

5.4 Передача відміток на монтажний горизонт
Висотну основу на монтажному горизонті становлять робочі репери або маяки. Для цього використовують закладні деталі в конструкціяї, штирях, скоби, пластини,... . Позначки робочих реперів визначають способом геометричного чи тригонометричного нівелювання. Рекомендується виконання геометричного нівелювання.
Технологія передачі позначки на монтажний горизонт подібна до передачі позначки в котлован.
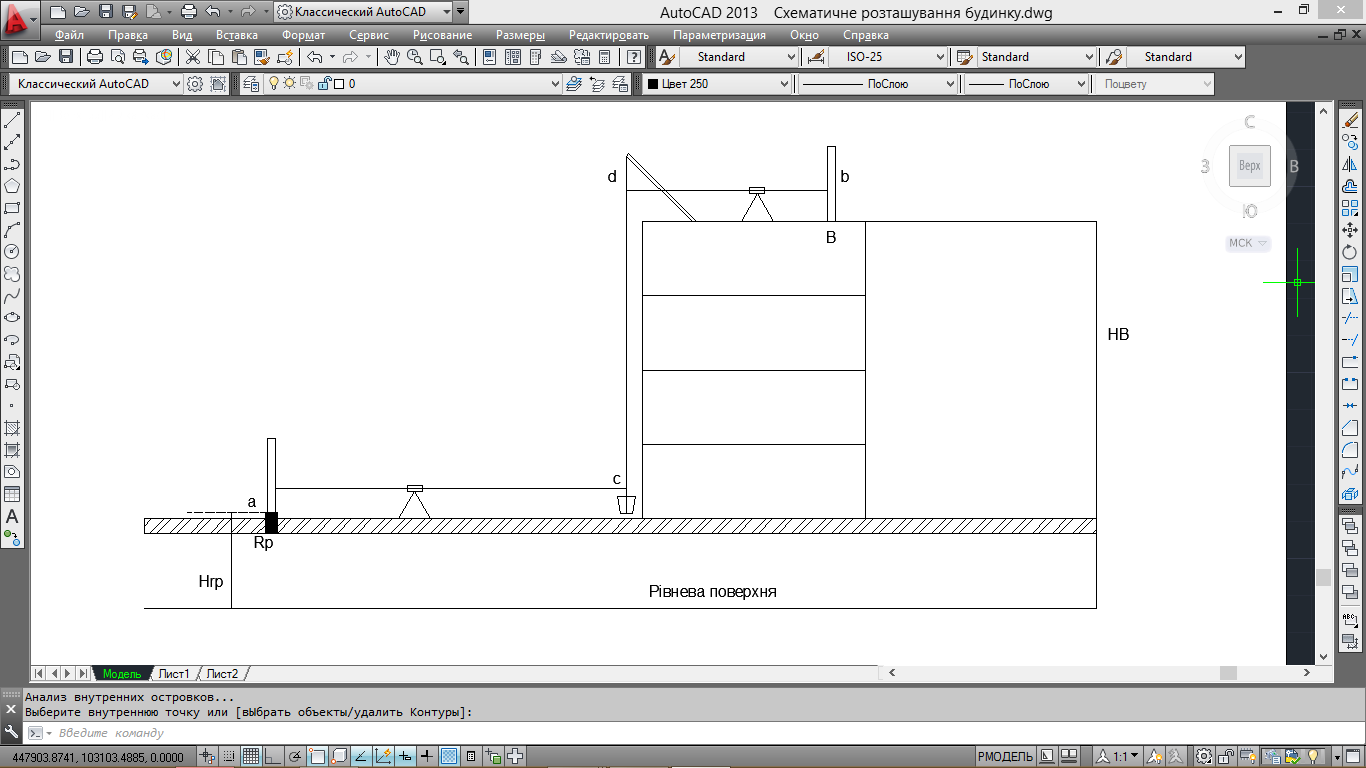
Передача позначки на монтажний горизонт способом геометричного нівелювання
Шукана позначка точки В на дні котловану обчислюється за формулою

