

-SHARED-g-GMVSKI-net-Tab-TMM_KP
.pdfля) вполне определяется технологическим процессом, для выполнения которого предназначена машина, в других случаях необходимо лишь за определенный промежуток времени перевести ведомое звено из одной позиции в другую. Если в первом случае закон движения ведомого звена можно полагать заданным, то во втором – его можно выбирать. Для периода холостого хода (если таковой имеется) выбор закона движения часто определяется динамикой проектируемого механизма и производительностью машины.
Основным требованием, предъявляемым к конструкции кулачка, является условие износостойкости, или долговечности, его профиля.
Из бесконечно большого числа возможных законов движения толкателя необходимо выбрать наиболее благоприятный с точки зрения динамики работы механизма и его долговечности.
Наиболее распространенными законами движения толкателя являются параболический, косинусоидальный, синусоидальный, трапецеидальный. Более универсальным является полидинамический закон, при котором ускорение ведомого звена описывается некоторым полиномом. Для быстроходных машин с практически упругими звеньями в динамическом отношении этот закон наилучший [3, 7].
Динамика работы механизма определяется законом изменения ускорения (сила инерции пропорциональна ускорению). Если в отдельных точках ускорение мгновенно изменяется на конечную величину, то при работе механизма будут иметь место так называемые мягкие удары. В точках, где ускорения теоретически равны бесконечности (при линейном законе движения), имеют место жесткие удары, и это означает, что силы инерции будут равны бесконечности, чего не сможет выдержать ни один механизм. Практически ускорения не могут быть равны бесконечности, благодаря амортизирующему эффекту упругости звеньев. Тем не менее, в закон движения вводятся переходные кривые, позволяющие осуществить плавный переход на участках сопряжения двух линейных законов движения.
Жесткие удары допустимы только в тихоходных механизмах и при малых массах толкателя и связанных с ним частей. Мягкие удары допускаются для кулачков, делающих менее 2000 об/мин.
При заданном законе перемещения толкателя (линейного или углового для коромыслового толкателя), определяемом технологическим процессом, скорости и ускорения получают дифференцированием закона движения толкателя.
Часто кулачковые механизмы проектируются по заданному закону изменения аналога ускорения. Тогда интегрированием этого закона, и исходя из начальных условий, определяют аналог скорости и закон движения ведомого звена.
101
|
Уравнения наиболее часто используемых законов движения толка- |
||||||
теля, а также аналогов скорости и ускорения приведены в работах [1, 2, |
|||||||
3, 11, 17, 18]. |
|
|
|
|
|
|
|
|
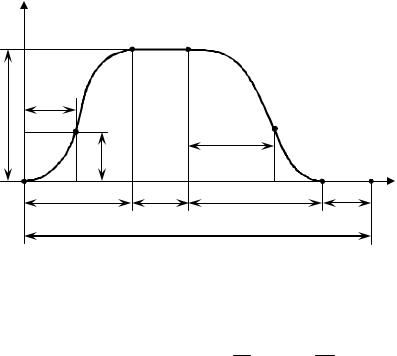
На рис. 9.5 показан типовой график движения толкателя S или θ по |
||||||
углу поворота кулачка ϕ и ниже приведены уравнения для некоторых |
|||||||
его законов [12]. |
|
|
|
|
|
||
|
S, (θ) |
|
|
|
|
|
|
|
h |
x |
|
|
|
|
|
|
, |
|
|
i |
|
|
|
|
max |
|
|
|
|
|
|
|
|
i |
|
x |
|
|
|
|
S |
|
|
|
|
||
|
|
|
y |
|
|
φ(t) |
|
|
|
|
|
|
|
|
|
|
|
|
φп |
φвв |
φо |
φнв |
|
|
|
|
|
φц (L) |
|
|
|
|
|
Рис. 9.5. Типовой график движения толкателя: |
|
||||
S – |
линейное |
перемещение |
толкателя; |
θ – угловое |
перемещение |
толкателя; |
|
ϕ(t) |
– угол (время) поворота кулачка; ϕп |
– фаза подъема (удаления); |
ϕвв – фаза |
||||
верхнего выстоя; ϕо |
– фаза опускания (приближения); ϕнв – фаза нижнего выстоя; |
||||||
