

Задание для самостоятельной работы (РГР) АВТОМАТИКА _2014
.pdf3.Объясните принцип действия системы автоматического регулирования частоты вращения двигателя внутреннего сгорания.
4.Объясните принцип действия систем автоматического регулирования направления движения машин и их рабочих органов.
5.Каким образом работают схемы автоматического управления установок для раздачи кормов животным, уборки навоза, поддержания заданной температуры и влажности воздуха?
6.Каковы особенности пуска электропривода сепаратора и схема для его осуществления?
7.Объясните принцип действия устройств для отделения инородных примесей от массы стебельчатого корма.
8.Объясните принцип действия электрической схемы управления тельфером.
2. Задания и методические указания
по выполнению контрольной работы.
ОБЩИЕ УКАЗАНИЯ Учебным планом для студентов-заочников по курсу «Автоматика»
предусмотрено выполнение расчетно-графической работы.
Для выполнения контрольных работ студенту необходимо изучить соответствующую литературу, решить задачи и упражнения, приведенные в рекомендованной литературе, чтобы имeть полное представление по рассматриваемому вопросу.
В начале каждой работы должно быть указано задание, которое выдается каждому студенту индивидуально и без которого контрольная работа не рецензируется.
При выполнении контрольного задания необходимо соблюдать следующие правила:
11
а) в работе должны быть переписаны условия задачи соответственно решаемому варианту;
б) выполнение каждой работы должно сопровождаться краткими объяснениями, необходимыми обоснованиями, подробными вычислениями;
в) при вычислении каждой величины нужно указать, какая величина определяется;
г) решение задачи надо произвести сначала в общем виде (формулы в буквенных выражениях) и после необходимых преобразований подставлять соответствующие числовые значения;
д) необходимо указать размерность как всех заданных в условиях задачи величин, так и полученных результатов;
е) графический материал желательно выполнять на миллиметровой бумаге;
ж) в конце работы необходимо дать перечень использованной литературы, подписать ее и указать дату окончания работы.
На экзамене контрольные работы сдают экзаменатору (без контрольных работ студент к экзамену не допускается).
3. Задание для контрольной (расчетно-графической) работы. Пример решения
Задача содержит вопросы по исследованию автоматических систем регулирования на определение их устойчивости по различным критериям.
Задача1.
Автоматическая система регулирования — замкнутая АСУ
(автоматическая система управления) состоит из 3-х последовательно соединенных звеньев. Второе звено охвачено местной обратной связью.
Определить устойчивость системы по заданному критерию.
Методика решения задачи
12

Пусть передаточные функции звеньев рис. 1 имеют вид:
1. W |
|
= |
2 |
|
( р )1 |
|
|||
4 р 2 4 р 1 |
||||
|
|
|
2.w ( р ) 2 = р2 1
3.W ( р )3 = 2р
Передаточная функция местной обратной связи:
W ( р)ос |
Х ВЫХ ( Р)ОС |
= -1 |
|
||
|
Х ВХ ( Р)ОС |
|
Изображаем схему алгоритмической структуры автоматической системы регулирования.
Зная передаточные функции звеньев, несложно получить общую передаточную функцию разомкнутой АСУ—W(p)paз, а затем получить и передаточную функцию замкнутой АСУ —
W(p)зам.
w ( р) зам |
= |
|
W( p) раз |
|
1 W( р) раз |
||||
|
|
|||
Здесь в знаменателе знак (+) при отрицательной обратной связи, а знак
(-) при положительной обратной связи.
Находим общую передаточную функцию для разомкнутой АС
(автоматической системы), для чего имеющуюся замкнутую АС разомкнем
(этот разрыв можно сделать между любыми другими звеньями) в точке Q.
В этой задаче местная обратная связь отрицательная W ( р)ос = -1 и
передаточная функция второго звена определяется уравнением:
|
|
|
|
|
|
2 |
|
|
|
|
|
|
W( p)2 |
|
|
|
|
|
|
|
|
2 |
|
W ( р)2;ос = |
|
|
|
p |
1 |
|
|||||
1 W( p)2 |
W( p)oc |
1 |
|
2 |
|
|
(1) |
|
p 1 |
||
|
|
|
|
p |
1 |
|
|
||||
В случае положительной обратной связи в знаменателе между слагаемыми останется знак «минус». Общая передаточная функция для
последовательной разомкнутой системы будет равна:
13

W ( р ) раз =W ( р )1 W( p)2;oc |
W( p)3 |
2 |
|
2 |
2 |
|
|
8 |
||
|
|
|
|
|
|
|
|
|||
4 p 2 4 p 1 |
p 1 p 4 p 4 |
8 p3 5 p 2 p |
||||||||
|
|
|||||||||
Определение устойчивости по критерию Найквиста
Критерий Найквиста позволяет судить об устойчивости замкнутой
системы по комплексной частотной характеристике разомкнутой системы.
