

4.3 Динамическое подобие при физическом моделировании системы «всп – мрт»
Оптимальным способом проверки проектных решений и нахождение рациональных параметров, как на стадии стендовых, лабораторных, так и доводочных испытаний является физическое моделирование реальных условий эксплуатации и воспроизведение их на моделях. При решении вопросов испытаний и доводки путевых машин с целью получения их оптимальных служебных характеристик, требуется разработка и создание физических моделей испытательных комплексов, позволяющих выполнять данные работы с минимальными затратами.
Среди задач моделирования выделяют одной из первых – усовершенствование прогнозирующих моделей, охватывающих полный диапазон режимов эксплуатации. Отсутствие стандартизованного способа лабораторных испытаний, воспроизводящих в достаточной мере поведение пары сцепления «колесо – рельс» в условиях эксплуатации, приводит к противоречивым результатам, необоснованным выводам и рекомендациям. Вопрос не только в том допустимо ли использовать для оценок, например, при моделировании работы пары трения качения «колесо – рельс» четырехшариковую машину трения [4], схему "палец-диск" [9] или машину Амслера [10], а в реализации таких модельных условий, которые в соответствии с принципами физического моделирования обеспечивают реализацию равных условий сцепления натурного образца и его модели. Рассмотрим последовательно условия обеспечения адекватности параметров физико-математической модели и натурной механической системы путевой машины.
Традиционное представление о свойствах динамически нагруженной упругой системы «МРТ – ВСП» нуждаются в уточнении. Она, как минимум, состоит из двух упругих подсистем, объединенных в единое целое через сцепление в контакте «колесо – рельс». Поэтому для модельной оценки тягово-тормозных характеристик путевых машин анализ, исследование и испытания некомфорного, динамически нагруженного узла сцепления необходимо проводить с учетом взаимовлияния параметров механических систем ВСП, путевой машины и контакта «колесо – рельс». Испытательный стенд, представляющий физическую модель системы, должен включать как равноправные и взаимосвязанные модели ее механических систем и узла сцепления «колесо – рельс».
Впервые проблема моделирования и исследования фрикционных механических систем как единого целого была поставлена в работе [4]. В соответствии с методикой процесс сцепления следует рассматривать как некоторую связь, которая замыкает динамические подсистемы машины, взаимодействующие через трение, в единую динамическую систему. В ФМС исследуемая физическая модель должна включать как равноправные: пару «колесо – рельс» с учетом случайного характера сил сцепления в зоне контакта и их динамическими характеристиками, а также динамически изменяющиеся параметры механической системы.
На основании вышеизложенного становится ясно, насколько важна при моделировании данной системы реализация принципов динамического подобия натурного образца и его модели. Следовательно, комплексное моделирование системы необходимо начинать с оценки условий, обеспечивающих динамическое подобие составляющих ее частей, то есть механических систем и пары сцепления «колесо – рельс».
Исследование и учет динамических свойств путевых машин при физическом моделировании важен еще и тем, что целью данных исследований является не только объяснение и динамическое описание процессов, но и описание способов, с помощью которых можно заранее задавать динамические качества вновь проектируемых или модернизируемых путевых машин.