У результат вимірювання довжини рулетки (d - с) вводять поправки за компарування, температуру і розтяг під дією маси тягаря.
Поправка за розтяг обчислюється за формулою

де Р — маса тягаря;
l=d – c; E — модуль пружності (для сталі Е = 2*106 кг/см2);
 — площа
поперечного перерізу рулетки.
— площа
поперечного перерізу рулетки.
Середня квадратична похибка визначення точки В дорівнює

ma, mb, me — середні квадратичні похибки відліків а і b та довжини рулетки l.
 2
мм
2
мм
При передачі точок на дно глибокого котловану є доцiльним використання електронного та .лазерного нівелірів.
5.5 Побудова та розрахунок точності просторової геодезичної мережі (пгм)
Розрахунок точності зовнішньої мережі (лінійно-кутовим мережа)
Оскільки данна мережа має досить велику кількість обрахунків, використовувався програмний засіб Invent-Grad.
Прилад на який розраховується точність має похибку в вимірюванні кутів 2’’ та 3 мм +2 мм/ км. З урахуванням цих СКП виконувався поередній обрахунок точності.
Попередня
оцінка точності лінійно кутової мережі,
розрахована на Тахеометр
Focus
6 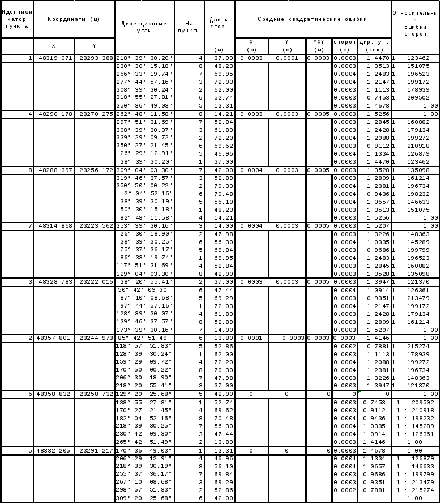