Находим комплексный коэффициент передачи для разомкнутой АС,
подставляя j вместо оператора р:
|
|
|
W(j |
)= |
|
|
8 |
. |
|
|
|
|
|
|
|
|
|||
|
4( j |
)4 |
8( j )3 5( j )2 j |
||||||
Так как j= |
|
, то j2= -1, |
j3= -j, то j4= + 1, |
||||||
1 |
|||||||||
тогда W(j |
)= |
|
8 |
|
|
|
. |
|
|
|
|
|
|
|
|||||
(4 4 5 2 ) |
j( |
8 |
3 ) |
|
|||||
Чтобы представить комплексный коэффициент передачи в виде комплексного числа, имеющего действительную R( ) и мнимую J( ) части,
умножим и разделим полученный результат на сопряженное знаменателю комплексное число
(4 |
4 -5 |
|
2)-j( |
-8 |
3) |
|
|
и получим: |
|
|
|||
|
|
32 |
2 |
40 |
|
|
|
|
8 |
64 |
2 |
|
|
W(j )= |
|
|
|
|
|
j |
|
. |
|||||
|
|
|
|
|
|
|
|
|
|
||||
16 6 |
24 |
|
4 9 |
2 |
1 |
16 7 24 |
5 9 3 |
||||||
Давая различные значения частоте |
, находим координаты R( )и J( ) |
||||||||||||
точек годографа комплексного коэффициента передачи.
Лучше начинать нахождение координат точек годографа с характерных
точек, а именно: с точки при →0, при →∞, точек, в которых годограф
пересекает оси координат, а затем найти координаты промежуточных точек годографа, при необходимости можно найти экстремумы годографа.
При →0 получим
R( ) |
0 |
40; J ( ) |
0 |
. |
|
|
|
Это будет видно, если числитель и знаменатель J( ) разделить на .
14

Рис. 1. Схема алгоритмической структуры автоматической системы регулирования
Найдем координаты точек, которые являются местом пересечения годографа с осью абсцисс. Для этих точек координата по оси ординат равна
нулю, т. е. должно соблюдаться условие |
|
|
|
|
|
|
|||||
|
|
|
|
|
J( |
)=0. |
|
|
|
|
|
Если числитель J( ) равен нулю, то |
|
|
|
|
|||||||
|
|
|
|
|
64 |
2—8=0. |
|
|
|||
Решая это уравнение, находим все его корни |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
8 |
|
1 |
; |
|
|
1 |
; |
|
0,354; |
|
|
64 |
8 |
1,2 |
8 |
1 |
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
2 |
0,354. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Для решения используем только положительные значения корней =
0,354.
Подставляя найденное значение  в выражение для R( ), находим координату искомой точки на оси абсцисс:
в выражение для R( ), находим координату искомой точки на оси абсцисс:
R( ) |
|
32 |
0,3542 |
40 |
14,2. |
0,354 16 0,3546 24 0,3544 |
9 0,3542 1 |
||||
По такому же методу найдем координаты точек пересечения годографа с осью ординат.
Положив R( )=0, т. е. когда числитель равен нулю, находим корни уравнения:
15

|
2 |
|
|
2 |
40 |
|
|
|
|
|
32 |
40 |
0; |
1,25; |
|
1,25; |
|||||
|
|
|||||||||
|
|
32 |
1,2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1,12; |
2 |
|
1,12. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
J ( ) 1,12 |
|
|
|
|
64 |
1,122 |
8 |
|
|
|
0,79. |
|
16 |
1,12 |
7 |
24 |
1,12 |
5 |
9 |
1,12 |
3 |
1,12 |
|||
|
|
|
|
|
||||||||
При |
→∞ находим, разделив числитель и знаменатель, R ( ) и J( ) на |
|||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 |
40 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
R( |
) |
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
||
|
16 |
4 |
24 |
2 |
9 |
1 |
|
|
||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R( ) |
0, а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
64 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
J ( ) |
|
|
|
2 |
|
|
|
|
|
; J ( |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
) |
0. |
||||||
|
|
5 |
|
|
3 |
|
|
1 |
|
|
||||||||
|
16 |
24 |
9 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Итак, годограф при изменении  от 0 до +∞ имеет направление из бесконечности в III квадранте, пересекает ось абсцисс в точке с координатами [—14,2; j0], переходя во II квадрант, затем пересекает ось ординат в точке с координатами [0; j0,79J и далее, оставаясь в I квадранте,
от 0 до +∞ имеет направление из бесконечности в III квадранте, пересекает ось абсцисс в точке с координатами [—14,2; j0], переходя во II квадрант, затем пересекает ось ординат в точке с координатами [0; j0,79J и далее, оставаясь в I квадранте,
стремится к началу координат. Сведем полученные данные в табл. 1.
