

Способы радионавигационных определений по нка
Условия навигационных определений с движущегося судна относительно подвижной или неподвижной опорной станции различаются между собой только скоростью изменения навигационных параметров, определяемых относительно опорных станций.
Вследствие этого навигационное определение при помощи НКА можно производить теми же способами, что и при использовании РНС с неподвижными опорными станциями.
Однако, большие скорости изменения навигационных параметров:
Исключают возможность неавтоматических или полуавтоматических измерений;
Резко повышают требования к скорости отработки следящих систем судовых приемоиндикаторов;
Создают возможность эффективного использования скоростных методов определения линий положения.
С учетом перечисленных особенностей при помощи НКА можно определять место судна в море, измеряя:
расстояния до НКА;
направления на НКА в горизонтной системе координат;
разности расстояний до нескольких последовательных положений НКА на орбите;
скорость и ускорение сближения с НКА.
Расстояния до НКАможно измерять способами:1)«запрос-ответ» и2)с помощью «двух генераторов».
Определение направлений, то есть высоты (зенитного расстояния) и азимута на НКА, методически не отличается от определения направлений на небесные светила.
Разность расстоянийдо нескольких последовательных положений НКА можно получить, измеряя величину угла изменения фазы принимаемого сигнала, за счет изменения длины пути, проходимого этим сигналом между НКА и судном.
Такое измерение можно осуществить по блок-схеме (рис.6.3) путем непрерывного сравнения частоты колебаний, принимаемых от НКА, с частотой колебаний опорного генератора и интегрирования набега фазыза счет эффекта Доплера.
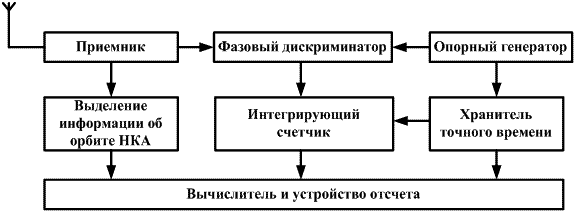
Рис. 6.3. Блок-схема доплеровского метода определения линии положения
Основным условием выполнения измерений по этой схеме является равенство частоты (ωИ) колебаний, излучаемых с НКА и частоты (ω0) колебаний опорного генератора.
Хотя доплеровское приращение частоты принимаемых колебаний здесь непосредственно не измеряется, а используется лишь для измерения суммарного сдвига фаз сравниваемых колебаний, рассмотренный фазовый метод определения разности расстояний до НКА часто называют доплеровским методом.
Доплеровский метод определения линии положения при помощи НКА можно осуществить двумя основными способами: 1) дифференциальными2) траверзным.
Дифференциальный способизмерения скорости сближения сводится к прямому измерению мгновенных значений разности частот принимаемых колебаний и колебаний местного опорного генератора (рис.6.4).

Рис. 6.4. Блок-схема дифференциального способа измерения скорости сближения с НКА
Если
частота ωИ
= ω0,
то величина доплеровского приращения
частоты![]() при
известных значенияхωИиυФопределяет значение производнойdD
/ dt, то есть скорость сближения НКА
и судна.
при
известных значенияхωИиυФопределяет значение производнойdD
/ dt, то есть скорость сближения НКА
и судна.
Траверзный способ измерения ускорения сближения с НКАосуществляется путем определения момента прохождения доплеровского приращения частоты (Δωд) через нуль и сводится к измерению скорости изменения частоты в этот момент.
Так как в момент, когда Δωд = 0, судно находится на траверзе орбиты НКА, этот способ и называюттраверзным.
Измеренное значение скорости изменения частоты определяет вторую производную от расстояния до НКА по времени, то есть ускорение сближенияНКА и судна.
Траверзным способом определения координат места судна за одно прохождение НКА можно получить всего лишь две линии положения, пересекающихся под углом 90°.
Малое количество получаемой информации является наиболее существенным недостатком траверзного способа. Однако этот недостаток компенсируется более простой обработкой получаемой информации, что позволяет определять место судна по НКА без специальной судовой ЭВМ.