mп1=2,1 мм mп4=2,1 мм mп8=2,1 мм
mп7=2,1 мм mп3=2,1 мм mп2=2,1 мм
mп6=2,0 мм mп5=2,1 мм
Побудова зовнішньої геодезичної мережі.
Виносимо точки п.3 – п.8 від базисної лінії п.1 п.2. методом полярних координат, а саме спосіб полярних координат застосовують на відкритій місцевості. Положення характерної точки ситуацій та рельєфу визначається горизонтальним кутом відносно ліній знімальної основи AB та відстані l від точки знімання основи А до точки місцевості (рис.*). Кути вимірюють тахеометром ( теоделітом) за ходом годинникової стрілки від лінії АВ. Відстані l вимірюють тахеометром.
Рис.* Спосіб полярних координат
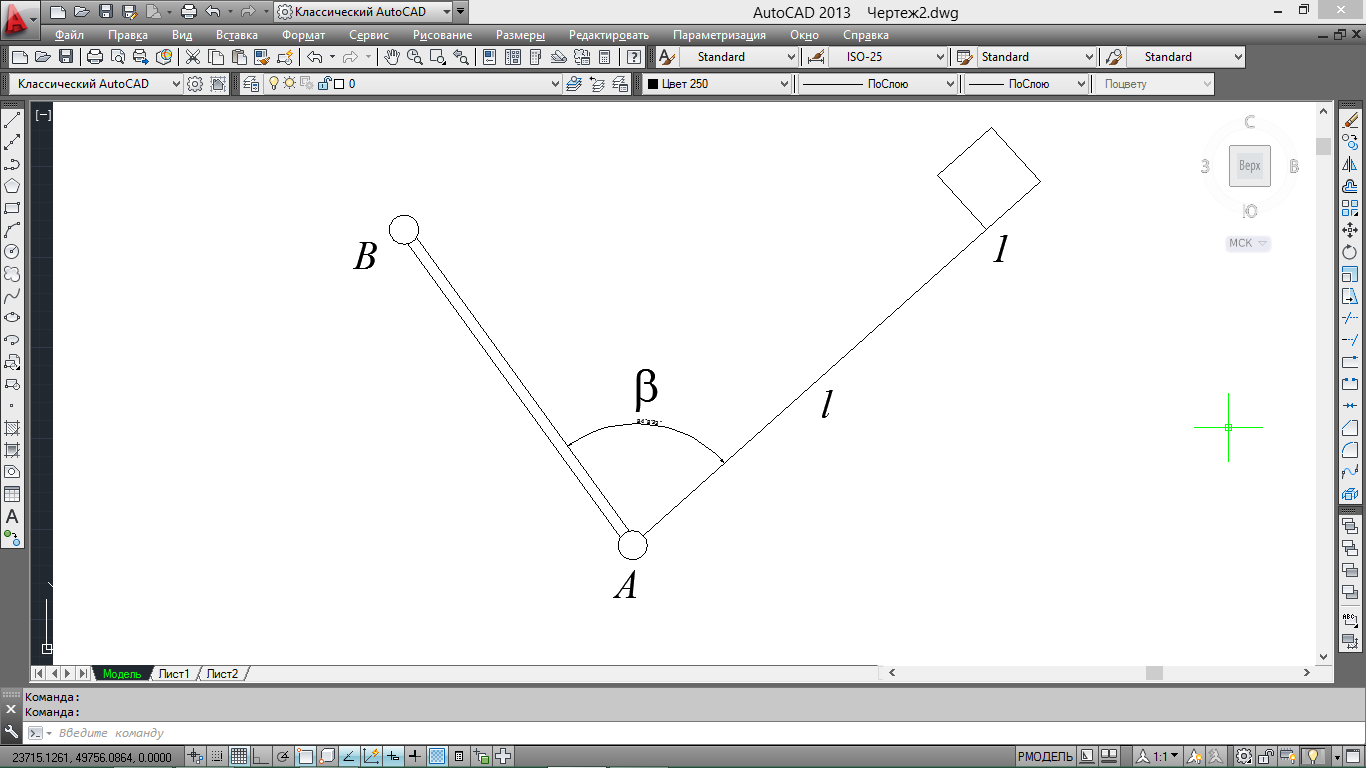
Найбільшь ефективний при використанні електронних тахеометрів. У способі полярних координат нуль лімба орієнтують за напрямком лінії знімальної основи АВ. Після винесення точок виконується урівнювання лінійно-кутової мережі по пунктам які були винесені та отримання урівняних координат.
|
Номер точки |
X |
Y |
|
П.1 |
48319,071 |
23293,388 |
|
П.2 |
48357,801 |
23244,973 |
|
П.3 |
48328,784 |
23222,016 |
|
П.4 |
48290,179 |
23270,274 |
|
П.5 |
48332,205 |
23291,217 |
|
П.6 |
48358,832 |
23258,732 |
|
П.7 |
48314,869 |
23223,562 |
|
П.8 |
48288,398 |
23256,171 |
Католог попередньої оцінки координат
|
Номер точки |
X |
Y |
|
П.1 |
48319,0704 |
23293,3874 |
|
П.2 |
48357,8014 |
23244,9735 |
|
П.3 |
48328,7843 |
23222,0160 |
|
П.4 |
48290,1782 |
23270,2737 |
|
П.5 |
48332,2046 |
23291,2166 |
|
П.6 |
48358,8322 |
23258,7324 |
|
П.7 |
48314,8692 |
23223,5621 |
|
П.8 |
48288,3978 |
23256,1712 |
Таб. Проектних координат координати
|
Номер точки |
X |
Y |
|
П.1 |
-0,0006 |
-0,0006 |
|
П.2 |
0,0004 |
0,0005 |
|
П.3 |
0,0003 |
0,0000 |
|
П.4 |
-0,0008 |
-0,0003 |
|
П.5 |
-0,0004 |
-0,0004 |
|
П.6 |
0,0002 |
0,0004 |
|
П.7 |
0,0002 |
0,0001 |
|
П.8 |
-0,0002 |
0,0002 |
Оскільки різниця значень між попередньо оціночними та плановими точками в допуску, значить що данна мережа може будуватись приладом такої точності.