Таблица 1
|
R( ) |
J( ) |
0 |
-40 |
- ∞ |
0,1 |
-36,3 |
-67,4 |
0,354 |
-14,2 |
0 |
0,5 |
-6,4 |
+3,2 |
1,12 |
0 |
+0,79 |
+∞ |
0 |
0 |
Годограф будет иметь вид (рис. 2).
16
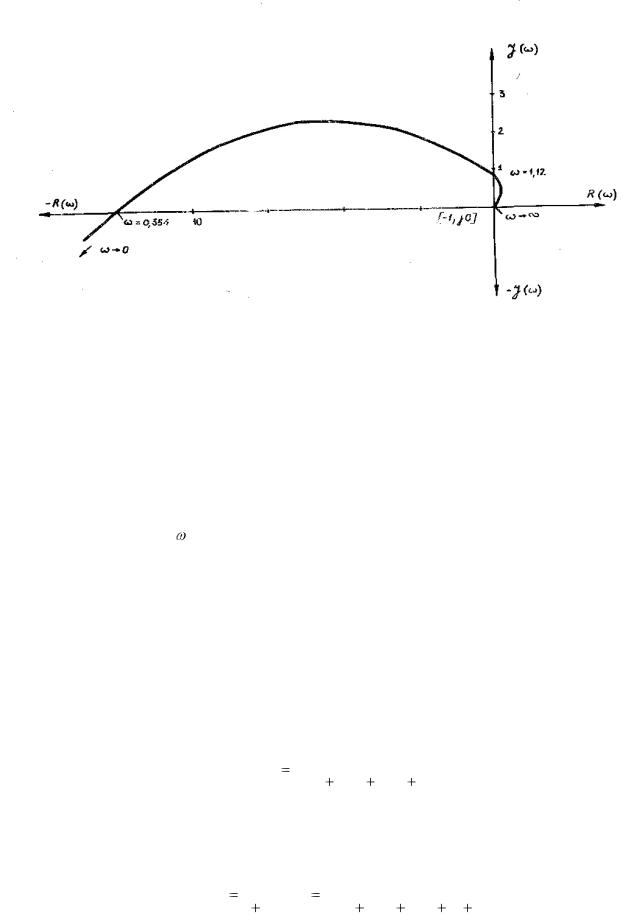
Рис. 2. Годограф к примеру решения задачи
Для обеспечения устойчивости автоматической системы в разомкнутом состоянии необходимо, чтобы комплексная частотная характеристика разомкнутой системы не охватывала точку (—1, j0).
Вывод. Замкнутая АС неустойчива, так как амплитудно-фазовая характеристика W(j ) разомкнутой системы охватывает точку с координатами (—1, j0).
Определение устойчивости АСУ по критерию Гурвица
Чтобы определить устойчивость АСУ по критерию Гурвица,
необходимо найти характеристическое уравнение для разомкнутой АСУ.
Передаточная функция для разомкнутой системы получена выше:
W( р) раз |
8 |
|
. |
|
|
||
4 р 4 8 р3 5 р 2 |
|
||
|
р |
||
Для замкнутой системы в случае отрицательной обратной связи передаточная функция будет равна
W( р) зам |
W( р) раз |
8 |
|
, |
|
1 W |
|
4 р 4 8 р3 5 р2 |
|
||
|
|
р 8 |
|||
|
( р) раз |
|
|
|
|
17

где знаменатель есть характеристическое уравнение для замкнутой АС,
т. е.
a0p4+a1p3+a2p2+a3p+a4=4p4+8p3+5p2+p+8=0.
