

36 . Типы коробок подач
Со сменными зубчатыми колесами, обеспечивают большое кол. подач, ограниченного диапазоном. Применяются при ветхой настройке.
С передвижными колесами. Применяют при частой перестройке универсальных станков.
Со встречными конусами и вытяжной шпонкой (простота управления, 8-10 ступеней). Применяются в сверлийных токарноревольверных.
Нортоновские коробки (передача с накидным колесом).
В форме гитары сменных колес. Они позволяют произвести настройку подачи с любой степенью точности (Umin=1/8).
Механизм Меандра – трехваловый механизм, состоящий из ряда 2-х колесных блоков с накидной шестерней. Приимущество: однорычажное управление, малые осевые габариты.
37. Механизмы быстрых перемещений приводов подач
Для повышения производительности за счет сокращения tв, исполняют звенья станков на холостом ходу перемещений, с повышенной скоростью. Для этого применяются механизмы ускоренных перемещений. Структура их зависит от вида тягового устройства, непосредственно от привода ускоренных перемещений, устройства реверсирования.
Дифференциал более приспособлен, чем обгонная муфта. Во избежание перебегов устройство ускоренных перемещений оснащается тормозным механизмом.
38. Коробки подач с бесступенчатым регулированием
Механические вариаторы применяются в приводах подач шлифовальных, револьверных, координатно-расточных, сверлильных и др станков. Наиболее распространеными в приводах подач находят эл.двиг с частотным регулированием, которые обеспечивают оптимальный подбор скорости перемещения исполнительного звена.
39. Расчет деталей коробок подач
