами АСУ ТП, повністю визначально її людино-машинний характеру. Щоб і люди, і комплекс технічних засобів (КТЗ) могли функціонувати правильно, у відповідності з прийнятими критеріями, необхідно забезпечити їх відповідними правилами та інструкціями. Для оперативного персоналу це завдання виконують документи організаційного забезпечення АСУ ТП, а для основної частини КТЗ (цифровий ЕОМ) – програмне забезпечення, сукупність її програм як машинно-читаючих алгоритмів (інші частини КТЗ реалізують свої алгоритми апаратним способом самою конструкцією, і тому в додаткових інструкціях не потребують).
Між зазначеними компонентами АСУ ТП в процесі її функціонування існує інтенсивна взаємодія (рис. 2.1.): організаційне та програмне забезпечення визначають поведінку оперативного персоналу і ЕОМ відповідно; крім того, персонал активно взаємодіє з технічним забезпеченням і при необхідності коректує програмне забезпечення.
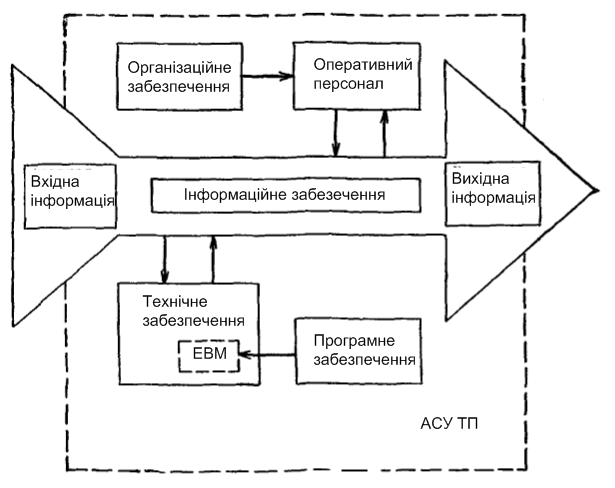
Рис. 2.1. Спрощена схема взаємодії основних компонентів АСУ ТП.
Всі ці взаємодії всередині системи, а також її взаємодія з зовнішнім середовищем несуть в основному і насамперед інформаційний характер, так як зводяться до передачі і прийому інформації у виді різних сигналів, данних, повідомлень, текстів і інше. Такий інформаційний обмін вимагає певних угод по прийнятих формах і можливих значень (змісті, сенсі), тих чи інших інформаційних елементів. Сукупність цих угод та безліч прийнятих форм масивів даних документів, переліків і шкал використовуваних сигналів, кодів і правил їх розшифровки утворює ще один умовно виділений основний компонент АСУ ТП, яке називається інформаційне забезпечення.
Важлива роль цього компонента полягає в тому, що саме через нього (рис. 2.1.), а точніше з його допомогою здійснюються всі процеси обміну інформацією як усередині АСУ ТП, так і з зовнішнім середовищем. Технічне, інформаційне, і програмне (а також математичне) забезпечення АСУ ТП докладно висвітлюються в наступних параграфах. Тут дамо додаткові короткі пояснення до понять «оперативний персонал» і «організаційне забезпечення АСУ ТП».
Оперативний персонал АСУ ТП складається із технологів-операторів (диспетчерів), що здійснюють контроль і управління об'єктом, і експлуатаційного персоналу, який забезпечує правильність функціонування всіх технічних і програмних засобів системи. При сучасному ступені автоматизації багатьох (особливо безперервних) технологічних процесів чисельність операторів (диспетчерів) буває не велика (одна-дві людини). Однак при розробці та експлуатації АСУ ТП слід мати на увазі, що до складу оперативного персоналу, крім операторів (диспетчерів), входить також експлуатаційний персонал, який покликаний своєчасно виконувати всі роботи по обслуговуванні та оперативному відновленні даної системи (ремонтний персонал до складу оперативного включати не прийнято). Основні функції оперативного персоналу і його центральна роль в АСУ ТП будуть розглянуті далі, в главі 3.
Склад оперативного персоналу конкретної АСУ ТП і встановлені взаємовідносини між його працівниками визначають організаційну структуру системи. Елементами такої структури є окремі посадові особи - виробничі або адміністративні працівники, які здійснюють в тій чи іншій мірі управління даним технологічним об'єктом, або їх групи, сформовані за якою-небудь змістовною ознакою. Основні зв'язки між елементами організаційної структури відповідають відносинам оперативної співпорядкованості зазначених працівників, істотним для процесу управління. При необхідності на схемі організаційної структури відображають також територіальне розміщення оперативного персоналу АСУ ТП і його взаємодію з персоналом інших систем та (або) рівнів управління.
Організаційне забезпечення АСУ ТП являє собою сукупність документів, які встановлюють порядок та правила функціонування оперативного персоналу даної системи. Сюди входять технологічні інструкції та регламенти, що визначають ведення процесу, інструкція з експлуатації системи, опису її функціональної, організаційної та технічної структур, а при необхідності інші документи аналогічного змісту. Роль організаційного забезпечення в сучасних АСУ ТП часто недооцінюється, між тим вона дуже важлива: по суті організаційне забезпечення регламентує всю діяльність людини в системі, від найпростіших операцій до її поточного обслуговування до найскладніших і відповідальних дій, наприклад, щодо оптимізації процесу або по виявленню та ліквідації перед аварійних станів. Тому необхідно, щоб в організаційному забезпеченні були чіткі, строгі правила і приписи, що підлягають неухильному виконанню, поєднувалися з положеннями, не тільки залишають певну міру свободи в діяльності людини, але навіть стимулюючими його творчі можливості для подальшого вдосконалення процесу управління. З цією метою при розробці низки документів організаційного забезпечення слід враховувати прийнятий на даному підприємстві порядок соціалістичного змагання, преміювання та економічного стимулювання.
Решта загальні вимоги до організаційного забезпечення АСУ ТП досить прості:
Організаційне забезпечення повинно містити сукупність правил і розпоряджень, що регламентують взаємодію оперативного персоналу з комплексом технічних засобів і між собою під час роботи системи;
В документах організаційного забезпечення повинні бути приведені всі необхідні дані про порядок експлуатації системи, в тому числі про заходи з підтримки її точності і надійності;
Інструкції по експлуатації АСУ ТП мають мати вказівки про дії оперативного персоналу в нормальних, перед аварійних і аварійних ситуаціях.
2.2. ТЕХНІЧНЕ ЗАБЕЗПЕЧЕННЯ
Як зазначалося раніше, під технічним забезпеченням АСУ ТП прийнято розуміти комплекс технічних засобів, призначених для функціонування АСУ ТП. За своїми можливостями КТС конкретної АСУ ТП повинен бути достатнім для виконання всіх покладених на нього функцій системи. У його склад зазвичай входять засоби отримання, перетворення, передачі і відображення інформації, керуючі, обчислювальні та виконавчі пристрої. Таким чином технічне забезпечення АСУ ТП включає в себе повний набір засобів автоматизації та обчислювальної техніки, що використовуються в системі. До складу технічного забезпечення АСУ ТП повинні також входити прилади та пристрої, необхідні для налагодження і перевірки працездатності комплексу технічних засобів АСУ ТП, і запасні прилади. Технічні характеристики використовуваних засобів АСУ ТП повинні допускати взаємозамінність однойменних технічних засобів, бути обрані з урахуванням впливів навколишнього середовища і забезпечувати безпечну експлуатацію системи.
Технічні засоби, найбільш характерні для АСУ ТП, і їх територіальне розміщення наведено для прикладу на рис. 2.2.
Безпосередньо на об'єкті управління встановлюються:
первинні вимірювальні перетворювачі (датчики), що сприймають значення параметрів процесу (тиск, витрата газів або рідин, температуру, електричну потужністю, рівень рідини і т. д.);
сигнальні двопозиційні пристрої, що дають інформацію про включенні або виключенні того чи іншого обладнання;
виконавчі двопозиційні або регулюючі органи, що здійснюють керуючі впливу шляхом відкриття вентилів і заслінок, зміни частоти обертання двигунів, режиму роботи насосів і т. п.
У безпосередній близькості від технологічних об'єктів встановлюються місцеві щити управління, на яких монтуються регулятори 1, вторинні вимірювальні прилади показують 2 і самописні 3, а також інші пристрої і вузли локальної автоматики 4. Іноді місцеві щити не є постійним робочим місцем персоналу, ними користуються обхідники, змінні майстри у міру потреби. Оператор, провідний технологічний процес всього об'єкта управління, постійно знаходиться в центральному пункті управління (див. § 3.3), який обладнаний щитами, пультами, а також електрифікованою друкуючою машинкою 15 для реєстрації параметрів за викликом оператора і кросовою шафою 16.
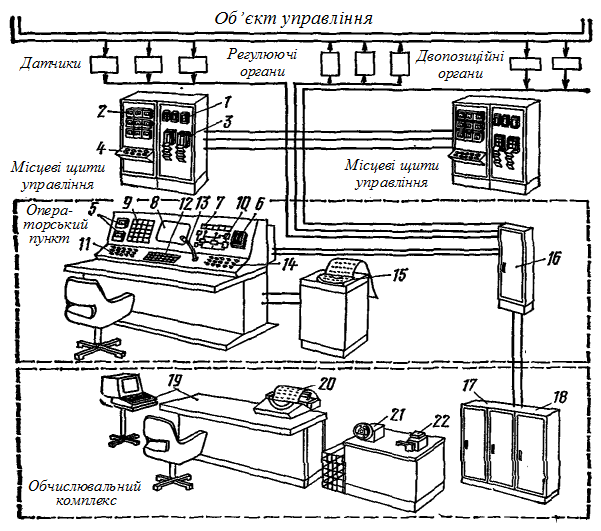
Рис. 2.2. Характерний приклад технічного забезпечення АСУ ТП.
На пульті встановлені аналогові вимірювальні прилади (показуючі 5, самописні 6), цифрові 7, що показують по виклику оператора адресу (номер) і значення вказують робочі параметра, індикатори на електронно-променевих трубках 8 для представлення оператору буквено-символьної і графічної інформації (дисплеї), сигнальні табло 9, повідомляють оператору ті чи інші рекомендації по веденню керованого процесу.
Крім того, часто є мнемонічна схема 10, відповідна технологічному процесу і дає оперативну інформацію про стан об'єкта в будь-який момент часу (які саме агрегати включені, які заслінки перекриті і т. д.); на мнемосхемі автоматично індукується відхилення того чи іншого параметра від норми .
На пульті оператора також встановлюються:
дистанційні датчики 11, що дозволяють оператору змінювати уставки регуляторів, змонтованих на місцевих щитах;
клавіатура 12 для виклику показань на цифрові прилади 7;
засоби цехового зв'язку 13 (телефонний комутатор або селектор, гучномовний зв'язок і т. п.);
ключі дистанційного керування 14, що дозволяють оператору проводити на об'єкті ті чи інші перемикання.
