

2 лаба Д
.doc
Цель работы:
получение
навыков параметрической оптимизации
замкнутых по отклонению систем
автоматического регулирования (САР) с
моделью реального объекта и типовым
регулятором. Постановка задачи
параметрической оптимизации САР с
фиксированной структурой формулируется
следующим образом: известны математические
модели элементов САР; известны
математические модели задающих
воздействий и внешних возмущений
![]() ;
заданы базовые параметры типовых
автоматических регуляторов: для
П-регулятора —
;
заданы базовые параметры типовых
автоматических регуляторов: для
П-регулятора —
![]() ;
для ПИ-регулятора —
;
для ПИ-регулятора —![]() ,
,
![]() ,
заданы диапазоны изменения параметров
автоматических регуляторов:
,
заданы диапазоны изменения параметров
автоматических регуляторов:
где
![]()
заданы квадратичные
интегральные критерии качества:
![]()
Необходимо с
помощью методов многомерного поиска
[2] найти, путем имитационного моделирования
в области настроечных параметров
регулятора, такие параметры
![]() ,
,
![]() которые
обеспечивают устойчивость САР
соответствуют
которые
обеспечивают устойчивость САР
соответствуют
![]() ,
или по крайней мере, улучшают критерий
качества J2 по сравнению с его значением
в базовой точке.
,
или по крайней мере, улучшают критерий
качества J2 по сравнению с его значением
в базовой точке.
Задание
1. Для САР электроприводов производственных механизмов, функциональные схемы которых приводятся на рисунках 1 и 2, выбрать математические модели отдельных элементов, согласно выданному преподавателем варианту по таблице 1.
2. Разработать структурную схему САР.
3. Разработать схему программного аналога САР на средствах пакета прикладных программ (ППП) МVТU. Параметры элементов САР, а также начальные условия, внешние воздействия, метод интегрирования и необходимые результаты, отображаемые в отчете по лабораторной работе, задаются в таблице 1.
4. Для заданных значений настроечных параметров САР (в базовой точке) провести имитационное моделирование и оценить критерии качества.
5. Ознакомиться с методом параметрическом оптимизации, описанном в разделе 3, и провести серию имитационных экспериментов с целью поиска настроечных параметров, улучшающих критерий качества по сравнению с его значением в базовой точке.
Примечание:
В имитационных экспериментах принять![]() .В точке с наилучшими значениями
.В точке с наилучшими значениями
![]() провести
дополнительно эксперимент с
провести
дополнительно эксперимент с
![]() заданным
в соответствии с вариантом из таблицы
1.
заданным
в соответствии с вариантом из таблицы
1.
Таблица 1 - Данные для разработки структурных схем САР
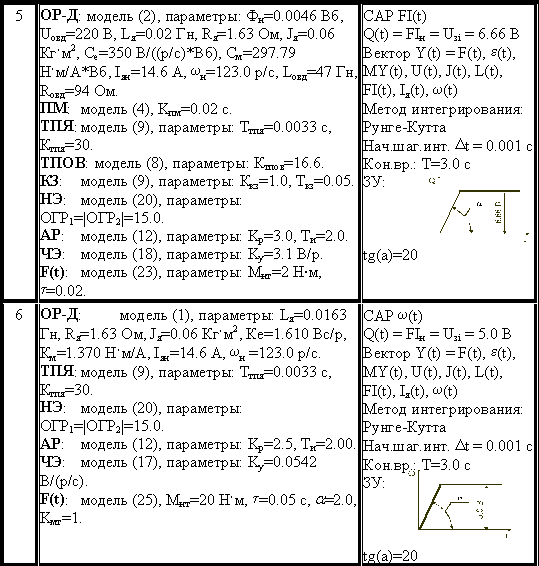
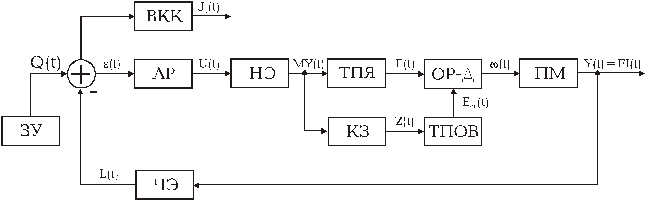
Рисунок 1 - Функциональная схема САР скорости.