Для перемещения исполнительных звеньев при исполнении рабочего хода необходимо обеспечить заданное тяговое усилие, способное преодолевать усилие резания и силы трения.

Ri – реакции опор в направляющих, f – коэф. трения.
Pz=25кН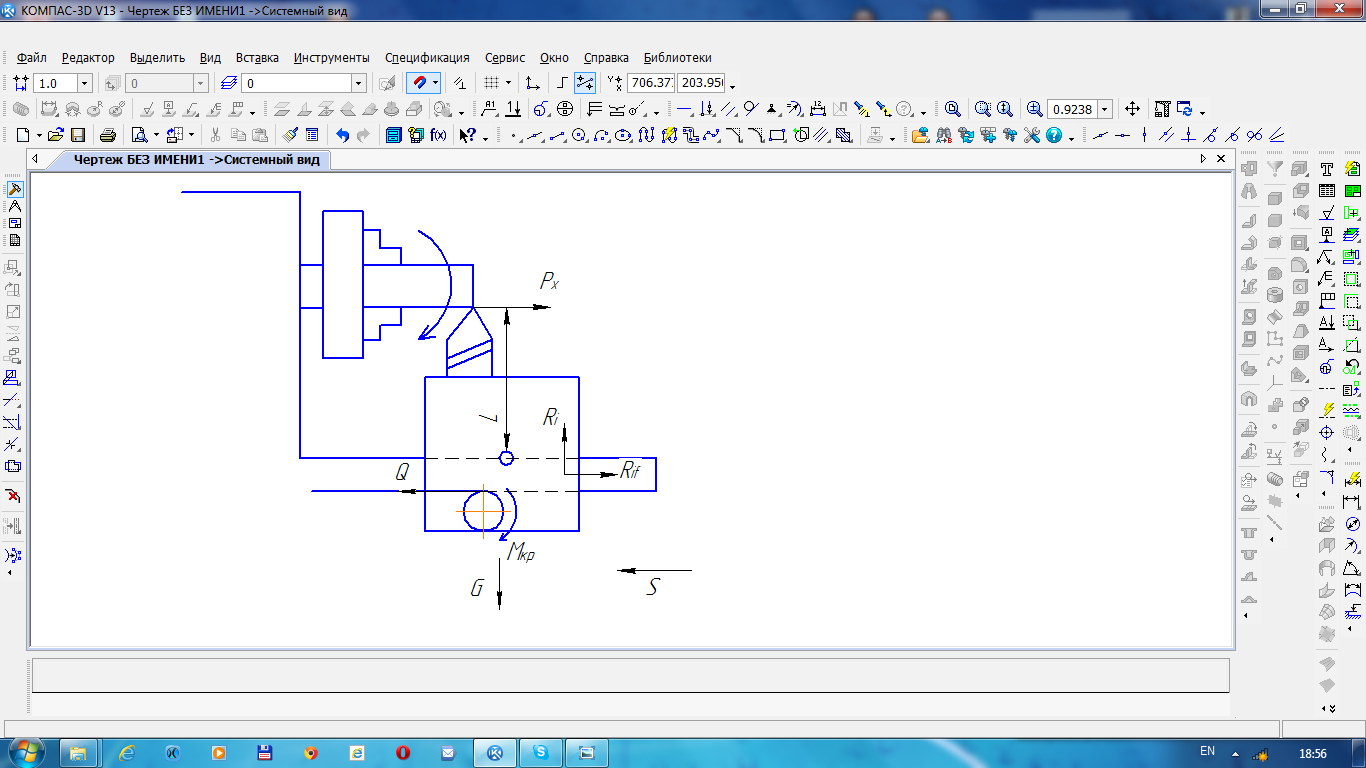
Рх=0,4*Pz=10кН
Py=0,5*Pz=12,5кН
G=17кН
f=0,1
L=230мм
Q=Px+f(A+B+C+D)
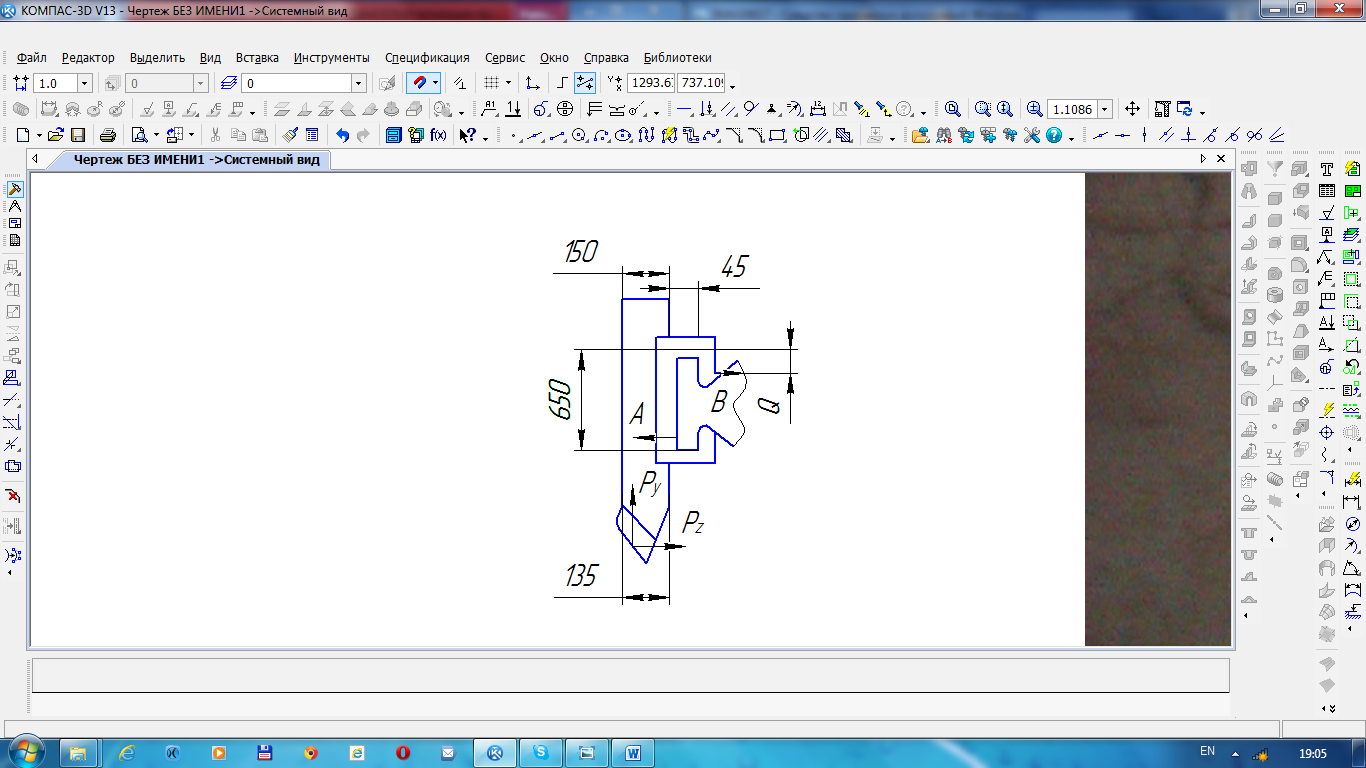
A=35,5кН, В=10,5кН
С=(760+220*Q)/650, D=(110*Q-60)/650,
Q=15кН
40. Механизмы управления коробками скоростей и подач
В производственной эксплуатации ТО необходимо осущ. Движения, выполняющие функцию управления:
Вкл. и выкл. станка
Подвод и отвод инструмента, установленного в инструментальное положение
При настройке совершаемого движения, связанного с установкой и закреплением заготовок, контролем размеров, периодическим поворотом, реверсированием. Для станков со ступеньчатым регулированием это сводится к перемещению зубчатых колес, муфт, устройств зажима.
Системы управления состоят из 3-х частей:
Управляющего звена
Исполнительного звена
Промежуточное звено
По принципу действия системы управления делятся на ручные и автоматические. В системе с ручным управлением примен. винтовые и реечные пары, рычаги.
Привод исполнительных механизмов бывает ручным и механизированным (электрические, гидравлические). Для удержания в заданном положении подводимого элемента применяют различные фиксирующие устройства в виде подпружиненных шариков, штифтов и запирающих устройств.
Для переключения устройств управления иногда требуется совершить несколько последующих движений, что повышает затраты времени на настройку (селективная система). Преселективная система позволяет осущ. часть движений во время работы станка. Позволяет обеспечить сокращение времени настройки.