На центральному пункті розміщується ЕОМ – обчислювальний комплекс АСУ ТП (див. § 3.2). До його складу входять:
пристрої інформаційної підсистеми 17 (комутатори сигналів, аналого-цифрові перетворювачі, пристрій вироблення відхилень параметрів, що перевищують допустимі значення, пристрій пам'яті граничних значень параметрів, пристрій масштабування для перетворення відносних показників датчиків в абсолютні, пристрій опитування станів сигнальних двохпозиційних органів та ін.);
пристрої керуючої підсистеми 18 [арифметичний пристрій, оперативний запам'ятовуючий пристрій, зовнішній запам'ятовуючий пристрій на магнітних дисках або стрічках, пристрій мультиплексного (селекторного) зв'язку з іншими пристроями обчислювального комплексу, цифро-аналоговий перетворювач, пристрої кодового управління виконавчими механізмами або органами сигналізації на щиті оператора, пристрій аналогового управління регуляторами і регулюючими органами та ін.];
інженерний пульт (пульт програміста) 19 – робоче місце оператора ЕОМ;
електрична друкуюча машинка 20, аналогічна машинці 15 в операторському пункті, але призначена для періодичної преси (наприклад, облікових показників за зміну);
зчитувач з перфострічки 21 для введення програм і постійної інформації в пам'ять машини;
стрічковий перфоратор 22 для перфорації на паперовій стрічці проміжних результатів розрахунків.
Сукупність усіх технічних засобів АСУ ТП, зазначених у вигляді конструктивно самостійних приладів, вузлів, пристроїв, прийнято представляти у вигляді технічної структури АСУ ТП, яка відображає основні самостійні частини комплексу технічних засобів, що використовуються в системі; зв'язки між цими елементами символізують реальні фізичні лінії (електричні проводи, кабелі, пнемо-проводи і т. п.), що з'єднують окремі засоби автоматизації в спільно функціонуючий комплекс.
Повна технічна структура АСУ ТП повинна відображати всі основні засоби, необхідні для виконання функцій системи, Однак на практиці основна увага приділяється центральній частині комплексу засобів, що охоплює ті інформаційні, обчислювальні та керуючі пристрої, за допомогою яких виробляються централізована переробка інформації (включаючи управління) та її уявлення персоналу. Ця частина характеризує технічну структуру інформаційно-обчислювальної або інформаційно-керуючої підсистеми АСУ ТП. Технічна структура АСУ представляється у вигляді структурної схеми, супроводжуваної пояснювальним текстом.
Приклад укрупненої схеми технічної структури АСУ хімічним виробництвом, що складається з кількох цехів, показаний на рис. 2.3. Інформація від об'єкта управління надходить через пристрій телемеханіки з декількох (до 25) контрольованих пунктів (КП), встановлених у цехах та пов'язаних з пунктом управління (ПУ) двохпровідного зв'язку. Апаратура ПУ зв’язана з обчислювальним комплексом і має виходи на наступні пристрої: пульт диспетчера, щит сигналізації, щит реєструючих приладів та апаратуру алфавітно-цифрового друку. Обчислювальний комплекс має вихід на щит реєструючих приладів, станцію індикації даних (дисплей) і пульт диспетчера.
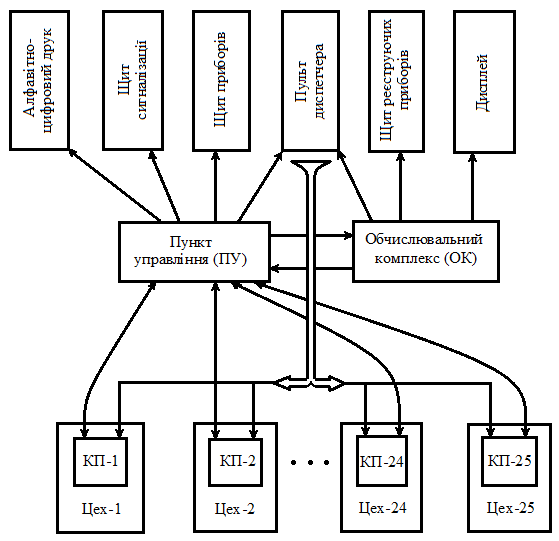
Рис. 2.3. Приклад технічної структури АСУ хімічним виробництвом.
Функціональна (див. § 1.2) та технічна структури АСУ ТП не є тотожними і представляють різні аспекти однієї і тієї ж системи. Так, схема функціональної структури відображає склад і порядок виконання функцій системи управління технологічним процесом. У схемі технічної структури умовно зображуються засоби, за допомогою яких реалізуються ці функції.
2.3. МАТЕМАТИЧНЕ ЗАБЕЗПЕЧЕННЯ
Відповідно до термінологічними стандартами під математичним забезпеченням АСУ ТП розуміється сукупність математичних методів, моделей і алгоритмів, що використовуються при розробці та функціонуванні таких систем. У міру розвитку застосування обчислювальної техніки в АСУ ТП їх математичне забезпечення разом з побудованим на його основі програмним забезпеченням набуває все більшого значення і стає порівнянним, а іноді і перевищує по вартості комплекс використовуваних технічних засобів. Образно кажучи, математичне забезпечення - це «ідеологічний зміст» АСУ або так званий м'який товар (на відміну від так званого твердого товару, яким іменують технічні засоби системи управління).
Як зазначалося раніше, управління об'єктом включає в себе комплекс операцій, необхідним для формування відповідних цілеспрямованих впливів на керований об'єкт, а саме операції контролю (отримання інформації), аналізу (вироблення і прийняття рішень) і виконання (реалізація керуючих впливів). Операції отримання інформації та реалізації керуючих впливів в більшості випадків виконуються в АСУ ТП автоматично, за допомогою засобів технічного забезпечення, розглянутих раніше. Що ж стосується операцій вироблення і прийняття рішень по управлінню, то, як правило, перш ніж вибрати спосіб їх реалізації, необхідно знайти оптимальний (або хоча б раціональний) алгоритм їх виконання. Для цього кожну задачу управління треба сформулювати математично.
Математичне формулювання будь-якої задачі оптимального управління включає в себе два елементи: математичну модель об'єкта і критерій управління. Під математичною моделлю розуміють систему математичних співвідношень, що описують поведінку об'єкта управління і ті умови (обурення, обмеження і т. д.), в яких він працює. Для представлення моделі в аналітичній формі необхідно знати фізичну природу керованого об'єкта, його структуру та конструктивні особливості. Модель завжди в тій чи іншій мірі наближених і може не враховувати ряду тонких явищ, що відбуваються в об'єкті, і в той же час може з успіхом використовуватися для визначення керуючих впливів при різних сукупностях значень параметрів об'єкта. Це можна зробити як в темпі з ходом процесу, так і в режимі випереджаючого аналізу, оскільки велику швидкодію сучасних обчислювальних машин дозволяє провести відповідні випереджальні розрахунки.
Якщо характеристики керованого об'єкта схильні до змін, то відповідність моделі об'єкту має безперервно перевірятися і уточнюватися на основі інформації про стан об'єкта. Модель закладається в обчислювальну машину (тобто зберігається в її запам'ятовуючому пристрої у вигляді програми). Користуючись моделлю, можна випробувати різні управляючі дії, отримати і зафіксувати реакції моделі на ці впливи, а потім вибрати ті з них, які найбільшою мірою задовольняють оптимальному критерію.
Обчислювальні комплекси, що входять в АСУ, накопичують інформацію про керований процесі у вигляді сукупності значень вимірюваних параметрів, відомостей про стан устаткування та іншу і переробляють її для вироблення управляючих впливів. Переробка інформації в ВК здійснюється за алгоритмами, які відображають технологічну інструкцію ведення процесу. В інструкції сказано про те, яким чином, володіючи інформацією про процес, отриманої на основі вимірів, і знаючи всі обмеження, що накладаються на процес, вибирати доцільні управляючі дії в різних виробничих ситуаціях. Кожен алгоритм, виконуваний ВК, приблизно відповідає тим міркуванням і обчислень, які мав би справити сам оператор. За відсутності обчислювальної машини. Такий алгоритм-інструкція, виражений на формальній мові математичних формул і логічних умов, визначає послідовність дій, кожне з яких відповідає виконанню обчислювальною машиною (або іншими технічними засобами) певної елементарної операції. Такими операціями є додавання, віднімання, логічне додавання, множення та ін.
Послідовність дій не довільна, а реалізує той чи інший метод розв'язання задачі. Цей метод іноді може бути спочатку заданий у вигляді математичної формули, іноді в словесній (описової) формі, іноді у вигляді ланцюжка логічних умов. У всіх випадках він повинен бути сформульований настільки точно і чітко, щоб не залишалося місця для різних тлумачень і двозначностей, щоб завжди після кінцевого числа елементарних операцій був отриманий певний чисельний або логічний (дискретний) результат. Якщо ці умови виконуються, то інструкція по вирішенню задачі, виражена на формальній мові математичних формул і логічних умов, називається алгоритмом розв'язання даної задачі.
Стосовно до АСУ говорять про алгоритми управління. Алгоритм управління - це теж формальна інструкція, в якій йдеться про те, як треба обробити інформацію про керований процес, щоб отримати доцільні керуючі впливи. Алгоритм управління, що відображає загальну мету системи управління, досить складний і може бути розчленований на велике число під-алгоритмів, відповідних окремим задачам (функціям) системи управління. Ці під-алгоритми пов'язані між собою так, що в певних виробничих ситуаціях «працюють» окремі ланки загального алгоритму. Таким чином, безліч окремих алгоритмів функціонує не у фіксованій послідовності (один за іншим) і не хаотично, а вибудовується в різні ланцюжки в залежності від мінливої виробничої ситуації.
Пояснимо це таким прикладом. Нехай одним з елементів технологічної схеми об'єкта (рис. 2.4) є теплообмінник, в якому нагрівається вода, а теплоносієм служить водяна пара. Необхідно стабілізувати, тобто підтримувати на заданому значенні температуру Т води на виході з теплообмінника.
Без застосування ЕОМ таке регулювання може бути виконано стандартним регулятором, у якого температура Т є регульованим параметром, а керуючий вплив подається на виконавчий механізм (регулюючий клапан) K1, що змінює витрата теплоносія. Так як теплообмінник є досить інерційним об'єктом, схильним до впливу різких збурень по витраті води, то зазвичай для досягнення достатньо високої якості регулювання температури Т доводиться використовувати багатоконтурну схему регулювання.
У якості «прикладу розглянемо, як для вирішення такого завдання можна використовувати ЕОМ. Приклад функціональної схеми задачі P1 - «Регулювання температури води на виході з теплообмінника» - показаний також на рис. 2.4. На об'єкті встановлюються датчики, що дозволяють вимірювати температуру води Т на виході з теплообмінника, температуру води T1 на вході в теплообмінник, витрата Q1 води в теплообміннику, витрата (Q2 нагрітої пари і температуру Т2 нагрітої пари, а також виконавчий механізм K1, який регулює витрату пари.