Определитель Гурвица определяется следующим образом. Все коэффициенты от a1 до а4 располагаются по главной диагонали в порядке возрастания индексов. Вверх от главной диагонали в столбцах записываются коэффициенты характеристического уравнения с последовательно возрастающими, а вниз — с убывающими индексами. На месте коэффициентов» индексы которых больше 4, и меньше чем нуль,
проставляются нули: составляем определитель из коэффициентов харак-
теристического уравнения:
|
а1 |
а3 |
а5 |
а7 |
|
8 |
1 |
0 |
0 |
|
|
а0 |
а2 |
а4 |
а6 |
|
4 |
5 |
8 |
0 |
|
4 |
0 |
а1 |
а3 |
а5 |
|
0 |
8 |
1 |
0 |
|
|
|
|||||||||
|
0 |
|
0 |
а2 |
а4 |
|
0 |
0 |
5 |
8 |
Находим величины 2-го и предпоследнего (в нашем случае 3-го)
диагональных миноров.
|
|
|
|
|
а1 |
а3 |
а1 |
а2 |
а0 а2 |
8 |
1 |
|
8 5 4 1 40 4 36 0, |
|||||
|
|
|
2 |
|
а0 |
а2 |
4 |
5 |
|
|||||||||
|
|
а1 |
а3 |
|
а5 |
|
|
|
|
|
|
|
|
|
8 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
3 |
|
а а а |
а (а а а а ) а а2 |
|
4 5 |
8 |
1 (8 5 4 1) 8 82 |
|||||||||||
|
0 |
2 |
4 |
3 |
1 |
2 |
0 |
3 |
4 |
1 |
|
|
|
|
|
|||
|
|
0 |
а1 |
|
а3 |
|
|
|
|
|
|
|
|
|
0 |
8 |
1 |
|
36 |
512 |
|
476 |
0. |
|
|
|
|
|
|
|
|
|
|
|
|
||
По критерию Гурвица система устойчива только тогда, когда при а>0
все коэффициенты определителя а и все диагональные миноры определителя
n больше нуля.
Вывод. Так как диагональный минор 3 отрицательный, то согласно критерию Гурвица рассматриваемая АСУ неустойчива.
18
Исходные данные для решения задачи определения устойчивости
АСУ по критериям Найквиста и Гурвица. Номера вариантов выбираются по последним цифрам зачетной книжки. Для номеров от 50 до 99 необходимо вычесть 50 для получения номера варианта:
Вариант |
W(p)1 |
W(p)2 |
W(p)3 |
W(p)ос |
00 |
2/(4p2+5p+1) |
2/(p-1) |
2/p |
-1 |
01 |
2/(4p2+5p+1) |
3/(p-1) |
3/p |
-1 |
02 |
3/(4p2+6p+1) |
3/(p-1) |
2/p |
-1 |
03 |
2/(4p2+3p+1) |
3/(p-1) |
2/p |
-1 |
04 |
3/(4p2+3p+1) |
2/(p-1) |
1/p |
-1 |
05 |
3/(4p2+2p+1) |
2/(p+1) |
2/p |
-1 |
06 |
2/(4p2+5p+1) |
2/(p+1) |
3/p |
-1 |
07 |
2/(4p2+5p+1) |
1/(p+1) |
2/p |
-1 |
08 |
4/(4p2+2p+1) |
2/(p+1) |
1/p |
-1 |
09 |
2/(4p2+5p+1) |
3/(2p-1) |
2/p |
-1 |
10 |
1/(4p2+3p+1) |
3/(2p-1) |
3/p |
-1 |
11 |
2/(4p2+4p+1) |
2/(2p-1) |
2/p |
-1 |
12 |
2/(4p2+3p+1) |
1/(2p-1) |
1/p |
-1 |
13 |
3/(4p2+2p+1) |
2/(p+1) |
2/p |
-1 |
14 |
2/(4p2+p+1) |
1/(p+1) |
3/p |
-1 |
15 |
1/(4p2+5p+1) |
1/(p-1) |
4/p |
-1 |
16 |
4/(4p2+2p+1) |
3/(p+1) |
1/p |
-1 |
17 |
2/(4p2+5p+1) |
3/(p+1) |
3/p |
-1 |
18 |
2/(4p2+5p+1) |
2/(p-1) |
2/p |
-1 |
19 |
2/(4p2+5p+1) |
2/(p+1) |
1/p |
-1 |
20 |
3/(4p2+5p+1) |
2/(p-1) |
2/p |
-1 |
21 |
2/(4p2+Зp+1) |
1/(p-1) |
4/p |
-1 |
22 |
2/(Зp2+5p+1) |
1/(p-1) |
3/p |
-1 |
23 |
2/(4p2+p+1) |
2/(p-1) |
2/p |
-1 |