4.3.1 Динамическое подобие механических систем без узлов трения
В реальных эксплуатационных условиях рельсы и колеса путевых машин имеют неровности. При движении по неровностям колеса совершают сложные пространственные перемещения, вызывая колебания рессор и находящегося на них кузова, который начинает совершать возвратно-поступательные (подпрыгивание, подергивание, относ) и вращательные колебания (виляние, боковая качка, галопирование). Железнодорожный путь под воздействием колебаний путевой машины также вовлекается в колебательный процесс. Вследствие этого при движении путевой машины возникают разные по своим параметрам колебания железнодорожного пути, неподрессоренных масс и надрессорного строения, а между ними – динамические силы взаимодействия (вертикальные, горизонтальные поперечные и продольные), подчиняющиеся вероятностным закономерностям. Появление неровностей на пути обусловлено следующими причинами:
Несоответствие фактического положения рельсовых нитей (пути) в плане и профиле проектному;
Несоответствие фактических размеров колесных пар номинальным размерам;
Волнообразного износа головки рельса, появляющегося в процессе эксплуатации (длинные неровности более 0,25м и короткие – менее 0,25 м, так называемые «рифли»), а динамические неровности на поверхности катания колес (искажения круглого очертания поверхности катания), могут быть изолированными (местными) и непрерывными по кругу катания;
Неравноупругостью пути по длине, являющейся следствием различных факторов: загрязненностью балластного слоя и состояния шпал, расстояния между шпалами, качества подбивки шпал, и изношенности пути, различного состояния грунтов земляного полотна, их несущей способности;
Недостатками текущего содержания пути;
Конструктивными особенностями пути и подвижного состава (наличие кривых и прямых участков, возвышения наружного рельса в кривых, механических стыков, стрелок, крестовин, коничности колес и др.).
Динамику путевых машин при движении по неровностям пути можно разделить на:
Вертикальную – исследование сил и перемещений, проходящих в вертикальной плоскости вдоль оси пути.
Горизонтальную – перемещение путевой машины в горизонтальной плоскости (вписывание в кривые).
Поперечную – движение экипажа в вертикальной плоскости перпендикулярно оси пути.
Продольную – действие сил и перемещений при движении путевой машины вдоль пути.
Как показывает практика в реальности выделить и исследовать один из видов динамики будет также неверно, все разделы связаны между собой, чисто одной какой-то динамики нет. Однако и связать воедино все виды динамики при движении путевой машины задача не столько трудная, сколько несущественная в своей реализации. Можно с уверенность сказать, что при движении по прямой на величину силы тяги наибольшее влияние оказывает вертикальная и продольная динамика, тогда как при движении в кривом участке пути – горизонтальная, поперечная и в меньшей степени вертикальная.
Обоснование этому может служить такое понятие как устойчивость движения, характеризующееся постоянством параметров, определяющих динамическое поведение путевой машины. Постоянство параметров определяется неизменным запасом энергии колебания, причем энергия эта складывается из запаса кинетической и потенциальной энергии реализуемой в данных условиях движения.
Для решения проблемы повышения тяговых характеристик путевой машины необходимо подробно исследовать процессы сцепления, протекающие на контакте колеса с рельсом, проанализировать пути решения данной проблемы, выбрать наиболее рациональные и эффективные. Таким решением на наш взгляд, могут быть:
улучшение конструктивных характеристик путевой машины и пути, с точки зрения увеличения тяговых усилий путевых машин при производстве маневровых и тяговых работ;
механо-химическая обработка бандажей и рельсов;
управление процессами сцепления путем применения модификаторов сцепления.
Колебания механической части путевой машины и колебания верхнего строения пути взаимосвязаны и реализуются как со стороны тягового привода, так и со стороны пути с его случайными неровностями. Колебательные процессы влияют на среднее значение коэффициента сцепления, а так же могут существенно увеличить его разброс, что приближает пару сцепления "колесо-рельс" к области предельных значений коэффициента сцепления и тем самым увеличивают вероятность срыва сцепления.
Известно, что спектральный состав собственных частот колебаний механической системы путевой машины охватывает основную часть диапазона собственных частот колебаний верхнего строения пути. Это обуславливает не только их взаимное влияние, но и их влияние на динамические процессы сцепления. Таким образом, динамические качества тягового привода путевых машин можно надежно прогнозировать, лишь рассматривая динамические процессы в единой системе "экипаж - тяговый привод - верхнее строение пути" и, соответственно, исследование их физических моделей должно проходить на испытательных комплексах адекватно отражающих динамику всей исследуемой системы.