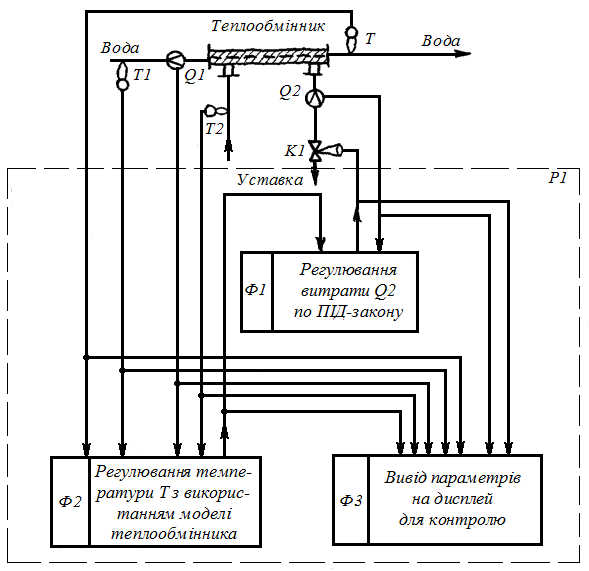
Рис. 2.4. Функціональна схема задачі «Регулювання температури води на виході з теплообмінника».
Функціонально завдання ділиться на три взаємопов'язані частини. Перша частина (Ф1) відповідає регулюванню (стабілізації) витрати (Q2) нагрітої пари по ПІД-закону. Друга частина (Ф2) являє собою математичну модель теплообмінника, користуючись якою можна так змінювати уставку регулятора Ф1, щоб оптимальним був критерій якості регулювання температури T. Третя частина завдання (ФЗ) включає в себе всі ті дії, які дозволяють оператору-технологу в цікавлять його моменти часу візуально контролювати значення параметрів даної ділянки об'єкта та відповідних управляючих впливів. Це здійснюється за допомогою дисплея.
Показана на мал. 2.4 функціональна схема дозволяє зрозуміти задум рішення задачі, тобто підхід до вирішення. Наступним кроком в деталізації його розробки є побудова укрупненої блок-схеми алгоритму (рис. 2.5). Алгоритм розчленований тут на два під алгоритми. Під алгоритм А реалізує ту частину рішення задали, яка повинна виконуватися в безперервному автоматичному режимі, тобто дії, пов'язані з регулюванням, Під алгоритм Б виконується тільки за запитом оператора-технолога. Природно, що обидва під алгоритми взаємопов'язані з використання загальних даних.
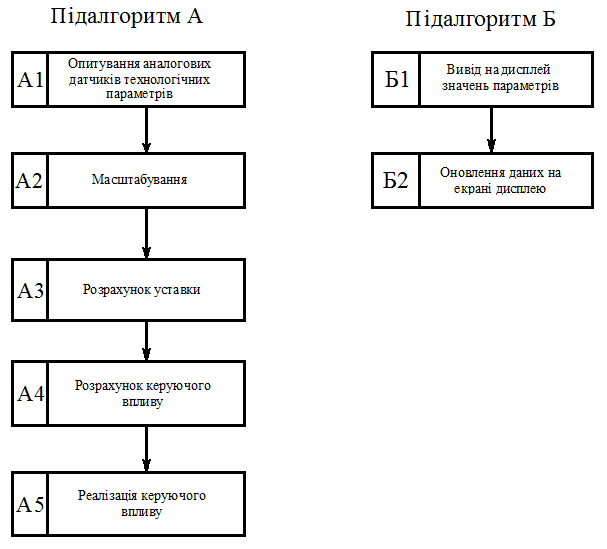
Рис. 2.5. Укрупненої блок-схеми алгоритму розв'язання задачі
Алгоритмічна структура розглянутої задачі може бути зображена з різним ступенем деталізації. Зазвичай кожному блоку укрупненої схеми відповідають більш детальні блок-схеми. В якості прикладу на рис. 2.6 показана блок-схема алгоритму одного з блоків укрупненої схеми - блоку «Розрахунок уставки». При подальшій деталізації алгоритму розробляється докладний опис кожного блоку. Воно включає в себе математичні формули, логічні умови їх взаємозв'язків і тимчасові характеристики виконання окремих блоків.
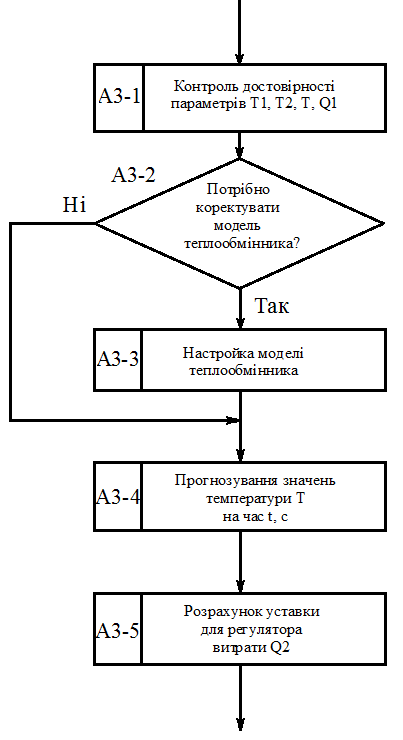
Рис. 2.6. Блок-схема алгоритму А-3
Сукупність матеріалів, що відображають алгоритм вирішення задачі, має дві спрямованості. По-перше, вона фіксує ідейні аспекти: задум і метод розв'язання задачі і, по-друге служить завданням на наступний етап деталізації алгоритму - етап перетворення прийнятої сукупності в комплекс взаємодіючих програм ЕОМ.
2.4. ПРОГРАМНЕ ТА ІНФОРМАЦІЙНЕ ЗАБЕЗПЕЧЕННЯ
Програмне та інформаційне забезпечення входить до складу кожної АСУ ТП з цифровим обчислювальним комплексом. При цьому, якщо математичне забезпечення АСУ ТП фіксує ідейні аспекти організації управління, то програмне та інформаційне забезпечення являє собою конкретну реалізацію комплексу машинних алгоритмів функціонування системи управління. Програмне забезпечення охоплює круг рішень, пов'язаних з розробкою і експлуатацією програм ЕОМ, а інформаційне забезпечення визначає способи і конкретні форми інформаційного відображення стану об'єкта управління як у вигляді даних в ЕОМ, так і у вигляді документів, графіків, сигналів для їх подання фахівцям, які беруть участь в управлінні технологічним процесом.
Виділення інформаційного забезпечення АСУ ТП у вигляді самостійного компонента розробки і експлуатації системи відбулося лише в останні роки, і чітку грань між програмним та інформаційним забезпеченням в даний час провести важко. У значній частині технічної літератури по АСУ термін «програмне забезпечення» застосовують в широкому сенсі, включаючи в нього і поняття «інформаційне забезпечення». У такому ж сенсі використовується термін «програмне забезпечення» і надалі.
а) Поняття про програмне забезпечення
Нагадаємо, що під програмою прийнято розуміти алгоритм, поданий у формі, яка сприймається обчислювальною машиною. У свою чергу поняття «алгоритм», як вказувалося раніше, можна охарактеризувати як точне розпорядження, що визначає процес обчислень і провідне від варійованих вихідних даних до шуканого результату.
Програмне забезпечення АСУ ТП можна описувати з різним ступенем подробиць в залежності від того, для кого призначений такий опис. У більшості підручників з програмного забезпечення і монографій, а також у документації, що поставляється з ЕОМ, містяться дуже докладні дані про роботу апаратури та виконання програм. Цей ступінь подробиць дозволяє кваліфікованим фахівцям за допомогою контрольно-вимірювальних приладів або спеціальних тестових програм виявляти та усувати несправності.
Однак для більшості фахівців, які не є ні програмістами, ні фахівцями в галузі електроніки, немає необхідності в настільки детальних відомостях. Для них достатньо мати уявлення про роботу апаратури та виконанні програм на так званому логічному рівні. Це означає, що при логічному уявленні фахівець оперує не фізичним описом явищ, а їх логічними аналогами.
Зазвичай при описі принципової схеми і функціонування ЕОМ (див. § 3.2) виділяють різні блоки апаратури та програмне забезпечення. Однак для логічного представлення ЕОМ цей поділ не конструктивний, так як в різних моделях ЕОМ одні й ті ж функції можуть бути реалізовані або у вигляді схемних (апаратурних) вузлів, або у вигляді програм.
На логічному рівні в схемі ЕОМ (рис. 2.7) доцільно виділити три частини: пристрій виконання програм, програми та дані.
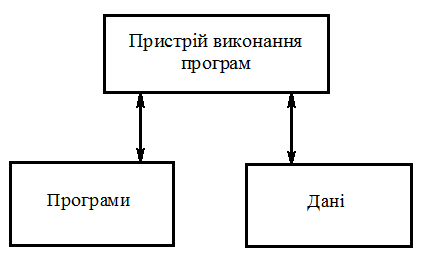
Рис. 2.7. Збільшена функціональна схема ЕОМ
Призначення будь ЕОМ зводиться до перетворення даних. Якщо призначенням токарного верстата є перетворення форми деталі, а трансформатора - перетворення напруги електричного струму, то роль ЕОМ полягає в перетворенні даних. Більш докладно про поняття «дані» буде сказано далі, а тут тільки відзначимо, що характерними прикладами даних можуть служити числа або тексти.
Та частина ЕОМ, яка умовно віднесена до програм, містить (зберігає) набори команд, що описують послідовність дій над даними для досягнення певної мети. Іншими словами, програма - це послідовність команд, які необхідно виконати для реалізації заданого алгоритму обробки даних.
Якщо програма реалізує деяку функцію АСУ ТП, то таку програму називають функціональною. Найпростішим прикладом такої програми може служити програма, що складається з двох команд:
1. Ввести сигнал від датчика, що вимірює температуру.
2. Вивести значення отриманої температури на цифровий індикатор.
Більш складним прикладом може служити програма сигналізації порушень технологічного регламенту.
Пристрій виконання програм послідовно виконує одну команду програми за другою. Ці команди «змушують» вводити дані з пристроїв введення (з друкуючої машинки, клавіатури, дисплея, аналогових датчиків параметрів технологічних процесів), вести задане перетворення даних і здійснювати їх висновок на різноманітні пристрої (символьної реєстрації, аналогові реєстратори, виконавчі механізми, дисплей і т. д.).
Для опису послідовності команд використовуються спеціальні мови, звані мовами програмування. У деяких з них (АССАМБЛЕР, АЛМО) програміст повинен описувати дуже докладно послідовність обробки даних. Наприклад, на мові АССАМБЛЕР для отримання суми двох чисел А і В необхідно скласти програму в наступному вигляді:Alpha
1. Виділити пам'ять в ОЗУ для А.
2. Виділити пам'ять в ОЗУ для В.
3. Виділити пам'ять в ОЗУ для X.
4. Помістити в регістр вміст А.
5. Скласти вміст регістра з вмістом В.
6. Послати результат в X.
На інших мовах (ФОРТРАН, АЛГОЛ) можливо більш укрупнений опис, і для наведеного вище прикладу програма виглядає так:
Х = А + В.
Властивості програм, про які буде розказано далі, властиві всім програмам АСУ ТП незалежно від того, на яких мовах вони написані.