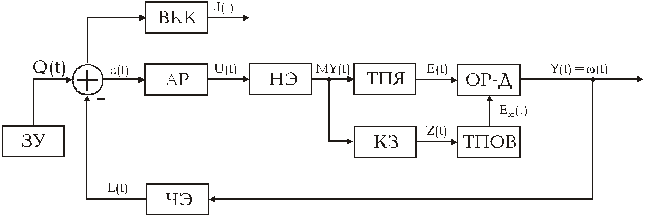 Рисунок
2 - Функциональная схема САР положения
(CAP FI).
Рисунок
2 - Функциональная схема САР положения
(CAP FI).
На
рисунках 1 и 2: Д - двигатель постоянного
тока; ПМ - производственный механизм;
ОР-Д - объект регулирования - двигатель
постоянного тока; ТПЯ - тиристорный
преобразователь якорной обмотки
двигателя; ТПОВ - тиристорный преобразователь
обмотки возбуждения двигателя; НЭ -
нелинейный элемент; АР - автоматический
регулятор с типовым законом управления;
ЧЭ - чувствительный элемент (датчик);
ВКК - вычислитель критерия качества;
![]() -
вектор координат пространства состояний
объекта регулирования,
-
вектор координат пространства состояний
объекта регулирования,
![]() ;
;
![]() -
вектор внешних возмущений,
-
вектор внешних возмущений,
![]() - тормозной момент на валу двигателя;
- тормозной момент на валу двигателя;
![]() -
напряжение на якорной обмотке двигателя;
-
напряжение на якорной обмотке двигателя;
![]() - управляющие воздействия на входе ТПЯ
и ТПОВ;
- управляющие воздействия на входе ТПЯ
и ТПОВ;
![]() - управляющее воздействие на выходе АР;
- управляющее воздействие на выходе АР;
![]() -
задающее воздействие САР;
-
задающее воздействие САР;
![]() -
сигнал обратной связи;
-
сигнал обратной связи;
![]() -
ошибка рассогласования
-
ошибка рассогласования
![]() ;
;
![]() -
интегральная квадратичная оценка
качества САР.
-
интегральная квадратичная оценка
качества САР.
Ход работы.
а) Выберем для своего варианта (5 варианта) математические модели элементов структурных схем САР.
1. Двигатель постоянного тока с управлением по цепи якорной обмотки и по цепи обмотки возбуждения.
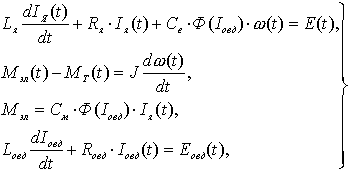 (1)
(1)
где
![]() - ток в обмотке (A) и напряжение(B) на
зажимах обмотки возбуждения двигателя;
- ток в обмотке (A) и напряжение(B) на
зажимах обмотки возбуждения двигателя;
![]() - индуктивное и активное сопротивления
обмотки возбуждения.
- индуктивное и активное сопротивления
обмотки возбуждения.
Таблица
2 - Универсальная характеристика
![]() =f(
=f(![]() )
)
|
|
0 |
0.37 |
0.65 |
0.82 |
0.92 |
1.0 |
1.05 |
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1.0 |
1.2 |
Lя =0,02 Гн
Rя =1,63 Ом
Jя =0,06 кг*м2
Се = 350 В/((р/с)*Вб)
См =297,79 Нм/А*Вб
Uовд = 220 В
Lовд = 47 Гн
Rовд = 94 Ом
2. Производственный механизм в САР положения (CAP FI)
![]() (2)
(2)
Кпм = 0,02с - коэффициент передачи редуктора.
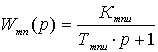
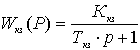
3. Тиристорные преобразователи (ТПЯ и ТПОВ)
C учетом инерционности преобразователя.