Составление единой физической модели «путевая машина – верхнее строение пути» объединением моделей входящих в нее механических систем и пары сцепления «колесо – рельс» не дают желаемого результата по адекватности реализуемых тяговых характеристик для натурного образца и его модели. Анализ показал, что причиной этого является отсутствие динамической совместимости процессов, протекающих при сцеплении колеса с рельсом и в механических системах при реализации модельного эксперимента.
Внешнее движущее усилие создает в механической системе динамические нагрузки, циркуляция которых приводит к деформациям ее элементов. При деформации в них возникают напряжения, амплитуда и частота следования которых зависит от соотношения инерционных, жесткостных и демпфирующих параметров механической системы. Поэтому, наряду с колебаниями с частотой внешней динамической нагрузки, в механической системе будут распространяться возмущающие колебания напряжений, спектр частот которых определяется частотами собственных колебаний механической системы. При этом в зависимости от технического состояния механической системы (величина развески по осям, отклонения центра тяжести от геометрического центра машины, жесткостей рессорного подвешивания колесных пар, люфты и зазоры в элементах подвижных соединений тягового привода и т.д.) внешняя динамическая нагрузка от привода генерирует в ней колебания сил и напряжений широкого частотного диапазона.
Суммарная энергия колебаний механической системы идет на изменение поведения ее инерционных масс, жесткостей связей и демпфирующих характеристик (петли гистерезисных потерь). Та часть энергии, которая идет на увеличение внутренней энергии, является "потерянной" для механической системы и передается в подсистему сцепления тяговых поверхностей колеса и рельса, изменяя поведение ее компонентов.
При комплексном физическом моделировании ФМС, так же как и при реализации принципов системного подхода, составляющие ее части, то есть механическая система и узел сцепления, моделируются отдельно, но с учетом существующей между ними взаимосвязи, которая должна быть отражена в реализуемой методике моделирования. Связь между подсистемами осуществляется путем передачи энергии, а так как вид энергии характеризуется амплитудой и частотой собственных колебаний ее источника, то в качестве условия, моделирующего данную взаимосвязь, необходимо принять и обеспечить условие динамического подобия, под которым будем понимать равенство частот собственных колебаний подсистем натуры и модели [12]. Следовательно, комплексное моделирование такой системы как "экипаж - тяговый привод - верхнее строение пути", необходимо начинать с оценки условий, обеспечивающих динамическое подобие составляющих ее частей.
Связь между подсистемами осуществляется путем передачи энергии, а так как вид энергии характеризуется амплитудой и частотой собственных колебаний ее источника, то в качестве условия, моделирующего данную взаимосвязь, необходимо принять и обеспечить условие динамического подобия. По определению динамические нагрузки являются функциями времени и зависят от ускорения, частоты и амплитуды колебаний. Поэтому равенство частот собственных колебаний натурного образца и его модели может быть принято за критерий динамического подобия механических систем.
Несмотря на большое разнообразие существующих конструкций, динамические качества любой машины могут быть исследованы по общей методике, которая базируется на законах теоретической механики и теории колебаний. Система масс расчетной схемы имеет число степеней свободы равное числу масс, и движение ее описывается таким же количеством уравнений. Если для механической системы базовой путевой машины мотовоза МПТ, выбранной для исследования, описать значения кинетической и потенциальной энергии, упростить до частотного уравнения системы, то на основе метода анализа дифференциальных уравнений движения расчетной эквивалентной схемы механической системы можно решить задачу моделирования основных динамических характеристик, получить необходимые критерии подобия и соотношения между ними.
Путевая машина от реализуемой устойчивым движением динамики может совершать самостоятельные движения в зависимости от реализуемого числа степеней свободы. Модель путевой машины представленная на рис.4.3 имеет две степени свободы, то есть может совершать как вертикальные колебания вдоль оси z(подпрыгивание), так и вращательные движения на уголвокруг поперечной центральной оси (галопирование). При этом каждое из этих движений может выполняться независимо друг от друга. Соответственно, математически свободные колебания путевой машины в вертикальной плоскости могут быть описаны законами изменения двух координатzи.