Першою важливою рисою функціональних програм АСУ ТП є те, що для кожної програми існує регламент її виконання. Він може включати один або декілька із зазначених нижче режимів виконання програми:
1. Періодичне включення програми через часовий інтервал Т.
2. Включення програми в заданий час доби.
3. Включення програми на вимогу іншої програми.
4. Включення програми на вимогу оператора.
Прикладом періодично виконуваної програми може служити програма, що реалізує регулювання технологічного параметра за стандартним законом (наприклад, ПІД-регулювання). Періодичність, включення такої програми може становити секунди чи хвилини.
У заданий час доби, наприклад в 00 год. 00 хв., включається програма, що розраховує техніко-економічні показники роботи цеху (установки) за минулу добу.
На вимогу оператора включаються, наприклад, програми, що здійснюють пуск (або зупинка) агрегату і ін.
Другою характерною рисою програм АСУ ТП є їх масовість, численність. У роботі системи можуть брати участь до ста окремих програм і більше. Так як включення в роботу кожної програми повинно здійснюватися за своїм регламентом, можуть зустрічатися ситуації, коли одночасно кілька програм будуть вимагати свого виконання. Апаратурні можливості сучасних ЕОМ цього не дозволяють; тому пристрій виконання програм повинен вміти послідовно виконати всі програми, які очікують свого виконання, причому у відповідності з важливістю (пріоритетом) програм в першу чергу воно повинно виконувати ті програми, які в даний момент найголовніші.
Третьою особливістю програм АСУ ТП є те, що для їх зберігання зазвичай використовується декілька видів пам'яті: постійний запам'ятовуючий пристрій (ПЗП), оперативний запам'ятовуючий пристрій (ОЗП), магнітні диски, магнітні стрічки, перфострічки. Їхня відмінність полягає в тому, що пристрій виконання програм витрачає істотно різний час на виконання програм, що зберігаються в запам'ятовуючих пристроях різних видів. Як правило, при виконанні програми, що зберігається на перфострічці, цей час зростає в порівнянні з часом виконання програми, що зберігається в ПЗП.
б) Склад програмного забезпечення АСУ ТП
Поняття «програмне забезпечення (ПЗ) АСУ ТП» охоплює сукупність всіх програмних засобів, що беруть участь у функціонуванні АСУ ТП. Спеціалістам по програмному забезпеченню відомо велике число елементів ПЗ і складна логічна схема їх взаємодії. Однак збільшена схема ПЗ АСУ ТП (рис. 2.8) виглядає досить просто і базується на тих поняттях, які були введені вище.
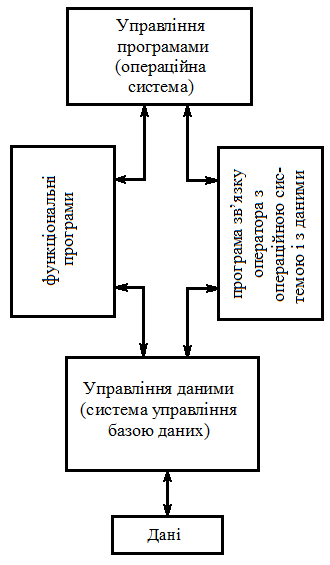
Рис. 2.8. Збільшена схема програмного забезпечення АСУ ТП
Природно, що основними елементами цієї схеми є програми і дані. Як було зазначено раніше, на пристрій виконання програм, окрім власне виконання команд, покладаються, по-перше, завдання, пов'язані з виконанням великої кількості програм по різноманітним регламентам, і, по-друге, функції підготовки даних до обробки. Зазначені функції в більшості сучасних систем реалізовані програмно (а не апаратурно) і являють собою частину програмного забезпечення АСУ ТП. Одну частину цього програмного забезпечення можна назвати «Управління програмами», а другу - «Управління даними». В документації на програмне забезпечення ЕОМ поняттю «Управління програмами» відповідає термін «Операційна система» (ОС). Функції реальних операційних систем значно ширші, ніж власне управління програмами. Однак інші можливості ОС орієнтовані на кваліфікованих програмістів і для розуміння функціонування ЕОМ в АСУ ТП нічого не додають.
Основні режими взаємодії ОС з програмами показані на рис. 2.9. На малюнку умовно показано, ініціювати (включати) в роботу програму А може тільки ОС. Вона ж дізнається про завершення її виконання. Причинами для включення програми можуть бути наступ заданого моменту часу (наприклад, 14 год. 16 хв.), закінчення заданого інтервалу (періоду) тривалістю Т, надходження вимоги оператора.
Так як операційна система керує виконанням всієї сукупності програм, то взаємодії програм між собою здійснюються тільки через посередника - операційну систему. Тому на рис. 2.9 показані дві можливості під час виконання однієї програми викликати (включити) іншу.
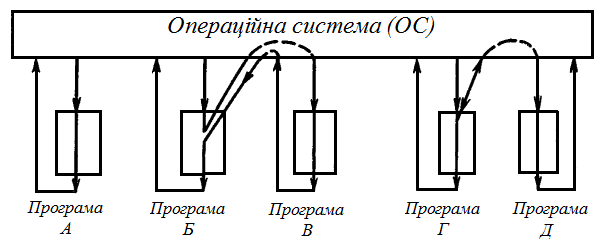
Рис. 2.9. Взаємодія програм з операційною системою і між собоюAlpha
У першому випадку операційна система, отримавши під час виконання програми Б виклик програми В, виконає її і лише потім продовжить виконання програми Б. Наприклад, якщо програма Б описує послідовність дій з пуску технологічного агрегату, а програма В здійснює пуск одного з апаратів, то необхідно саме така взаємодія програм. У другому випадку після надходження виклику програми Д продовжується виконання програми Г. Наприклад, якщо програма Г виявила не дуже небезпечне відхилення від технологічного регламенту, про який потрібно повідомити оператору-технологу, а це здійснює програма Д, то, викликавши її, операційна система може дозволити продовжити виконання програми Г і лише потім перейти до програми Д.
Поняттю «Управління даними» в сучасних ЕОМ відповідає програмне забезпечення, іменоване «Система управління базою даних» (СУБД). Основним завданням СУБД є організація збереження даних в пристроях пам'яті декількох видів і видача функціональним програмам даних в тій формі, в якій вони потрібні для обробки. Роль СУБД останнім часом значно зросла. Це пов'язано з тим, що забезпечити інформаційний взаємозв'язок десятків програм в АСУ ТП дуже складно. Збільшені дані можна розділити (рис. 2.10) на локальні (для однієї програми) і глобальні (загальні для декількох програм). Такий розподіл дозволяє раціонально обслуговувати кожний вид даних; зокрема, воно дає можливість програмісту програми А не знати про даних програми В; дані можуть зберігатися в пам'яті того виду, який по швидкості доступу (тобто читання і запису) відповідає вимогам, що пред'являються до програм А чи В.

Рис. 2.10. Локальні дані програм і глобальні дані АСУ ТП
Зазвичай СУБД (як і операційна система) володіють набором функцій, якими можна скористатися, звертаючись до СУБД з програми або з пульта оператора. Типовими функціями є:
оголосити про існування нового елемента даних, повідомивши його ім'я і технічні характеристики, що дозволяють СУБД відвести для нього місце;
дізнатися значення елемента по його імені;
змінити значення елемента;
дізнатися характеристики елемента даних (тип, місце зберігання, достовірність).
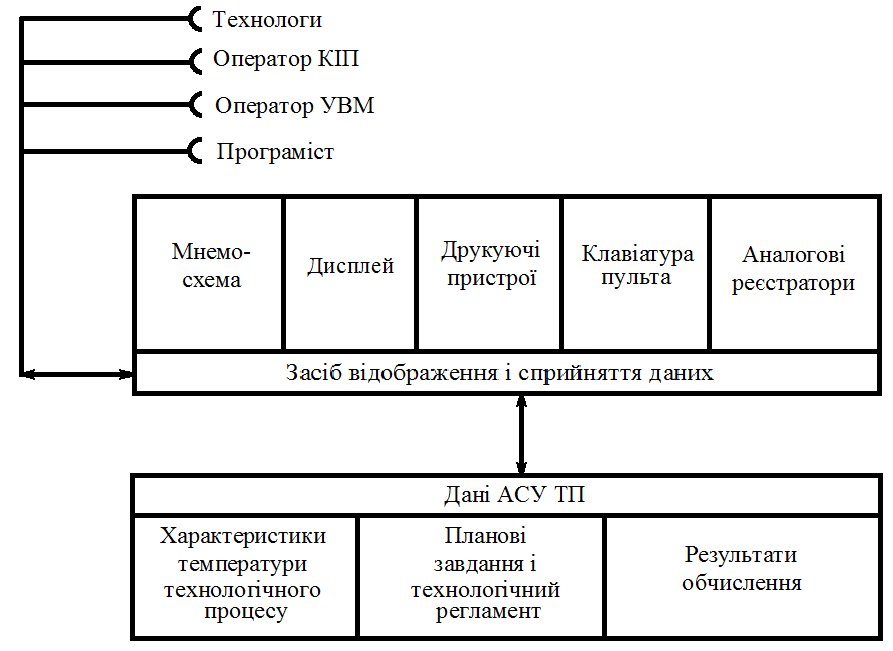
Рис. 2.11. Схема зв’язку оператора з даними
Ще однією частиною програмного забезпечення АСУ ТП (див. рис. 2.8) є програми, що обслуговують зв'язок людей з операційною системою і з даними. Цей розділ програмне забезпечення має велике значення в АСУ ТП, так як в роботі системи управління бере участь людина. Схема зв'язку оператора з даними показана на рис. 2.11. Для представлення даних операторам в АСУ ТП є великий набір технічних засобів: друкуючі пристрої, дисплеї, мнемосхеми і т. д. Так як з АСУ ТП взаємодіють люди різних спеціальностей і різного рівня знань в області ЕОМ і програмування, то до програм зв'язку операторів з операційною системою і з даними пред'являються різноманітність вимоги зручності спілкування людини з ЕОМ.
лом окремих закінчених алгоритмів або підалгоритмів. Це положення викликано тим, що при діленні повного алгоритмічного опису функцій системи на окремі алгоритми і підалгоритми виходять насамперед з того, щоб зручно було обмежити і сформулювати постановку кожної задачі, її задум. При цьому намагаються опустити ті подробиці, які не потрібні для зазначеної діли.
На відміну від етапу розробки алгоритмів на етапі програмування всі алгоритми, що доручаються машині, деталізуються до такого рівня, коли його можна виконати на ЕОМ із заданими характеристиками. Для цього проводиться структуризація програм, тобто вирішується питання про те, скільки програм буде відповідати алгоритмічної постановці і як розподілиться весь алгоритм за окремими програмами. Результатами цієї роботи є склад (перелік) програм та схема їх взаємодії.
Друге коло питань пов'язане з організацією взаємодії програм, які можуть взаємодіяти в двох аспектах: одна програма може ініціювати (викликати) роботу іншої програми, і (або) між програмами може мати місце обмін даними.
