

5.4. Регулируемый электропривод с обратными связями по току и скорости и суммирующим усилителем
Регулируемый электропривод с отрицательной обратной связью по скорости. Для получения достаточно большого диапазона регулирования скорости необходимо повышать жесткость механических характеристик и вводить в систему электропривода отрицательную обратную связь по скорости. Наличие главной обратной связи по скорости является наиболее характерной чертой электропривода с большим диапазоном регулирования скорости.
Схема регулируемого электропривода представлена на рис. 14.11. Двигатель М получает питание от силового преобразователя U. Скорость двигателя регулируется вниз от номинальной посредством изменения напряжения якоря Uя.
На валу двигателя установлен тахогенератор BR, напряжение которого поступает на регулятор скорости AR, который может работать в качестве П– или ПИ–регулятора.
Структурная схема регулируемого электропривода представлена на рис. 14.12. Пунктиром показана обратная связь, которая в этом варианте привода не используется.

Рис. 14.11. Схема регулируемого электропривода
с обратной связью по скорости
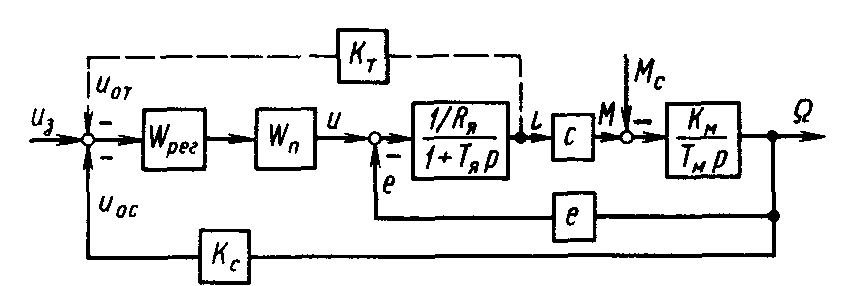
Рис. 14.12. Структурная схема регулируемого электропривода с обратной связью по скорости (цепь обратной связи по току показана пунктиром)
Составим уравнение, описывающее динамические процессы в приводе. Скорость двигателя постоянного тока зависит от напряжения якоря и момента сопротивления
![]() .
.
На этом основании для разомкнутой цепи регулируемого ЭП и
![]() ,
,
но
напряжение Uoc
связано со скоростью двигателя
![]() .
.
Подставив это значение в предыдущую формулу и решив ее относительно скорости, будем иметь

Регулируемый электропривод с обратной связью по скорости и току якоря. Кроме основной обратной связи по скорости в регулируемом электроприводе используют обратную связь по току якоря. Ток якоря пропорционален моменту, поэтому, управляя током, мы по сути дела управляем моментом ЭД и формируем силовое воздействие на механическую систему. Можно считать, что обратная связь по скорости определяет точность регулируемого электропривода, а обратная связь по току – его быстродействие.
Схема регулируемого электропривода с обратными связями по скорости и току представлена на рис. 14.13. Во многом эта схема совпадает со схемой, изображенной на рис. 14.11. Отличие заключается в том, что в цепи якоря установлен датчик тока ВА, сигнал которого поступает на регулятор А. В регуляторе (суммирующем усилителе) происходит алгебраическое суммирование задающего сигнала и сигналов обратной связи по току и скорости.
Воспользуемся структурной схемой, приведенной на рис. 14.13. с учетом пунктирной линии, образующей обратную связь по току.
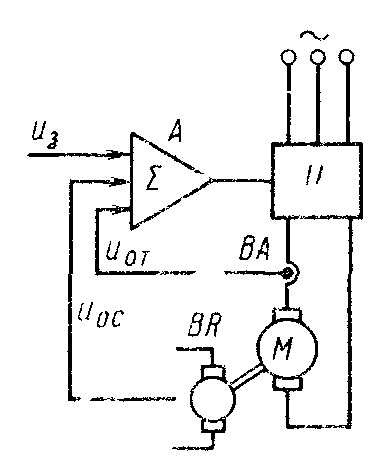
Рис. 14.13. Схема регулируемого электропривода с обратными связями
по скорости и току
Регулируемый
электропривод с обратной связью по
скорости и по току с отсечкой.
В электроприводе станков и ПР широко
применяют системы привода, в которых
действует отрицательная обратная связь
по току с отсечкой. Нелинейная обратная
связь по току (рис. 4.22, а) действует
следующим образом: до тех пор, пока ток
якоря не превышает величины тока отсечки
![]() ,
сигнал обратной связи равен нулю. Если
же
,
сигнал обратной связи равен нулю. Если
же
![]() ,
то вводится в действие сильная
отрицательная обратная связь по току,
которая ограничивает величину тока
якоря на заданном уровне.
,
то вводится в действие сильная
отрицательная обратная связь по току,
которая ограничивает величину тока
якоря на заданном уровне.
При постоянном магнитном потоке ограничение тока якоря эквивалентно ограничению момента. Поэтому механическая характеристика такого привода состоит из двух участков (рис. 14.14, б).