Перемещение
![]() ,
а
,
а![]() ,
,
где
![]() ,
а
,
а![]() .
.
Если обозначить массу экипажа путевой машины М, а момент инерции массы относительно поперечной центральной оси – J, то кинетическая энергия системы:
![]()
или в общем виде:
![]() (4.12)
(4.12)
Если бы система была с тремя, четырьмя и т.д. степенями свободы, то Т была бы полной квадратичной функцией трех, четырех и так далее переменных – обобщенных скоростей.
Выражение потенциальной энергии:
![]() ,
подставляя вместо
,
подставляя вместо![]() их выражения через
их выражения через![]() и
и![]() ,
получим:
,
получим:
![]() .
(4.13)
.
(4.13)
Коэффициенты
![]() называются инерционными и формируются
за счет масс и моментов инерции этих
масс;
называются инерционными и формируются
за счет масс и моментов инерции этих
масс;![]() называются упругими и выражают сочетания
жесткостей упругих элементов.
называются упругими и выражают сочетания
жесткостей упругих элементов.
Дифференциальные уравнения колебаний системы:
![]() ,
(4.14)
,
(4.14)
![]() ,
(4.15)
,
(4.15)
В данных
выражениях производные от
![]() по
по![]() и от
и от![]() по
по![]() представляются как
представляются как
![]()
![]()
После подстановки производных в уравнение (4.14) и (4.15) получим систему двух линейных дифференциальных уравнения колебаний с постоянными коэффициентами:
![]() ,
(4.16)
,
(4.16)
![]() (4.17)
(4.17)
Интегралы этих уравнений:
![]()
где
![]() и
и![]() соответственно линейная и круговая
амплитуды колебаний,
соответственно линейная и круговая
амплитуды колебаний,
![]() -
собственная частота колебаний системы,
которая может иметь столько значений,
сколько степеней свободы имеет система
(в данном случае
-
собственная частота колебаний системы,
которая может иметь столько значений,
сколько степеней свободы имеет система
(в данном случае![]() имеет два значения).
имеет два значения).
После
двойного дифференцирования выражений
![]() и
и![]() по переменной
по переменной![]() подставим их в выражения (4.16) и (4.17):
подставим их в выражения (4.16) и (4.17):
![]() ,
,
![]() .
.
Так как
![]() его можно в данных выражениях сократить
его можно в данных выражениях сократить
![]() ,
,
![]()
Величины
![]() и
и![]() отличны от нуля (иначе нет колебаний),
то определитель системы равен нулю
отличны от нуля (иначе нет колебаний),
то определитель системы равен нулю
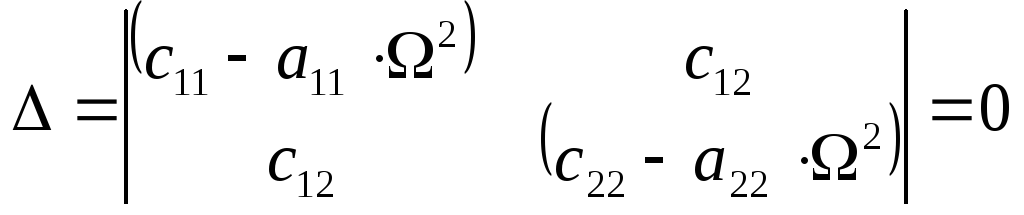 .
.
Развернув полученный определитель второго порядка получим:
![]() ;
;
![]() .
.
Если
обозначить
![]() ;
;![]()
![]() ;
;
![]() ,
то получим частотное уравнение системы
,
то получим частотное уравнение системы
![]() .
(4.18)
.
(4.18)
Из
уравнения (4.18) находим
![]() и
и![]() .
Каждой собственной частоте соответствует
соотношение между обобщенными координатами
при колебаниях с частотой
.