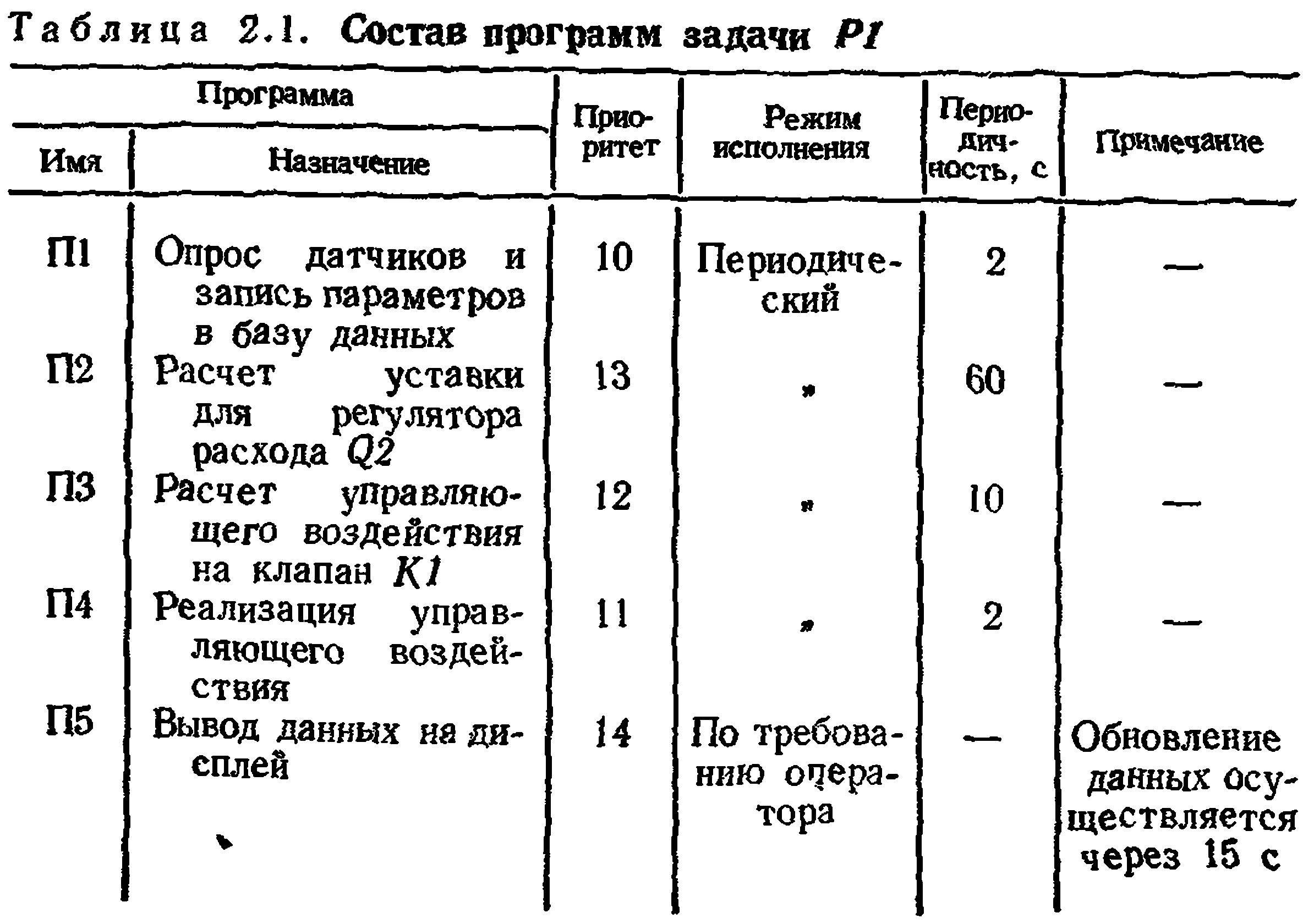
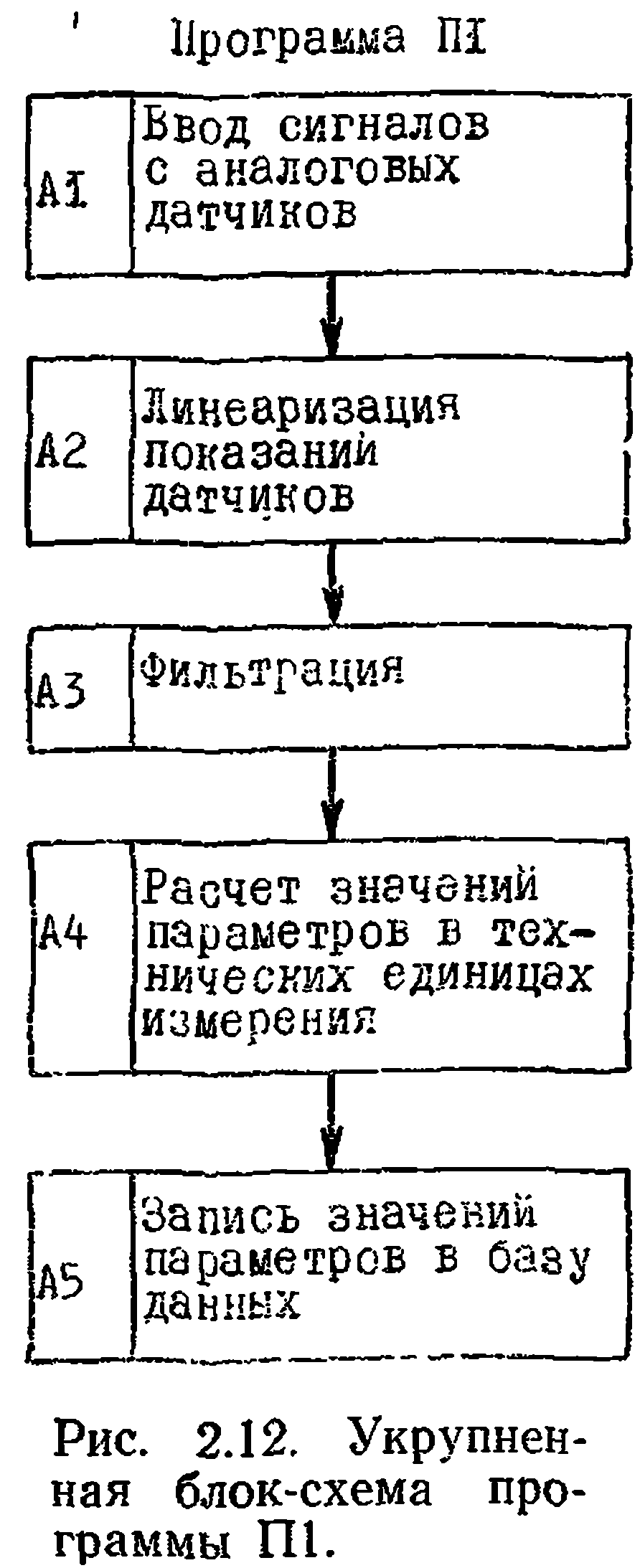
У § 2.3 було наведено приклад алгоритмізації задачі регулювання температури теплообмінника. Продовжуючи розгляд цього прикладу, припустимо, що на етапі програмування в результаті структуризації цього алгоритму виникло п'ять програм (табл. 2.1), між якими розподілився весь алгоритм. Кожна з цих програм по-своєму взаємодіє з операційною системою: має свій пріоритет, режим виконання і періодичність виклику. В описуваному прикладі чотири програми (П1, П2, ПЗ і П4) працюють (виконуються) періодично, а програма П5 на вимогу оператора. Взаємодія між зазначеними програмами за викликом відсутня, тобто одна програма не викликає іншу. Однак інформаційний взаємозв'язок між програмами з передачі даних існує (табл. 2.2). Елемент даних може бути для програми вхідним чи вихідним. . Перше означає, що програма використовує результат обробки іншої програми, а вихідними є дані, одержувані в результаті виконання даної програми.
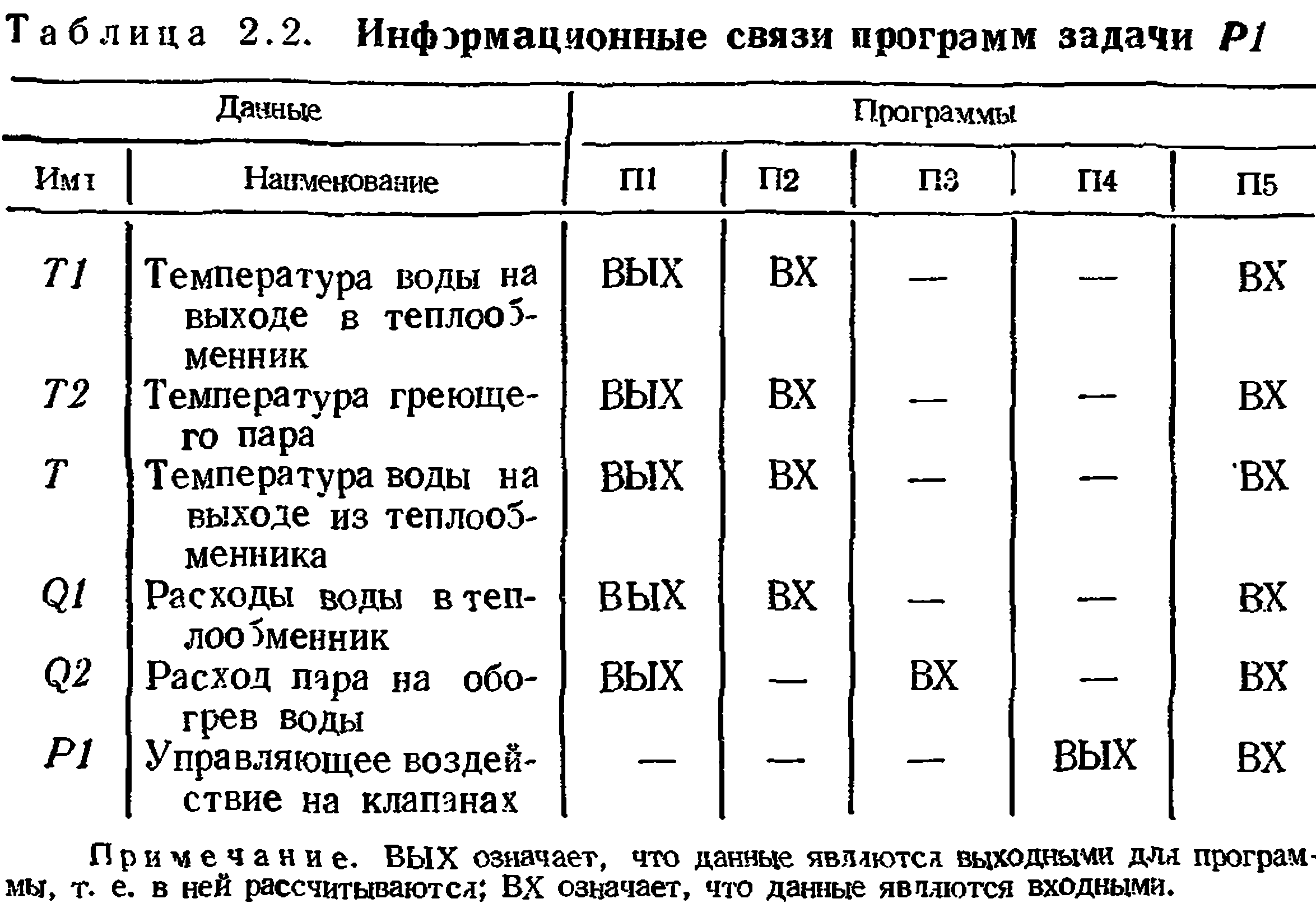
З табл. 2.2 видно, наприклад, що значення витрати пара розраховується в програмі П1, а використовується програмами ПЗ і П5.