для ТПЯ:
 (3)
(3)
Ктпя =0,0033с; Ттпя=30
для ТПОВ:
![]() (4)
(4)
Ктпов =16,6
4. Корректирующее звено
 . (5)
. (5)
Ккз =1; Ткз=0,05
5. Автоматический регулятор.
Пропорционально-интегральный - ПИ
 (6)
(6)
Rp=3; Ти=2
6. Чувствительный элемент - датчик.
В САР положения - потенциометрический датчик угла поворота
![]() .
(7)
.
(7)
Ку=3,1 В/р
7. Нелинейный элемент.
С ограничением.
Статическая характеристика. ОГР1=![]() =15
=15
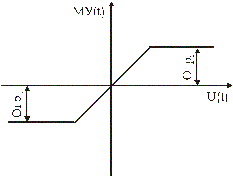
Рисунок 3 - Статическая характеристика нелинейного элемента с ограничением
8. Вычислитель критерия качества (интегральный квадратичный)
 .
(8)
.
(8)
9. Возмущающие воздействия:
![]() (9)
(9)
Мнт=2Н*м;
![]() =0,02с.
=0,02с.
б) Соберем схему, изображенную на рисунке 1, подставляя выбранные выше математические модели элементов с соответствующими параметрами.

Рисунок 3 - Схема программного аналога САР на средствах ППП MVTU
в) Снимем график тока
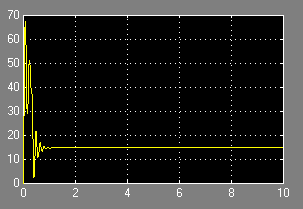
Рисунок 4 – График тока
г) Снимем график скорости
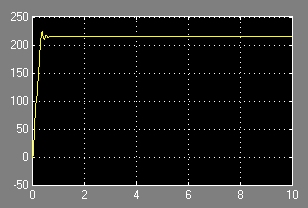
Рисунок 5 – График скорости
д) Определим характер динамической ошибки, в данном случае она носит колебательный характер.
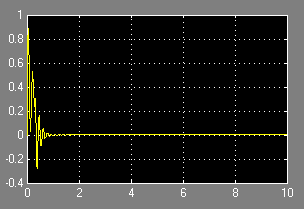
Рисунок 6 –График динамической ошибки
Добавим в схему блоки (блок умножения, интегратор и “Display”), чтобы определить величину динамической ошибки, схема должна получиться такая, какая представлена на рисунке 7.
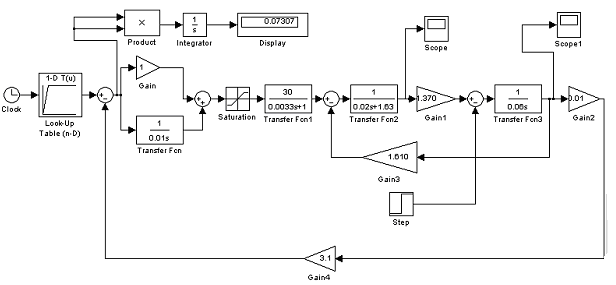
Рисунок 7 – Схема для определения величины динамической ошибки
В блоке “Display” нам будет выдана величина динамической ошибки равная 0,073.
Если мы вместо блока “Display” поставим блок “Skope”, то нам будет выдан график, по которому мы также можем определить, что величина динамической ошибки будет равна 0,073.
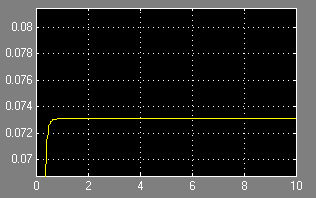
Рисунок 8 – График, показывающий величину динамической ошибки
е) По приведенному выше графику тока определим следующие параметры:
1. Время переходного процесса: tп.п.= 3 с
2. Колебательность: n = 1
3.
![]() уст.=
уст.=
![]()
![]() уст.=
уст.=![]()
4.
![]()
![]()
5. J = 1,8
ж) По приведенному выше графику скорости определим следующие параметры:
1. Время переходного процесса: tп.п.= 3 с
2. Колебательность: n = 1
3.
![]() уст.=
уст.=
![]()
![]() уст.=
уст.=![]()
4.
![]()
![]()
5. J=1,8