24 |
3/(p2+4p+1) |
2(p-1) |
2/p |
-1 |
25 |
2/(4p2+4p+1) |
2/(3p-1) |
3/p |
-1 |
26 |
3/(4p2+5p+1) |
1/(p-1) |
1/p |
-1 |
27 |
1/(4p2+5p+1) |
2/(p-1) |
1/p |
-1 |
28 |
2/(4p2+5p+1) |
2/(2p-1) |
2/p |
-1 |
29 |
1/(2p2+5p+1) |
2/(p-1) |
2/p |
-1 |
30 |
2/(4p2+3p+1) |
2/(p-1) |
1/p |
-1 |
31 |
4/(3p2+5p+1) |
2/(p+1) |
2/p |
-1 |
32 |
3/(p2+5p+1) |
2/(2p+1) |
3/p |
-1 |
33 |
2/(4p2+5p+1) |
4/(p-1) |
2/p |
-1 |
34 |
2/(4p2+5p+1) |
3/(p+1) |
1/p |
-1 |
35 |
3/(p2+5p+1) |
4/(p-1) |
2/p |
-1 |
36 |
2/(p2+4p+1) |
2/(p+1) |
3/p |
-1 |
37 |
2/(p2+p+1) |
1/(p+1) |
2/p |
-1 |
38 |
2/(4p2+p+1) |
1/(p-1) |
2/p |
-1 |
39 |
2/(4p2+3p+1) |
3/(р-1) |
3/p |
-1 |
40 |
2/(6p2+5p+1) |
2/(p-1) |
4/p |
-1 |
41 |
2/(p2+5p+1) |
1/(p-1) |
1/p |
-1 |
42 |
2/(p2+3p+1) |
2/(p-1) |
2/p |
-1 |
43 |
2/(2p2+3p+1) |
1/(p-1) |
2/р |
-1 |
44 |
2/(3p2+2p+1) |
2/(p-1) |
2/p |
-] |
45 |
2/(4p2+3p+1) |
1/(p-1) |
2/p |
-1 |
19

46 |
2/(4p2+5p+i) |
2/(p+1) |
2/p |
-1 |
47 |
1/(4p2+5p+1) |
2/(p+1) |
1/p |
-1 |
48 |
3/(4p2+5p-1) |
1/(p+1) |
1/p |
-1 |
49 |
2/(4p2+5p+1) |
2/(p+1) |
2/p |
-1 |
Задача2.
Составить функциональную, принципиальную и структурные схемы,
определить передаточную функцию системы. Дать подробное описание функционирования соответствующих систем управления.
Вариант |
Технологический процесс или операция |
00 |
Обогрева цыплят |
01 |
Регулирования глубины пахоты |
02 |
Вождения зерноуборочного комбайна |
03 |
Нагрева воды |
04 |
Сортирования яиц по весу |
05 |
Регулирования загрузки дробилки |
06 |
Регулирования уровня жидкой среды |
07 |
Регулирования температуры жидкой среды |
08 |
Регул, давления пневмогазовой системы |
09 |
Пастеризации молока |
10 |
Дозирования компонентов комбикормов |
11 |
Считывания штучных изделий |
12 |
Измерения влажности зерна |
13 |
Измерения влажности травяной сечки |
14 |
Управления освещением |
15 |
Дозирования жидкой смеси |
16 |
Смешивания компонентов продуктовой смеси |
17 |
Парообразования в котлах |
18 |
Измерения плотности веществ |
19 |
Токовой перегрузки |
20 |
Загрузки э/двигателей |
21 |
Защиты э/двигателей от перегрузки |
22 |
Регулирование частоты вращения рабочих органов |
23 |
Автоматический контроль посевного агрегата «Кедр» |
24 |
АСУ опрыскивателей, подкормщиков |
25 |
Защиты э/двигателей от перегрузки |
26 |
Регулирование частоты вращения рабочих органов |
27 |
Регулирование уровня содержания углекислого газа |
28 |
Регулирование времени переработки смеси |
29 |
Автоматическое управление прореживателем сах. свеклы |
30 |
Система типа УСАК |
31 |
Система типа АСК-Дон |
32 |
Указатель положения русел (УПР-1) |
33 |
CAB кормоуборочной машины РКС-6 |
34 |
Система типа САВ-1М |
35 |
Система типа САКАР |
36 |
САУ процессом сортировки помидоров |
|
20 |