Ще раз відзначимо, що в багатьох випадках не існує однозначної відповідності між розподілом алгоритму на етапі алгоритмізації на підалгоритми або укрупнені блоки і діленням того ж алгоритму на частини, що виділяються в самостійні програми при структуризації програм. Для ілюстрації сказаного на рис. 2.12 показана укрупнена блок-схема програми П1. Вона об'єднує в собі блоки А1 і А2 укрупненої блок-схеми підалгоритма А, показаного на рис. 2.5.
г) Проектування й виготовлення програмного забезпечення АСУ ТП
Ще 10-15 років тому, коли зароджувалося застосування ЕОМ для управління технологічними процесами, все по АСУ ТП розроблялося індивідуально для кожного об'єкта. У міру накопичення досвіду і розуміння вимог до ПЗ АСУ ТП розвивалася уніфікація окремих елементів ПЗ. Сучасний стан проблеми створення ПО АСУ конкретними об'єктами можна охарактеризувати таким чином.
Операційні системи. Випущені нашою промисловістю ЕОМ для АСУ ТП (наприклад, типів М-6000, М-7000, СМ-1, СМ-2, СМ-3, СМ-4) поставляються з набором операційних систем. У відповідності з вимогами, що пред'являються в конкретній системі управління до складу пристрої ЕОМ та регламенту виконання програм при проектуванні АСУ ТП, вибирається та чи інша ОС з безлічі можливостей.
Система управління базою даних. Уніфікація СУБД для АСУ ТП в даний час не завершена. Поряд з використанням СУБД, наявних у складі ПЗ ЕОМ, для окремих об'єктів (або груп об'єктів) продовжуються розробки індивідуальних СУБД. По-видимому, в найближчі роки буде створено набір СУБД, що дозволяє скоротити індивідуальні розробки і використовувати в більшості випадків готові рішення.
Програми зв'язку оператора з ОС і даними зазвичай входять до складу операційної системи і (або) СУБД. Їх уніфікація тільки починається, і комплексно вони почали розглядатися лише останнім часом. Тому для конкретних АСУ ТП їх розробка зараз ведеться індивідуально.
Функціональні програми. Ця частина ПО АСУ ТП в даний час найменш уніфікована. Роботи в цьому напрямі ведуться дуже інтенсивно, і зараз створюються засоби автоматизованої генерації (компоновки) функціональних програм.
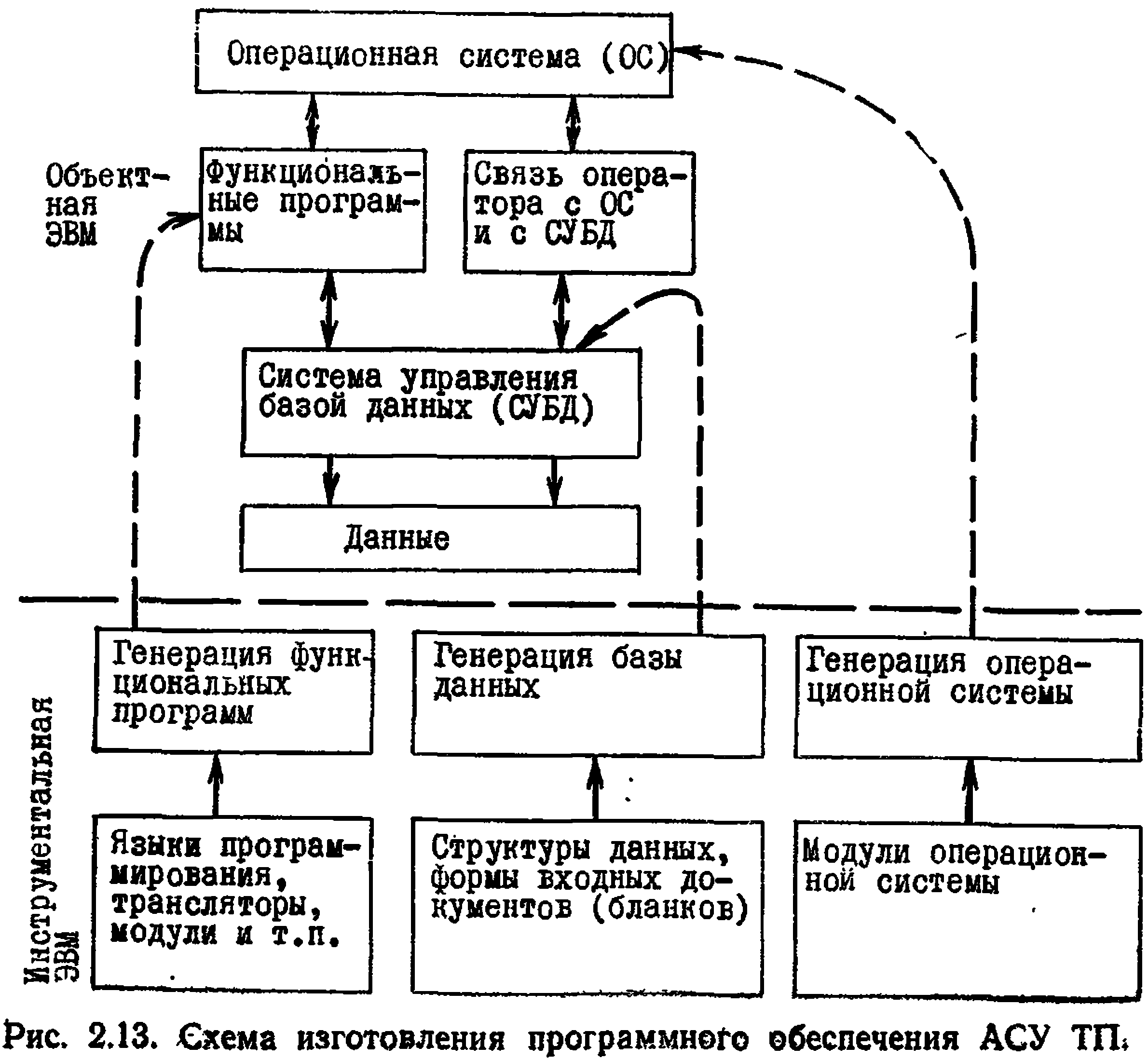
Процес розробки і виготовлення ПО АСУ ТП є дуже трудомістким і відповідальним. У цьому процесі широко використовуються можливості ЕОМ для автоматизації окремих етапів робіт. Наявність трансляторів дозволяє вести програмування окремих модулів на тій чи іншій мові програмування. Програма генерації ОС дозволяє скомпонувати (забезпечити) для конкретного об'єкта потрібний набір функцій операційної системи. Є засоби генерацій функціональних програм з окремих модулів і ін Схема виготовлення програмного забезпечення АСУ ТП показана на рис. 2.13.
Роботи по генерації операційної системи, функціональних програм і бази даних виконуються поза реального часу, тобто на етапі розробки та виготовлення ПЗ АСУ ТП. Їх можна виконувати в обчислюваних центрах науково-дослідних чи проектних організацій. Та ЕОМ, на якій вони виконуються, називається інструментальний на відміну від об'єктної ЕОМ, яка працює в складі АСУ ТП під час експлуатації.
Роботи зі створення функціональних програм проводяться в два етапи. На першому етапі створюється необхідний набір програмних модулів, а на другому здійснюється збірка (компонування) функціональних програм з модулів. Для виготовлення модулів використовуються мови програмування (Асемблер, фортан, АЛГОЛ, Кобол) і відповідні транслятори. Використання модуля на другому етапі припускають наявність відомостей про модуль. Ці дані зазвичай оформляються у вигляді так званих паспортів, які, по-перше, містять характеристики модуля в цілому: ім'я модуля, тип ЕОМ і операційної системи, для яких він призначений, число параметрів на будівництва і т. д. По-друге, паспорти відображають характеристики кожного параметра настройки: призначення (вхідний або вихідний), тип (цілий, речовинний або символьний) і т. д.
Для складання завдання на генерацію функціональних програм з модулів використовують спеціальні мови. Розробники прагнуть, щоб цими мовами могли скористатися не тільки програмісти, але й спеціалістів з автоматизації виробничих процесів.
Роботи з формування бази даних включають в себе етапи проектування структури даних, форми вхідних документів, тобто форм бланків, на яких будуть записані дані, власне заповнення бланків, контроль даних та їх завантаження в ЕОМ.
До недавнього часу, як правило, в якості інструментальної машини використовувалася та ж ЕОМ, що і в якості об'єктної, наприклад М-6000, М-7000, СМ-1 та ін. Однак в останні роки різко зросла (і продовжує рости) число розроблюваних АСУ ТП. Накопичений досвід розробок показує, що більшу частину підготовчих робіт з виготовлення ГЮ можна виконати не на об'єктної, а на універсальній ЕОМ середньої або великої потужності, наприклад, типів ЕС-1022, ЄС-1033, М-4030 та ін Це дозволяє підвищити продуктивність праці фахівців науково-дослідницьких і проектних організацій.
2.5. ПЕРСПЕКТИВИ РОЗВИТКУ «ІНДУСТРІАЛЬНИХ» МЕТОДІВ СТВОРЕННЯ МАТЕМАТИЧНОГО І ПРОГРАМНОГО ЗАБЕЗПЕЧЕННЯ
Як уже зазначалося, на першому етапі розвитку АСУ ТП і математичне, і програмне забезпечення кожної системи розроблялися індивідуально, у вигляді відповідних монолітних матеріалів, складених спеціально для даної системи. Найменші модифікації, зміни або доповнення таких матеріалів потребували радикальної переробки відповідного виду забезпечення, в зв'язку з чим надзвичайно і утруднялося багаторазове їх використання.
У міру збільшення числа розроблювальних АСУ ТП і розширення їхніх функцій трудомісткість робіт по підготовці математичного та програмного забезпечення зростала, і стало очевидним недосконалість першоначальної форми подання документації на програмне забезпечення АСУ ТГ у вигляді єдиної монолітної програмної системи . Програмне забезпечення АСУ ТГ стали готувати у вигляді окремих, функціонально закінчених елементів - програмних модулів (ПМ), з яких можна збирати програмне забезпечення конкретних проектованих систем управління. Надалі такий підхід був поширений і на алгоритми. У результаті в даний час намітилися такі тенденції розвитку технології підготовки математичного та програмного забезпечення АСУ ТП.