Ф-ии систем управления и требования к ним
Система управления станком представляет сочетание механических, электрических, электронных, гидравлических, пневматических устройств. Тенденция развития современного станкостроения направлена в сторону автоматизации.
Требования к системе управления:
Безопасность-органы управления должны быть расположены в удобных зонах, а в случае необходимости должны быть продублированы. Необходимо исключать органы управления, вращающиеся во время работы. Все кнопки и переключатели должны быть утоплены в крышке кроме кнопки «Стоп». Органы управления должны фиксироваться в зажимаемом положении легко. Механизмы управления должны блокироваться так, чтобы невозможно было одновременно включить 2 несогласованных движения. Применяются ограничители пути. Система управления должна быть оснащена сигнальным устройством. При обработке токсичных в-в применяют дистанционное управление.
Легкость и удобство манипулирования органом управления. При разработке органа управления должны учитываться физиологические факторы человека. Усилия на рукоятках
 но наибольшим оптимальным является
60-65Н. Если операция управления осущ.
часто, то усилие 40-45Н. Органы управления
во время рабочего хода не должны уходить
от оператора в неудобную зону.
но наибольшим оптимальным является
60-65Н. Если операция управления осущ.
часто, то усилие 40-45Н. Органы управления
во время рабочего хода не должны уходить
от оператора в неудобную зону.Быстрота управления
Мнемоничность управления
Точность системы управления