

Передаточные функции типовых сар по каналам возмущения и задания
В общем виде передаточные функции замкнутой САР по всем каналам были получены в ранее. Рассмотрим примеры ПФ САР, когда объект и регулятор взяты из класса типовых:
Возьмем в качестве
объекта:
 ,=
0;1.
,=
0;1.
В качестве регулятора:
 .
.
 =
=
=
 .
.
Полученная передаточная функция, по сути, охватывает различные алгоритмы регулирования. От ПИД-регулятора к более простым можно перейти установкой нулю соответствующих настроечных параметров регулятора. Чтобы убрать «И»-составляющую надо числитель и знаменатель передаточной функции разделить на Тиз и принять 1/Тиз = 0.
По каналу задания:
 =
=
=
 .
.
Знаменатели обеих
передаточных функций, как и должно быть,
совпадают.
 имеет дифференцирующие свойства, если
в регуляторе есть И – составляющая.
имеет дифференцирующие свойства, если
в регуляторе есть И – составляющая. имеет статические свойства.
имеет статические свойства.
Оценка работы систем автоматического управления
Лекция №6
Анализ линейных непрерывных сар: устойчивость сар
Общее понятие устойчивости динамической системы. Особенности устойчивости линейных сар
Дадим более строгое понятие устойчивости динамической системы, которое будет справедливым для всех типов систем, в том числе и нелинейных. Используем для этого следующее геометрическое представление:
Предположим, что
для рассматриваемой системы переходные
процессы дифференцируемы в каждой
точке пространства. Система
устойчива,
если для любого ρ < R существует такое
r ≤ ρ <R, что траектория у(t), начинающаяся
в точке у(0), принадлежащей области Sr,
остается в сферической области Sρ при
t
[0, ].
Система
асимптотически устойчива,
если она устойчива и, кроме того, каждая
траектория системы у(t) начинающаяся в
произвольной точке области Sρ при t
стремится к началу координат области
Sr (к нулю).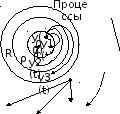
Рис. 6.1
Система неустойчива, если для некоторого, хотя бы одного, ρ < R и любого r (каким бы малым оно не было выбрано) всегда найдется внутри области Sr такая точка у(0), что траектория у(t), начинающаяся в этой точке, за конечное время выйдет за пределы сферы Sρ.
Эта формулировка охватывает как линейные, так и нелинейные системы, в частности системы, работающие в режиме автоколебаний. Она предполагает анализ устойчивости на базе методов Ляпунова.
В классе линейных систем анализ устойчивости резко упрощается. Устойчивость линейных систем не зависит от начальных условий, величины и характера входных воздействий. В этом случае анализ устойчивости можно вести только по виду собственного оператора САР, т.е. достаточно анализировать только собственное движение системы. Аналитически - достаточно рассматривать при анализе устойчивости однородные ДУ САР.
Определение устойчивости сар прямыми методами. Виды неустойчивости
Пусть Qc(p) – собственный оператор САР, тогда однородное ДУ системы имеет вид: Qc(p)y = 0.
Его решение в общем случае представляет собой сумму:
 ,
(6.1)
,
(6.1)
где Сi
– постоянная
интегрирования (определяется из начальных
условий),
 ;
;
n – порядок ДУ;
i – корни характеристического уравнения Qc(λ) = 0.
В общем случае в (6.1) i являются комплексно-сопряженными:
 .
.
В частных случаях при βi = 0 или αi = 0 они вырождаются в действительные или чисто мнимые.
Каждая пара сопряженных корней в (6.1) дает свою i-тую составляющую в переходном процессе:
yi
=
 =
= ,
,
где
 иi
– постоянные, определяемые из начальных
условий.
иi
– постоянные, определяемые из начальных
условий.
Из (6.1) следует, что для того чтобы y сходился, т.е. стремился в окрестность нуля, необходимо чтобы все yi стремились бы в окрестность нуля (сходились). Если хотя б одна составляющая будет расходиться (не будет стремиться в окрестность нуля), то и y в целом будет иметь расходящийся характер.
Проанализируем характер составляющих yi в y в зависимости от конкретного вида корней, см. рис. 6.2.
Расходящиеся компоненты соответствуют корням с положительной действительной частью (i > 0). В том случае, если i = 0 (корни чисто мнимые), то система находится на границе устойчивости – переходные процессы в ней и не сходятся и не расходятся.
Движение системы на границе устойчивости является неустойчивым видом движения, т.к. любые сколько угодно малые изменения параметров системы (объекта или регулятора) приведут к расходящимся или сходящимся процессам.
Фактически движение САР на границе устойчивости – математическая абстракция. Практическая вероятность того, что и у объекта, и у регулятора могут оказаться такие параметры, что система окажется строго на границе устойчивости равна нулю.
Корни знаменателя передаточной функции системы Qc(λ) называются полюсами передаточной функции.
Если воспользоваться приемом отображения корней полинома на комплексной плоскости точками (см. рис. 6.3), то сформулированный ранее вывод об устойчивости системы можно перефразировать так: «расположение полюсов передаточной функции САР для ее устойчивости должно быть «левым» (т.е. все действительные корни и действительные части комплексно-сопряженных корней должны быть отрицательными)».
1. Корни действительные (βi = 0) 2. Корни комплексные (βi 0,i 0)
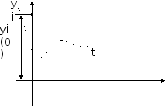
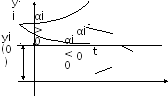
3. Корни комплексные (βi 0,i 0) 4. Корни чисто мнимые (βi 0,i = 0)
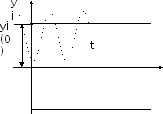
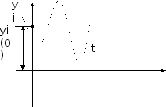
Рис. 6.2
Примеры расположения корней САР 4-го порядка и ее устойчивость:
Система устойчива Система на границе Система на границе
устойчивости устойчивости



Неустойчивость Неустойчивость