На основі узагальнення даних по вже існуючим і проектованим АСУ ТП створюється алгоритмічна структура узагальненої системи. При цьому існуюча раніше монолітна документація по математичному забезпеченню конкретних АСУ ТП (образно висловлюючись, їх «алгоритмічні портрети») розчленовується на окремі, функціонально закінчені елементи - 80 алгоритмічні модулі (монолітний «алгоритмічний портрет» даної АСУ ТП При цьому замінюється «мозаїчним портретом»). Отримані шляхом узагальнення досить численних розробок конкретних АСУ ТП алгоритмічні модулі сортуються, і на їх основі створюється типова алгоритмічна база АСУ ТП (формується як би абстрактний мозаїчний «алгоритмічний портрет» узагальненої АСУ ТП). Така алгоритмічна база в даний час створена в вигляді збірників алгоритмічних модулів, типових для АСУ ТП провідних галузей промисловості. В алгоритмічній базі АСУ ТП, утвореною всією сукупністю алгоритмічних модулів, можна виділити «загальнопромислове ядро», в яке входять алгоритмічні модулі, що повторюються в більшості АСУ ТП незалежно від їх галузевої приналежності.
Алгоритмічна база АСУ ТП є основою для побудови відповідної програмної бази АСУ ТП, створюваної у вигляді єдиної бібліотеки програмних модулів (або сукупності таких бібліотек за галузями промисловості). Структура програмної бази відповідає структурі алгоритмічної бази АСУ ТП: алгоритмічному модулю (або їх окремої групи) відповідає один або кілька програмних модулів. Образно висловлюючись, будується «мозаїчний програмний портрет» узагальненої АСУ ТП, повторюючий риси «алгоритмічного портрета», і хоча окремі елементи алгоритмічної та програмної «мозаїк» можуть строго не збігатися, «програмний портрет» в цілому є відображенням «алгоритмічного портрета». Загальна схема програмної бази повторює схему алгоритмічної бази АСУ ТП, тому першою (і найбільш важливою) завданням є побудова загальнопромислового «ядра» програмної бази. Програмна база АСУ ТП створюється відразу на машинних носіях у вигляді бібліотеки, забезпеченою сервісними програмами, що дозволяють здійснювати введення. Редагування і заміну програмних модулів, встановлювати зв'язки між ними, здійснювати документування і т. д.
Наступним кроком до вдосконалення технології підготовки програмного забезпечення АСУ ТП являється створення систем генерації програмного забезпечення. Необхідність застосування систем генерації програмного забезпечення викликана не тільки прагненням підвищити продуктивність праці розробників АСУ ТП, але і розвитком самих систем управління процесами. У міру розвитку АСУ ТП, розширення їхніх функцій обсяг ПО безперервно зростає і в розвинених АСУ в даний час обчислюється десятками тисяч машинних команд. Збірка і комплексна відладка таких об'ємних програмних систем звичайними методами стає практично неможливою, що істотно гальмує впровадження і подальший розвиток АСУ ТП. Системи генерації ПО принципово дозволяють перевести підготовку ПО на індустріальну основу шляхом автоматизації процесу складання великих програмних систем з окремих програмних модулів та здійснення прив'язки генерованої програмної системи до заданої конфігурації операційної системи керуючого відчислюю чого комплексу (КВК) проектованої АСУ ТП. При цьому істотно скорочуються помилки при формуванні спеціального ПЗ АСУ ТП і спрощується процес його комплексного налагодження на об'єкті.
Слід зазначити специфіку задачі автоматизації процесу підготовки ПЗ АСУ ТП. Оскільки АСУ ТП надзвичайно різноманітні (переважна більшість їх відрізняється один від одного функціональної, алгоритмічного, технічної та іншими структурами, тобто практично не зустрічається строго однакових АСУ ТП), відповідно різноманітні і конфігурації їх програмних комплексів. Тому завдання автоматизованої генерації ПО не схожа на задачу, вирішувану автоматичної потокової лінією при масовому виготовленні однотипних деталей або їх складанні у однакові вироби. Скоріше це аналог задачі, розв'язуваної верстатами з числовим програмним керуванням (ЧПК). Аналогічно тому, як верстату з ЧПК можна задати програму виготовлення потрібної деталі (і потім верстат відпрацює завдання), системі генерації можна задати програму збірки функціональної програмної системи, відповідну функцій проектованої АСУ ТП і прийнятої конфігурації її УВК; система генерації при цьому здійснить збірки СПО проектованої АСУ ТП і узгодження її із заданою ОС.
Найпростіші системи генерації являють собою надбудову над бібліотекою програмних модулів, її подальшим розвитком. Забезпечивши бібліотеку вхідною мовою, на якому можна описати необхідну конфігурацію проектованої програмної системи (з складу модулів, що зберігаються в бібліотеці), заданої маси вхідних величин, що підлягають обробці проектуючої програмною системою, задану дисципліну обробки інформації та необхідні характеристики ОС УВК, додавши до бібліотеки редактор зв'язків, отримаємо найпростішу систему генерації, яка зможе зібрати задану конфігурацію спеціального ПЗ проектованої АСУ ТП і видати відповідну програмну документацію.
Інший клас систем генерації ПО утворюють параметрично настроюються системи. Вони включають в себе власну бібліотеку з обмеженого набору уніфікованих програмних модулів. На вхідній мові системи, доступній інженеру-проектувальнику, описуються масиви вхідних і вихідних величин, задані правила обробки інформації та дисципліна обслуговування. Система формує базу даних з вхідних і вихідних величин і параметрів настройки уніфікованих модулів, що забезпечують рішення заданих завдань з необхідною дисципліною. Система формує фактично не виконавчу програму, а лише базу даних; у процесі виконання завдань використовуються уніфіковані програми внутрішньої бібліотеки системи (в так званому інтерпретує режимі). У зв'язку з цим параметрично настроюються системи допускають широкі можливості коригування програмного забезпечення в період впровадження і експлуатації АСУ ТП.
Наступний етап розвитку технології підготовки математичного і програмного забезпечення АСУ ТП - створення систем автоматизованого проектування (САПР) цих видів забезпечення АСУ ТП. Впровадження таких САПР в практику означає по суті кардинальний перехід до промислових (індустріальних) методів підготовки математичного та програмного забезпечення АСУ ТП. В якості прикладу розглянемо принципи побудови однієї з САПР математичного та програмного забезпечення АСУ ТП.
Загальна схема функціонування САПР математичного забезпечення (МЗ) та програмного забезпечення (ПО) наведена на рис. 2.14 Початкове завдання на проектування вводиться в систему за допомогою підсистеми формалізації завдання з пульта інженера-проектанта. Базою САПР є банк даних і методів (БДМ), в якому зберігаються бібліотеки алгоритмічних і програмних модулів, а також програмні реалізації математичних методів, використовуваних при аналізі, дослідженні та налаштування алгоритмів і програм АСУ ТП.
Система автоматизованого проектування дозволяє вирішувати наступні завдання:
1) за заданою у технічному завданні (ТЗ) функціональній схемі проектованої АСУ ТП формувати її алгоритмічну структуру з набору алгоритмічних модулів, що зберігаються в БДМ; при необхідності формувати відсутні алгоритмічні модулі з математичного опису відповідної задачі, запроваджуваному в систему інженером-проектантом (при цьому одночасно проводиться доповнення бібліотеки алгоритмічних модулів в БДМ);
2) формувати програмну модель спроектованої алгоритмічної структури з набору програмних модулів, що зберігаються в БДМ; при необхідності формувати відсутні програмні модулі по відповідних модулям алгоритмічної структури (при цьому одночасно проводиться доповнення бібліотеки програмних модулів в БДМ);
3) проводити аналіз, відпрацювання та апроксимацію спроектованої алгоритмічної структури АСУ ТП для подальшого формування робочої моделі програмного забезпечення АСУ ТП;
4) формувати робочу програмну модель проектуючої АСУ ТП по спроектованої алгоритмічній структурі шляхом доцільної апроксимації вихідних алгоритмів уніфікованими програмними модулями. Процес формування робочої моделі включає організацію бази даних програмної системи проектованої АСУ ТП, уточнення конфігурації технічної структури УВК і прив'язку до його операційній системі;
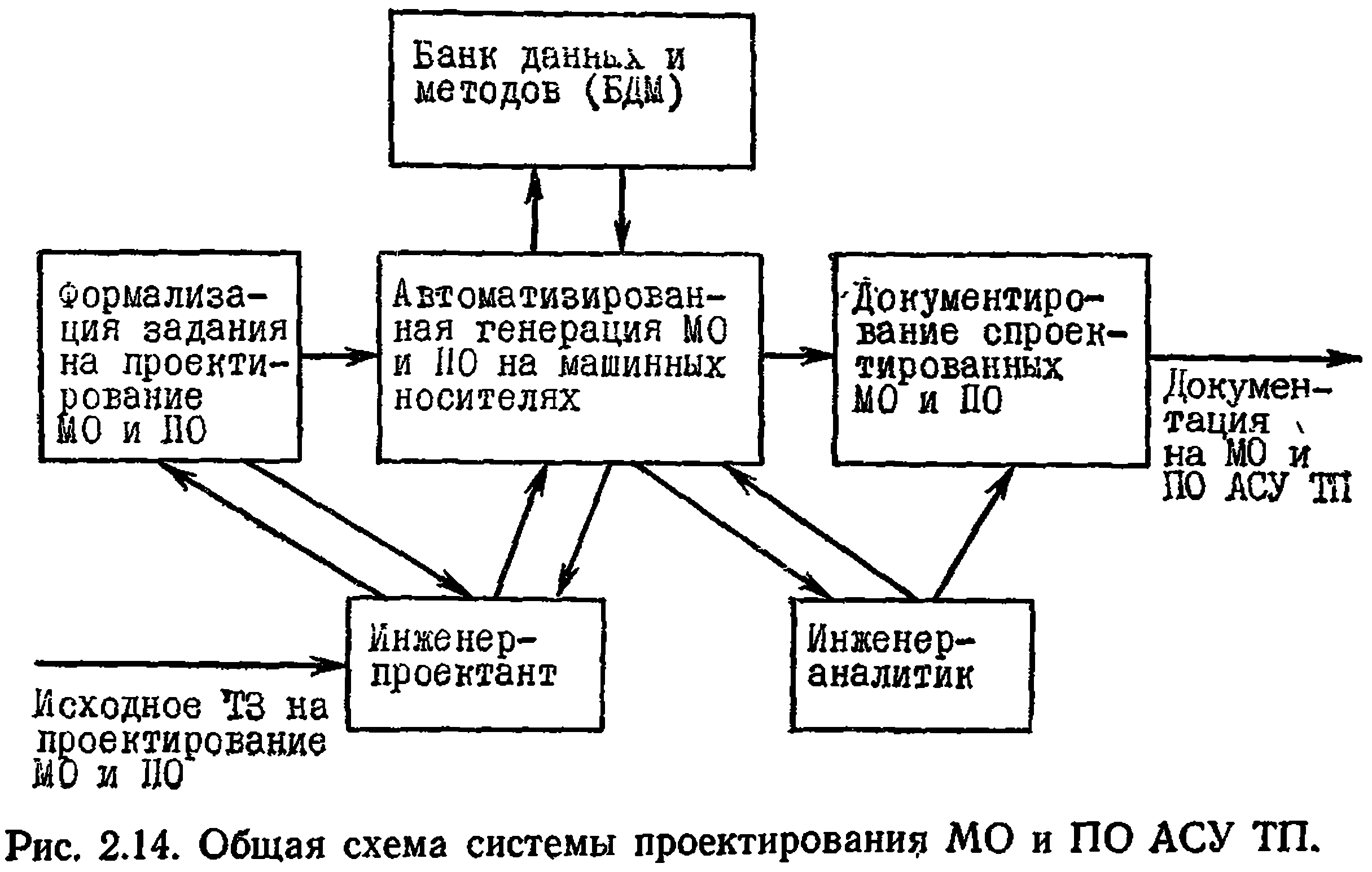
5) здійснювати настройку робочої програмної моделі проектованої АСУ ТП і перевірку її функціонування;
6) здійснювати документування спроектованих алгоритмів і програмного забезпечення АСУ ТП.
