

Вращающий момент
Вращающееся магнитное поле, пересекая стержни ротора асинхронного двигателя, индуцирует в них ЭДС. Под действием наведенной ЭДС в роторной обмотке возникает индуцированный ток i2 (рис. 4.8).
Из рис. 4.8 кривые распределения индукции B и наведенного тока i2 по окружности ротора асинхронного двигателя приняты синусоидальными. Обе кривые имеют неизменные амплитуды Bm и I2m и остаются неподвижными одна относительно другой со сдвигом фаз ψ2.
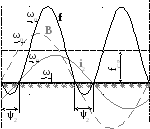
Рис. 4.8
На проводник ротора с током i2 со стороны магнитного поля статора действует сила Ампера f, направленная по касательной к окружности ротора (рис. 4.9), направление которой определяется по «правилу левой руки». Величина этой силы
![]() ,
,
где l2 – длина проводника ротора, расположенного в магнитном поле. На рис. 4.8 показана кривая распределения касательных сил f по окружности ротора и их среднее значение.
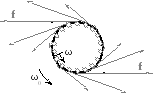
Рис. 4.9
Общую силу, действующую на ротор, найдем, умножив среднюю силу на число проводников обмотки ротора N2:
![]() .
.
Вращающий момент равен произведению силы F на плечо D/2:
![]() ,
,
где D – диаметр ротора.
Под воздействием вращающего момента начинается разгон ротора. Переходные электромагнитные и электромеханические процессы в двигателе закончатся при достижении устойчивого равновесия между вращающим моментом и моментом сил сопротивления, созданными приводными механизмами. При этом условии ротор будет вращаться с частотой ω.
Таким образом,
кривые В, i2
и f (рис. 4.8) относительно статора вращаются
с синхронной скоростью ω0,
а сила Ампера относительно ротора
вращается со скоростью (ω0-
ω). Основным
условием работы двигателя
является асинхронность
(неравенство) частот вращения ротора и
магнитного поля
(в двигателях
![]() ),так
как только в этом случае возможно
индуцирование ЭДС и возникновение
тока в обмотке ротора, следовательно,
образование вращающего
момента.
),так
как только в этом случае возможно
индуцирование ЭДС и возникновение
тока в обмотке ротора, следовательно,
образование вращающего
момента.
При неравенстве частот ротор при своем вращении скользит по магнитному полю. Скольжение ротора
![]()
где ω0, ω - угловые частоты вращения магнитного поля и ротора; n0, n- частоты вращения магнитного поля и ротора.
В
режиме идеального холостого хода (при
М
=
0) и пренебрежении
моментом холостого хода, обусловленным
механическими и магнитными
потерями в двигателе, частота вращения
ротора
![]() ,а
скольжение s
= 0.
,а
скольжение s
= 0.
При
неподвижном роторе при пуске
![]() и
скольжениеs
= 1. Таким
образом, в двигательном режиме частота
вращения ротора и его скольжение
изменяются в пределах
и
скольжениеs
= 1. Таким
образом, в двигательном режиме частота
вращения ротора и его скольжение
изменяются в пределах
![]() ;
;
![]() .
Частота
вращения ротора
.
Частота
вращения ротора
ω = ω0 (1 - s); n = n0 (1 - s).
Механическая характеристика двигателя
Механические характеристики - это зависимости s = f(M) или ω =f(M), или n = f(M). Вид экспериментальной механической характеристики представлен на рис. 4.10.
Механическая характеристика показывает, что вращающий момент имеет максимум Mмакс. Скольжение, при котором момент достигает максимального значения, называется критическим и обозначается sКР. Номинальному моменту МН, соответствующему номинальной мощности на валу, соответствуют номинальная частота ωН, номинальная частота вращения nН и номинальное скольжение sН.
![]()
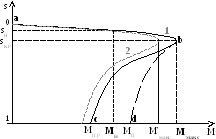
Рис. 4.10
1 – при номинальном напряжении; 2 – при пониженном напряжении
MП – пусковой момент; MП Р - расчетный пусковой момент
Для двигателей с короткозамкнутым ротором номинальное скольжение равно 0,03-0,07.
Для двигателей общепромышленного применения максимальный момент Mмакс больше номинального момента MН в 1,7-2,5 раза. Значение μ = Mмакс/MН определяет способность к перегрузке двигателя в отношении вращающего момента (приводится в паспортных данных).
Максимальный момент пропорционален квадрату напряжения сети, подведенного к обмотке статора. Поэтому понижение напряжения приводит к заметному уменьшению Mмакс. По стандартам допускается снижение напряжения в сети UС на 5 %, т.е. пониженное напряжение сети UC=0,95UН, тогда вращающий момент двигателя при пониженном напряжении:
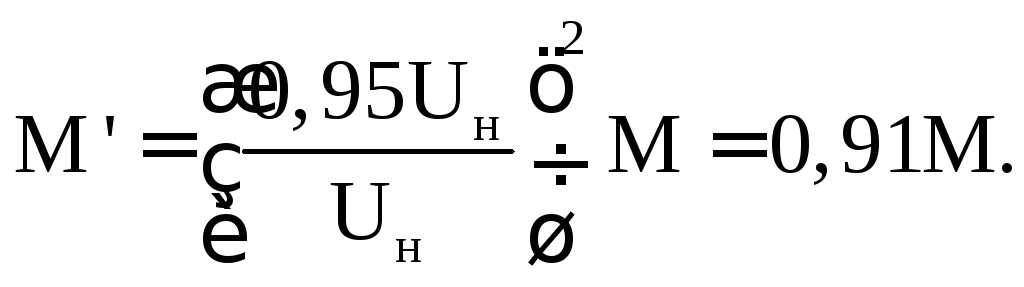
Таким образом, напряжение сети снижается на 5 %, а момент уменьшается на 9 %. Чувствительность асинхронных двигателей к изменению напряжения является их недостатком.
Механическая характеристика может быть математически описана формулой Клосса:
где
максимальный вращающий момент
Mмакс=μ
MН,
а критическое скольжение
![]() .
.
Формула Клосса позволяет построить расчетную механическую характеристику с допустимой погрешностью. Однако определение расчетного пускового момента МП Р (при s = 1) по этой формуле дает значительную погрешность. Поэтому фактический пусковой момент МП определяется только по кратности пускового момента μП = MП/MН.
Величина
![]() приводится
в паспортных данных
и для рассматриваемых двигателей
составляет
приводится
в паспортных данных
и для рассматриваемых двигателей
составляет
![]() =
0,8
—1,7 .
=
0,8
—1,7 .
Для построения механической характеристики по формуле Клосса выполним анализ зависимости М= f(s) для двух интервалов изменения s:
a) s < sкр, пренебрегая первым слагаемым в знаменателе получим М ~ s , зависимость близкая к линейной (участок а - b на рис. 4.10);
ику
ойаническую
характери![]() ,
зависимость гиперболическая (участок
b
-
с
на
рис. 4.10).
,
зависимость гиперболическая (участок
b
-
с
на
рис. 4.10).