Рис. 14.14. Схема (а) и механическая характеристика (б)
электропривода с отсечкой по току
На
первом участке в приводе действует
только отрицательная обратная связь
по скорости и жесткость механических
характеристик велика. При больших
моментах «срабатывает» отсечка по току
и добавляется сильная отрицательная
обратная связь по току, которая уменьшает
выходное напряжение преобразователя
и снижает жесткость механических
характеристик. Наклон механических
характеристик на втором участке резко
увеличивается. Такие характеристики
называют экскаваторными. Привод с
отсечкой по току может работать на
жесткий упор при
![]() = 0. Ток якоря при нулевой скорости привода
называют током стопорения.
= 0. Ток якоря при нулевой скорости привода
называют током стопорения.
В
схемах отсечки по току (рис. 4.23, а)
напряжение, снимаемое с шунта, включенного
в цепь якоря двигателя
![]() ,
сравнивается с опорным напряжением
uоп,
пропорциональным току отсечки.
,
сравнивается с опорным напряжением
uоп,
пропорциональным току отсечки.
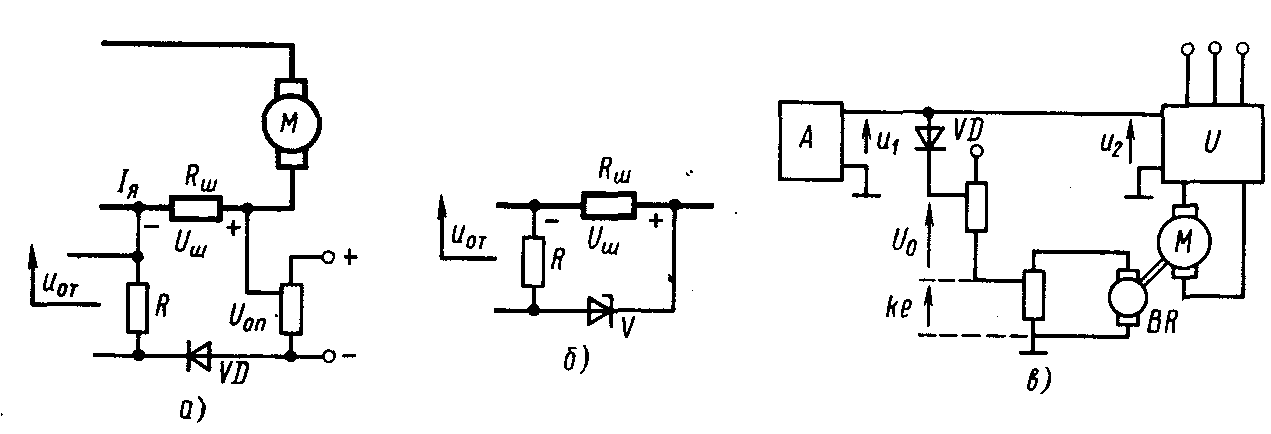
Рис. 14.15. Схемы отсечки по току: а – с диодом в качестве порогового элемента; б – со стабилитроном; в, г – с упреждающим токоограниченнем
Опорное
напряжение запирает диод VD.
В результате ток в цепи может протекать
только при
![]() .
Этот ток создает падение напряжения на
резисторе R,
которое и является напряжением обратной
связи. Величину тока отсечки регулируют
путем изменения опорного напряжения.
.
Этот ток создает падение напряжения на
резисторе R,
которое и является напряжением обратной
связи. Величину тока отсечки регулируют
путем изменения опорного напряжения.
В
схеме на рис. 4.23, б отсечка по току
осуществляется с помощью стабилитрона
V. При напряжении
![]() происходит пробой стабилитрона и на
нагрузочном сопротивлении возникает
напряжение обратной связи.
происходит пробой стабилитрона и на
нагрузочном сопротивлении возникает
напряжение обратной связи.
Отсечка по току позволяет стабилизировать момент двигателя не только в статическом режиме при работе на упор, но и в динамическом режиме. Переходные процессы в таком приводе происходят с почти постоянным динамическим моментом. В приводах с малоинерционными тиристорными преобразователями токоограничение имеет особенно важное значение.