

2 Вопрос «ттд средств рло полётов»
|
№ п/п |
ХАРАКТЕРИСТИКА |
РЛС ОБНАРУЖЕНИЯ |
Р/ВЫСОТОМЕР | |
|
П-18 |
П-37 |
ПРВ-13 | ||
|
1. |
Диапазон волн |
МВ |
СМВ |
СМВ |
|
2. |
Дальность обнаружения истребителя: - НПОЛ = 500 (200) м - НПОЛ = 8000 м |
50 км 170 км |
60 км 200 км |
(50км) 310 км |
|
3. |
Сектор обзора по УМ |
530О |
028О |
-2+32О |
|
4. |
Скорость обзора по АЗ |
2; 4; 6 об/мин |
3; 6 об/мин |
|
|
5. |
Разрешающая способность: - по Аз - по Н - по Д |
6О
2000 м |
1О
500 м |
2О 0,3 км 1000 м |
ЗАНЯТИЕ 3 «РАДИОЛОКАЦИОННАЯ СИСТЕМА ПОСАДКИ»
1 Вопрос «назначение рсп»
|
|
|
|---|---|
|
|
странственным положением самолётов, совершаю- |
|
|
щих предпосадочный манёвр и заходящих на посадку. |
|
|
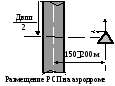
На аэродроме РСП размещается на траверзе ВПП |
|
|
на расстоянии 150200 м от её продольной оси. |
|
|
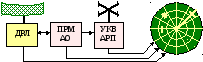
РСП может работать в активном, пассивном ре- |
|
|
жимах и в режиме индивидуального опознавания. Для |
|
|
этого совместно с РСП используется приёмник ак- |
|
|
тивного ответа (ПРМ АО) и наземный УКВ АРП. |
|
С помощью РСП группа руководства полётами (РП, РБЗ, РЗП) решает следу- | |
|
ющие задачи: | |
|
1) Обнаружение, определение координат и управление самолётами на дальностях | |
|
150200 км от аэродрома; | |
|
2) Вывод самолётов на посадочный курс; | |
|
3) Контроль и корректировка пространственного положения самолётов (по на- | |
|
правлению и высоте полёта) при их снижении на посадке до высоты 3050 м. | |
 РСП
предназначена для наземного контроля
за про-
РСП
предназначена для наземного контроля
за про-
2 ВОПРОС «СОСТАВ РСП»
|
В состав любой РСП входят два радиолокатора – диспетчерский (ДРЛ) и по- |
|
садочный (ПРЛ), а также выносные индикаторы системы посадки (ВИСП), уста- |
|
навливаемые на КДП. |
Диспетчерский радиолокатор
Диспетчерский радиолокатор РСП
|
ДРЛ представляет собой РЛС ДМВ диапазона волн и предназначен для обна- |
|
ружения, индивидуального опознавания и управления самолётами, находящимися |
|
на дальних подходах к аэродрому, и последовательного вывода их в зону действия |
|
ПРЛ. Антенна ДРЛ параболическая, вращается со скоростью 1015 об/мин. |
|
Индикатором ДРЛ является ВИКО. |
|
ДРЛ может работать в режимах: |
|
- пассивном; |
|
- активном (совместно с ПРМ АО); |
|
- индивидуального опознавания (совместно с УКВ АРП). |