ϕц – цикловой угол; h – высота графика ( h = S или h = |
θ , где µs и µθ – мас- |
||||||
|
|
|
|
|
µs |
µθ |
|
штабы по оси ординат S, θ); L – длина графика |
|
|
|||||
Закон движения толкателя – прямая линия:
|
|
|
S |
max |
|
|
|
|
x |
|
1 |
|
|
|
|
|
|
|
||||
|
S = |
|
± Smax |
|
|
− |
2 |
. |
|
|
|
|
|
(9.17) |
||||||||
|
|
|
ϕ |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Закон движения толкателя – квадратичная парабола: |
|
|||||||||||||||||||||
|
Smax |
|
|
|
|
|
|
x |
|
1 |
|
|
|
x |
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
S = |
± 2S |
|
|
− |
|
1− |
− |
|
|
. |
(9.18) |
|||||||||||
2 |
max |
|
|
2 |
|
|
2 |
|
|
|||||||||||||
ϕ |
ϕ |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В этих формулах знак “+” – на фазе подъема ( ϕп), знак “–” – на фа- |
||||||||||||||||||||||
зе опускания ( ϕо ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закон движения толкателя – косинусоида: |
|
|
|
|
|
|
||||||||||||||||
|
S = |
S |
max |
|
|
|
|
|
x |
|
|
|
|
|
|
|||||||
|
|
|
1mcosπ |
|
. |
|
|
|
|
|
(9.19) |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
ϕ |
|
|
|
|
|
|
||||||
102
Здесь на фазе подъема (ϕп ) знак “–”, на фазе опускания (ϕо ) знак “+”. Взависимостях (9.17), (9.18), (9.19) принятыследующиеобозначения:
S – представляет собой текущие значения Si или θi; Smax – максимальный ход толкателя S или θ (см. рис. 9.5); x – текущее значение угла поворота кулачка ϕ1i :
на фазе подъема x = ϕ1i ,
на фазе опускания x = ϕ1i −(ϕп −ϕвв),
ϕ – численное значение соответствующего фазового угла. (Парабола или косинусоида могут быть построены графически, как показано далее. Графики аналогов скорости и ускорения могут быть построены методом графического дифференцирования.)
9.6. Определение размеров, профилирование и силовой расчет кулачкового механизма
Основными размерами кулачковых механизмов рассматриваемого типа являются радиус кулачковой шайбы r0, величина смещения е (см. рис. 9.2), межосевое расстояние l0 (для коромыслового толкателя, рис. 9.3), длина коромысла l (назначается конструктивно).
Максимальный радиус кулачка r0min (из условия недопущения на фазе подъема заклинивания) может быть определен аналитически [2, 3, 4, 16 и др.] или графически [1–3, 7–9, 11, 16–18]. Для этого необходимо иметь закон движения толкателя по углу поворота кулачка S = S(ϕ) или
θ = (ϕ), длину коромысла l (для коромыслового толкателя, рис. 9.3). Минимальный радиус кулачка r0min (из условия недопущения на
фазе подъема заклинивания) может быть определен аналитически [2, 3, 4, 16 и др.] или графически [1–3, 7–9, 11, 16–18]. Для этого необходимо иметь закон движения толкателя по углу поворота кулачка S = S(ϕ) или θ = θ(ϕ), длину коромысла l (для коромыслового толкателя) и минимальные углы передачи движения на фазах подъема и опускания
( γпmin , γоmin ).
Порядок определения rо min при графическом решении задачи: 1. Вычерчивается в масштабе график Sc = Sc (ϕ).
(Точкой C обозначен конец толкателя – центр ролика, как показано на рис. 9.2 и 9.3).
Для коромыслового толкателя линейное перемещение точки С конца толкателя
Sc = l θ, мм, |
(9.20) |
где l – длина коромысла, мм;
θ – размах (ход) коромысла в радианах:
103
θ = |
θ° π |
. |
(9.21) |
|
180° |
||||
|
|
|
В зависимости от формата выбирается линейный масштаб перемещения µS [мм/мм]. Тогда высота графика h (см. рис. 9.5):
hc = Sc / µS , мм. |
(9.22) |
(Линейный масштаб выбирается из ряда стандартных значений: 1; 2; 2,5; 4; 5; 10 и т. д.; или 0,1; 0,2; 0,25; 0,5 и т. д.).
