

4 Теоретические и методологические основы физического моделирования
Общим для задач принятия оптимальных решений, которые возникают на разных этапах проектирования моторно-рельсового транспорта (МРТ), является то, что они могут быть сформулированы математически, как задачи нелинейной оптимизации для заданной математической модели. Решение подобных систем требует предварительной линеаризации нелинейных связей, что значительно искажает конечные результаты, особенно если в качестве оптимизируемых параметров приняты, например, сцепные качества моторно-рельсового транспорта.
Наиболее эффективным путем, исключающим процесс предварительной линеаризации, является натурный эксперимент и физическое моделирование. Применение натурного эксперимента, как правило, требует больших материальных затрат, а порой и невыполнимых технических условий связанных, например, с безопасностью движения на железнодорожном транспорте. Поэтому наиболее приемлемым способом проверки проектных решений и оптимизации параметров, как на стадии проектирования, стендовых, лабораторных, так и макетных доводочных испытаний является моделирование реальных условий эксплуатации и их воспроизведение на модели ФМС.
При решении вопросов испытаний моторно-рельсового транспорта и контроля его механических подсистем (как правило, фрикционных), а также доводки, с целью получения оптимальных служебных характеристик, требуется разработка и создание их физических моделей и построение для их реализации испытательных комплексов, позволяющих выполнять данные работы с минимальными затратами.
Замещение объекта называемого оригиналом или натурным образцом другим объектом – моделью, с целью изучения его наиболее важных для исследователя свойств и характеристик, называется моделированием. В качестве объекта могут выступать явления, процессы, системы, установки и т.д.
Основными задачами теории моделирования являются выбор моделей и перенос результатов исследования моделей на оригинал, которые решаются с помощью эффективных общих методов. Общим является то, что они базируются на теоретических принципах теории физического подобия [1].
Анализ конкретных выполненных исследователями работ по моделированию различных объектов, например, верхнего строения пути (ВСП) [2], фрикционных механических систем машин или их отдельных узлов [3], объектов электроэнергетики [4], гидравлических устройств [5] и т.д. показал, что модельные испытания являются крайне трудной задачей и пока не существует общепринятой методики, служащей основой частных специальных методов в различных областях науки и техники.
Функции теоретических основ подобия заключается в выработке методологии, направленной на упорядочение получения и обработки информации об объектах, взаимодействующих между собой и внешней средой.
В общем случае процесс моделирования можно представить состоящим из нескольких этапов:
Постановка задачи и сбор данных о реальной ФМС.
Оценка особенностей модельных испытаний.
Выбор модели в соответствии с задачами исследования.
Выбор условий и параметров исследуемой ФМС.
Исследование модели ФМС в соответствии с поставленной задачей.
Реализация данных модельных испытаний на натурном образце. Проверка результатов.
Поэтому для проведения оптимизационного исследования особенно важна правильная постановка задачи и построение на основе полученных данных модели. Модель, как правило, доступнее для исследования, нежели реальный объект. Совместное рассмотрение фактов, полученных разными исследователями и касающихся каких-то отдельных сторон функционирования модели МРТ, позволяет анализировать, например, динамику реализации сцепления или развития автоколебаний в механической системе «МРТ - ВСП " в целом и проводить эксперименты с моделью, заведомо неосуществимые на реальном объекте. Более того, некоторые объекты вообще не могут быть изучены непосредственным образом в соответствии с техническими требованиями безопасности эксплуатации или из экономических соображений.
В рамках модели всегда можно получить решения, интерпретируемые как переход из нежелательного в оптимальное для данных условий состояния исследуемой системы МРТ. Чтобы иметь возможность осуществлять такие переходы в моделируемой системе, необходимо знать, как тот или иной варьируемый параметр влияет на реальные параметры ее состояния. Знание этих характеристик позволяет говорить о постановке задачи оптимального управления.
Тип представления модели является важной составной частью оптимизационного исследования. При решении большей части технических задач используются разработанные самими исследователями аналитические или специальные имитационные модели. Независимо от выбранного типа модели требуется заранее иметь представление о том, каким образом данная модель будет реализовываться и в какой форме можно записать ее, какие средства использовать для подготовки оптимизационной задачи к решению.