Каждой собственной частоте соответствует
соотношение между обобщенными координатами
при колебаниях с частотой![]() ,
которое характеризует форму колебаний
системы с этой собственной частотой, и
называются собственными формами
колебаний. После определения частот
колебаний необходимо найти отношение
амплитуд -
,
которое характеризует форму колебаний
системы с этой собственной частотой, и
называются собственными формами
колебаний. После определения частот
колебаний необходимо найти отношение
амплитуд -![]() .
Для выявления характера колебаний
необходимо раскрыть форму колебаний,
для чего должны быть заданы граничные
перемещения, то есть
.
Для выявления характера колебаний
необходимо раскрыть форму колебаний,
для чего должны быть заданы граничные
перемещения, то есть![]() и
и![]() .
.
Частоты
собственных колебаний системы находятся
в зависимости от соотношения жесткостей
упругих элементов и сочетаний масс, то
есть в общем виде
![]() .
Состояние и поведение реальной
механической системы всегда однозначны.
Поэтому, если уравнения для
.
Состояние и поведение реальной
механической системы всегда однозначны.
Поэтому, если уравнения для![]() и
и![]() имеют два решения
имеют два решения![]() ,
в соответствии с условием однозначности
требуется указать, какое из решений
соответствует действительности -
частота не может быть числом отрицательным.
Уравнение диссипативной системы можно
привести к используемым уравнениям
движения системы, если все диссипативные
силы, приложенные к сосредоточенным
массам, пропорциональны этим массам и
считаются малыми. При этом следует
отметить, что при малой диссипации
собственные частоты
,
в соответствии с условием однозначности
требуется указать, какое из решений
соответствует действительности -
частота не может быть числом отрицательным.
Уравнение диссипативной системы можно
привести к используемым уравнениям
движения системы, если все диссипативные
силы, приложенные к сосредоточенным
массам, пропорциональны этим массам и
считаются малыми. При этом следует
отметить, что при малой диссипации
собственные частоты![]() будут мало отличаться от собственных
частот
будут мало отличаться от собственных
частот![]() соответствующей консервативной системы.
Как показывают расчеты для системы
«колесо - рельс» данная разница не
превышает 5 %.
соответствующей консервативной системы.
Как показывают расчеты для системы
«колесо - рельс» данная разница не
превышает 5 %.
Из
принятого в качестве условия динамического
подобия - равенства частот собственных
колебаний модели и натуры, то есть![]() ,
получаем необходимое при реализации
модельного эксперимента условие
равенства констант подобия массы и
жесткости системы при проектировании
модели такой системы как "экипаж -
тяговый привод - верхнее строение пути".
,
получаем необходимое при реализации
модельного эксперимента условие
равенства констант подобия массы и
жесткости системы при проектировании
модели такой системы как "экипаж -
тяговый привод - верхнее строение пути".
На
основании приведенного выше анализа
можно сделать вывод, что независимо от
того, какой из методов моделирования
используется (метод анализа размерностей
или метод анализа дифференциальных
уравнений движения) для обеспечения
динамического подобия моделируемых
механических систем, необходимо, чтобы
константы подобия масс и жесткости
системы были равны друг другу, то есть
![]() или
или![]() .
При этом модельный эксперимент должен
проводиться в реальном масштабе времени
.
При этом модельный эксперимент должен
проводиться в реальном масштабе времени![]() =1,
так как, во-первых,
=1,
так как, во-первых,![]() и, соответственно,
и, соответственно,![]() .
Во-вторых, проводя исследования ФМС на
физических моделях, мы должны изготавливать
модели из тех же материалов, из которых
изготовлены оригиналы. В связи с этим
время релаксации связей механической
системы в реальных и модельных условиях
равны, что обеспечивается равенством
.
Во-вторых, проводя исследования ФМС на
физических моделях, мы должны изготавливать
модели из тех же материалов, из которых
изготовлены оригиналы. В связи с этим
время релаксации связей механической
системы в реальных и модельных условиях
равны, что обеспечивается равенством![]() =1.
=1.