Практично САПР математичного та програмного забезпечення АСУ ТП включає в себе ряд підсистем, взаємозв'язаних в єдиний людино-машинний комплекс. Зокрема, передбачаються підсистеми проектування алгоритмічної структури АСУ ТП, її моделювання, формування та налаштування робочої моделі, документування. Всі підсистеми об'єднуються єдиною базою даних, яка є складовою частиною БДМ. В системі послідовно вирішуються перераховані вище завдання, а кінцевою метою функціонування системи є побудова діючої робочої моделі МЗ проектованої АСУ ТП, з якої зчитуються і документуються відповідні алгоритми та повне ПО.
Глава третя
ВЗАЄМОДІЯ «ЛЮДИНА - МАШИНА» В АСУ ТП
3.1. ЛЮДИНА-ГОЛОВНА ЛАНКА В КОНТУРІ АСУ ТП
В існуючих системах управління технологічними об'єктами на людину покладається виконання найрізноманітніших операцій. Іноді він виступає в ролі виконавчого механізму, що виконує нескладні операції по сигналах командного пристрою або іншої людини, а іноді здійснює найбільш відповідальні, складні і тонкі операції по управлінню цілими технологічними комплексами. Типові також випадки, коли людина грає роль контролера, беручи участь у процесі вимірювання і виконуючи різні операції з метою отримання інформації про поточний стан деяких технологічних параметрів (відбирає пробу розплавленого металу з мартенівської печі, виконує експрес-аналіз в лабораторії для визначення вмісту вуглецю в металі і т. д.).
В міру ускладнення виробництва, підвищення інтенсивності і напруженості протікання технологічних процесів і, нарешті, в результаті різкого підвищення рівня автоматизації істотно змінюється роль людини в сучасних промислових системах управління.
Накопичений досвід дозволяє стверджувати, що в майбутніх автоматизованих системах управління виробництвом в одних випадках людина буде витіснятися автоматичний пристроями з контуру управління (контролери, виконавці), а в інших, навпаки, його роль буде зростати (оператори-технологи) , так як людина залишиться в них найголовнішим вирішальною ланкою. Внаслідок цього однією з центральних проблем створення АСУ ТП є реалізація оптимального взаємодії «людина - машина», тобто така організація потоків інформації до людини і командної інформації від нього, при якій забезпечується найкраще, найбільш повне використання всіх його творчих можливостей. Тому при розробці АСУ ТП і відповідних технічних засобів взаємодії «чоловік - машина» для таких систем управління необхідно враховувати психофізіологічні особливості і можливості людини, а ті конструктивні елементи, через які здійснюється взаємодія (індикатори показують пристроїв для передачі інформації людині, рукоятки командних пристроїв для передачі керуючих впливів від нього і т. д.), повинні бути зручні людині, тобто повинні бути такими, щоб від людини не було потрібно надмірного напруження уваги або фізичних зусиль, зайвих утомливих операцій з налаштування або експлуатації і т. д. До цього ж переліку потрібно віднести і вимоги комфорту для оптимальної життєдіяльності людини на робочому місці.
Необхідно відзначити, що навіть при повній заміні контролерів-спостерігачів і виконавців автоматичними пристроями діяльність людини в АСУ ТП залишається дуже напруженою і відповідальною. Він повинен постійно перебувати в робочій зоні операторського пункту (диспетчерської) і взаємодіяти з різними інформаційними та командними пристроями. Сприймаючи інформацію, що надходить з вимірювальних приборів, мнемосхеми, дисплеїв та інших пристроїв, чоловік зобов'язаний безпомилково аналізувати її, своєчасно приймати рішення по управлінню і виконувати їх з допомогою різного роду командних пристроїв (кнопок, перемикачів, клавіатури) . З цього, зокрема, випливає, що робоче місце людини в АСУ ТП повинно бути оснащено відповідними засобами взаємодії «людина - машина».
Як ланка переробки інформації людина подібна універсальному обчислювальному пристрою. Поступаючись обчислювальних машин у швидкодії, він може виконувати операції, недоступні їм: вирішувати проблеми інтуїтивним способом, орієнтуватися при неповній інформації в непередбачених ситуаціях, приймати принциповим нові, творчі рішення і т. п.
Зазвичай людина - найменш точний елемент в цепі управління, що особливо важливо, коли цей ланцюг через нього замикається. Тому будь-які заходи, застосовуючи з метою підвищення точності роботи людина, істотні для підвищення результуючої точності всієї системи. До таких ефективним заходам відносяться: чітке визначення функцій виконуваних людиною; узгодження характеристик системи і людини; раціональна конструкція засобів представлення інформації і органів управління; оптимальне розташування їх на панелях щитів і пультів; спеціальні тренування персоналу ; організація режиму роботи і умов праці та ін.
По надійності роботи людина також значною мірою поступається багатьом іншим ланкам АСУ. Він швидко стомлюється, якість його роботи істотно залежить від великої кількості факторів (у тому числі психологічних). Однак за сприятливих умов роботи завдяки ряду значних переваг перед автоматичними керуючими пристроями (можливість контролю обстановки своїми органами почуттів, передбачення подій, здатність до навчання, пристосування до зміни умов і ін.) введення людини в систему управління докорінно покращує надійність її роботи. Значний ефект у забезпеченні надійності дає використання людини в якості дублера замкнутих систем управління.
При розгляді питань ефективного застосування творчих можливостей людини як головної ланки системи управління передусім виникає задача оптимального розподілу функцій між людиною і машиною. Очевидно, що техніці, автоматам, машинам слід доручати ті операції, які вони заздалегідь роблять краще людини, а робота всіх решта частин системи повинна бути підпорядкована завданню оптимального обслуговування людини.
На автоматичні пристрої АСУ ТП покладаються насамперед повторювані, рутинні дії, зв’язані з досягненням таких відносно простих цілей управління, як регулювання технологічних параметрів на заданому рівні або за заданою програмою, автоматичний захист по формалізованим алгоритмів та т.д. Із зростанням «розумових», обчислювальних можливостей машин і ступеня вивченості технологічних процесів на автомати покладаються більш тяжчі, майже «творчі» дії, пов'язані з оптимізацією технологічного процесу на тих чи інших стадіях його протікання. До таких дій належать обчислення і техніко-економічних показників, розрахунок оптимальних траєкторій в перехідних режимах та інші функції, які піддаються формалізації і мають відповідне математичне і технічне забезпечення.
На людину в цих системах покладаються функції, які або поки взагалі не можна доручати автоматам (немає формалізованого опису функції, немає апаратури, здатної її виконати), або автоматичне виконання яких поки не виправдано економічно. Крім того, людина завжди виконує функцію резерву на випадок відмови автоматів.
Взаємодія людини і техніки може бути організована по-різному в залежності від завдань, поставлених перед системою, можливостей обраних апаратурних засобів і ролі, покладеної на людину в даній системі управління. За останньою ознакою всі АСУ ТП умовно можна поділити наступним чином:
1) системи, в яких людина, здійснюючи функції управління, є в той же час виконавчим елементом і навіть джерелом енергії, безпосередньо впливає на технологічне обладнання об'єкта;
2) системи, в яких людина управляє зовнішніми джерелами енергії, домагаючись оптимального функціонування об'єкта; тут істотна залежність інтенсивності результуючого впливу джерела енергії на процес від ступеня керуючої дії людини;
3) системи автоматичного управління, виконуючі функції управління відповідно до деяким наперед заданим законом функціонування; людині відводиться роль ланки, що здійснює спостереження за ходом процесу і вводящої коригувальної дії;
4) системи, в яких людина, крім виконання функцій спостереження за поведінкою системи, вводить в неї необхідну інформацію.
Відзначимо, що практично всі реальні АСУ ТП представляють собою комбінації систем розглянутих видів.
Людину в АСУ ТП найчастіше називають оператором або диспетчером. Визначення понять «оператор» і «диспетчер» не мають чітких меж. Розглянувши ієрархічну структуру управління, зауважимо, що людина може бути диспетчером по відношенню до підпорядкованому йому оператору і в свою чергу оператором по відношенні до вищестоящого диспетчеру. Зазвичай вважають, що оператор керує технологічним процесом не посередньо або за допомогою спеціальних засобів, прямо беручи участь у виробництві предметів, речовин або енергії. У той же час диспетчер за допомогою своїх технічних засобів і через інших людей спрямовує хід такого виробництва, впливаючи на нього побічно, наприклад, шляхом оперативного перерозподілу ресурсів, заданий і т. п.
За способом представлення інформації для сприйняття її людиною системи умовно поділяються таким чином:
1) у яких інформація видається людині в абстрактній формі (у вигляді цифр, формул, показань стрілкових контрольно-вимірювальних приладів і т.д.);
2) в яких інформація відтворюється в графічній формі (у вигляді графічних функціональних залежностей, діаграм на реєструючих приладах і т.д.);
3) з поданням інформації в образотворчій формі (у вигляді мнемосхем, схем територіального розміщення і т. д.);
4) в яких інформація видається у вигляді буквено-цифрових позначень, текстів (на світлових табло, електронно-променевих трубках, стрічках автоматичних друкуючих пристроїв і т. д.).
Зауважимо, що в більшості реальних АСУ ТП використовують не одну, а дві-три чи навіть всі чотири форми подання інформації людині.
Загальна ефективність функціонування АСУ технологічних процесом або виробництвом, як відомо, залежить від досконалості технологічного устаткування та системи автоматизації, рівня професійної майстерності оператора, взаємної пристосованості людини і машини як ланок єдиної системи управління. Останнє означає, зокрема, що інформацію про стан керованого об'єкта слід представлять оператору в такій формі, яка найбільш повно відповідає закономірностям сприйняття і дальшої переробки її людиною. У зв'язку з цим конструювання засобів представлення інформації на основі тільки технічних передумов, як це ще нерідко буває, не може забезпечити надійної та високоефективної роботи оператора. Тут необхідно залучення даних інженерної психології, ергономіки, фізіології, гігієни. Важливе значення має також застосування спеціальних методів художнього конструювання і технічної естетики.