При разработке модели можно использовать "принцип оптимальной неточности": модель должна быть настолько детализирована, насколько это необходимо для целей исследования, для которого ее создали [6]. Этот принцип позволяет при формировании модели учитывать только важнейшие характеристики системы, которые должны быть отражены в модели, а менее существенные в модель можно не включать. Схематически процесс оптимизации с применением моделей можно представить следующим образом (рис.4.1):
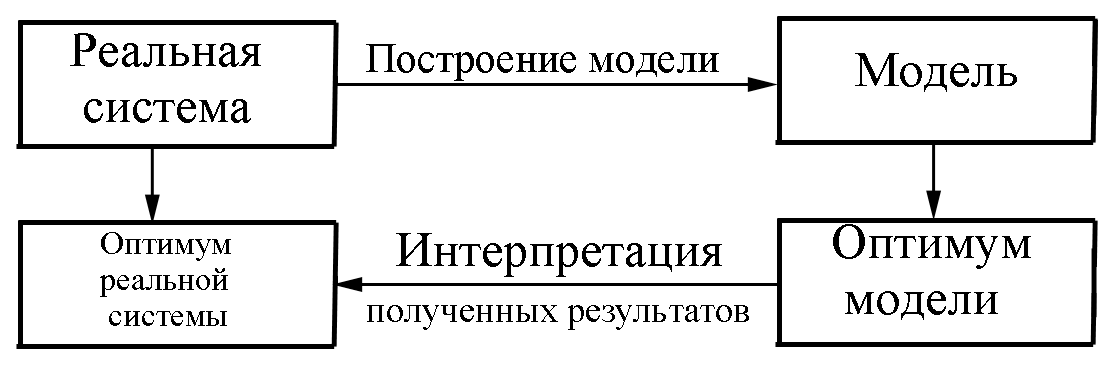
Рисунок 4.1 Применение оптимизационных моделей
В данной схеме "прямой" путь к оптимальному решению заменяется "обходным", включающим построение и оптимизацию модели, а также преобразование полученных результатов в практически реализуемую форму.
Сложность задач оптимизации заключается в том, что система должна удовлетворять необходимым экстремальным значениям большого количества параметров. Такую суперсистему создать невозможно. Поэтому наличие ряда обобщенных параметров, характеризующих устойчивое состояние механической системы МРТ, возможность их регулирования, в наилучшем виде осуществляется путем реализации обратной связи, и это можно считать основой для реализации оптимизационной задачи функционирования.
Задачу идентификации (построение модели) динамических объектов можно сформулировать следующим образом: по данным наблюдений за входными переменными должна быть построена оптимальная в некотором смысле модель. Для исследуемых механических систем априорная информация о динамическом объекте обычно является очень бедной. Поэтому приходится решать задачи выбора структуры системы, определения степени линейности и стационарности объекта, выбора информативных переменных и др.
Анализ применения физического моделирования, на основе существующих методов и принципов построения модели путем объединения моделей механических систем привода МРТ и узла сцепления «колесо – рельс» не дают желаемого результата по адекватности реализуемых процессов сцепления. И связано это с тем, что применяемые методы рассматривают систему «колесо – рельс» в лучшем случае, как имеющую относительную самостоятельность часть механической системы, поэтому в модели ФМС отсутствует динамическая совместимость процессов протекающих в контакте «колесо – рельс» и в механической системе трансмиссии. При этом возникает проблема не только раскрытия неопределенности, вносимой сцеплением, но и анализа процесса сцепления как некоторого динамического процесса в сложной преобразующей системе «ВСП – МРТ».
При изучении процессов сцепления в контакте «колесо – рельс» следует исходить из необходимости создания в модели характеристик, определенных назначением его как некоторого элемента, обеспечивающего выполнение заданных свойств функционирования машины в эксплуатации.
Чтобы выполнить данные условия необходимо:
Выполнить условия подобия функций реальной и испытываемой систем, чтобы получить в испытываемой системе те же процессы реализации сцепления при взаимодействии колеса и рельса, что и в реальной системе привода МРТ.
Выполнить подобие структур реальной и испытываемой систем, так как сцепление является тем фактором, который объединяет динамические подсистемы машин в единую динамическую механическую систему.
Следовательно, помимо описания характеристик сцепления необходимо одновременно идентифицировать упруго-диссипативные параметры динамической модели механической системы, так как процесс сцепления формирует некоторую среду, с которой взаимодействует механическая система. Это создает некоторое пространство состояния МРТ как системы, в которой взаимозависимы реакции со стороны контакта «колесо – рельс» с координатами состояния механических систем МРТ и ВСП.
Оптимальным способом проверки проектных решений и нахождение рациональных параметров, как на стадии стендовых, лабораторных, так и доводочных испытаний является физико-математическое моделирование реальных условий эксплуатации и воспроизведение их на моделях испытательных комплексов системы «ВСП – МРТ».