

3 Вопрос «особенности работы радиолокационного высотомера»
Определение высоты полёта цели
|
РВ представляет собой СМВ РЛС, предназначенную для определения высоты |
|
полёта целей с использованием целеуказания по азимуту от РЛС обнаружения. |
|
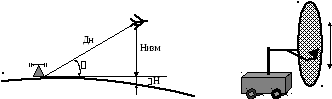
Задача определения высоты полёта цели (Нц) решается на основе соотношения: |
|
Нц = Дн sin + Н; |
|
где: Дн – наклонная дальность цели; |
|
угол места цели; |
|
Н – поправка, учитывающая кривизну земной поверхности. |
|
Из выражения видно, что точность определения высоты зависит от точности |
|
определения Дн и . Повышение точности определения Дн достигается уменьше- |
|
нием рабочей длины волны (РВ работают в СМВ диапазоне); повышение точности |
|
определения достигается сужением ДН в вертикальной плоскости (увеличением |
|
раскрыва антенны по вертикали). |
|
В связи с повышенной разрешающей способностью по углу места РВ иногда ис- |
|
пользуются в качестве радиолокационных постов для обнаружения целей, летящих |
|
на предельно малых высотах. |
4 Вопрос «режимы работы рлс» пассивный режим
|
|
|
|---|---|
|
|
зондирующих и приёме приёмником РЛС отражённых |
|
|
от различных объектов сигналов. В этом режиме обна- |
|
|
руживются все находящиеся в зоне действия РЛС воз- |
|
|
душные цели (свои и чужие). Однако, кроме самолётов, |
|
|
отражателями зондирующих сигналов являются также |
|
|
метеообразования и различные наземные объекты. Поэ- |
|
тому недостатками пассивного режима являются небольшая дальность действия | |
|
(из-за того, что зондирующий и эхо-сигналы сильно затухают при распростране- | |
|
нии в эфире и переотражениях), а также наличие на индикаторе мешающих засве- | |
|
ток, на фоне которых сложно выделить цель. | |
 Этот режим
основан на излучении передатчиком
РЛС
Этот режим
основан на излучении передатчиком
РЛС
Активный режим
|
|
|
|---|---|
|
|
запросных и приёме приёмником сопряжённой с РЛС ап- |
|
|
паратуры активного ответа переизлучённых бортовым |
|
|
ответчиком сигналов. Режим используется для увеличе- |
|
|
ния дальности обнаружения (т.к. мощность переизлу- |
|
|
чённого сигнала гораздо больше мощности эхо-сигнала), |
|
|
для индивидуального опознавания самолётов, а также |
|
для устранения мешающих засветок от посторонних отражателей (метеообразо- | |
|
ваний, наземных объектов). Однако, в этом режиме не обнаруживаются самолё- | |
|
ты противника (из-за отсутствия на них самолётных ответчиков). | |
 Этот режим
основан на излучении передатчиком
РЛС
Этот режим
основан на излучении передатчиком
РЛС