Этот график одновременно будет являться и графиком углового перемещения коромысла θ по углу поворота кулачка, т. е. θ=θ(ϕ) в масштабе
|
µθ = θ/ h = Sc / L h , 1/мм (рад/мм). |
(9.23) |
|||
Масштабы по оси абсцисс: |
|
|
|
||
угловой масштаб |
µϕ = |
2π |
, 1/мм; |
(9.24) |
|
L |
|||||
|
|
|
|
||
масштаб времен (при заданной частоте вращения кулачка n об/мин)
µt = |
60 |
, с/мм, |
(9.25) |
|
n L |
||||
|
|
|
где L – длина графика S–ϕ (принимается в зависимости от формата чертежа).
Примечания:
1.На графике закона перемещения толкателя, на основании которого в дальнейшем будет построен профиль кулачка, должно быть не менее 8 точек как на фазе подъема, так и на фазе опускания.
2.Если закон движения построен графически (косинусоида, парабола), то на листе необходимо показать метод построения этих кривых (см. выполненные чертежи на вкладке).
2. Размеры кулачка (наименьший радиус, величина смещения, расстояние между центрами вращения кулачка и коромысла) определяются из графика Zi = Zi(S) в прямоугольной системе координат для поступательно движущегося толкателя или Zi = Zi(θ) в полярной системе координат для коромыслового толкателя (S – линейное перемещение толкателя, θ – угол поворота коромысла).
Отрезки Zi пропорциональны первой производной S ′ = ds / dϕ или θ′ = dθ/ dϕ (аналоги скорости толкателя), поэтому необходимо построить графики первой производной S′ или θ′ и на основании теории определить их следующим образом:
104

– при поступательно движущемся толкателе |
|
|||||||||||
|
|
Zi = S′ µl = A yi , мм, |
|
|
(9.26) |
|||||||
– при коромысловом толкателе |
|
|
|
|
|
|
|
|
|
|
||
|
|
Zi =l θ′/ µl |
= B |
|
i , мм. |
|
(9.27) |
|||||
y |
|
|||||||||||
Здесь |
|
– ординаты графика S′− ϕ |
|
|
или θ′−ϕ. |
|
||||||
yi |
|
|
|
|||||||||
Коэффициенты А и В определяются из выражений: |
|
|||||||||||
|
|
A = µS ′ / µl = |
|
|
|
µS |
|
, |
|
(9.28) |
||
|
|
|
µl µϕ H1 |
|
||||||||
|
|
|
|
|
|
|
||||||
|
|
B = L µθ′ / µl = |
|
L µθ |
|
, |
(9.29) |
|||||
|
|
|
µl µϕ H1 |
|||||||||
|
|
|
|
|
|
|
|
|||||
где µS′ , µθ′ – масштабы графиков S′− ϕ или θ′−ϕ;
µS , µθ, µϕ – масштабы перемещения толкателя, угла поворота ко-
ромысла, угла поворота кулачка графиков S – ϕ или θ – ϕ;
µl – масштаб перемещения толкателя на графике Zi – S или изо-
бражения коромысла на графике Zi – θ (это масштаб, в котором будут получены размеры кулачка. Удобнее принимать µl = µS );
l – длина коромысла;
H1 – полюсное расстояние при графическом дифференцировании графиков S – ϕ или θ – ϕ.
Если коэффициенты А или В будут равны единице, тогда Zi = yi ,
что значительно упрощает построение графиков Zi = S или Zi = θ. Приняв А=1 или В=1, из выражений (9.28, 9.29) получим величины полюсных расстояний:
H A1 = µS |
/ µl |
µϕ, мм, |
(9.30) |
|
HB1 = L µθ / µl µϕ, мм. |
||||
|
||||
Приняв полюсное расстояние H, методом графического дифференцирования (метод касательной или метод хорд) строятся графики первой производной S'= dS dϕ или θ'= dθ
dϕ или θ'= dθ dϕ – аналоги скоростей. Мас-
dϕ – аналоги скоростей. Мас-
штабы графиков:
µ |
′ = µ |
|
= |
|
µs |
|
, |
мм |
; |
|
|
µϕ H A1 |
мм |
|
|||||||
s |
|
ds / dϕ |
|
|
|
|
||||
µθs = µdθ/ dϕ = |
|
µθ |
|
мм |
|
|
||||
|
|
, |
мм. |
(9.31) |
||||||
|
µϕ HB1 |
|||||||||
Масштабы линейной и угловой (для коромыслового толкателя) скоростей этих графиков определяются из выражений:
105
µv = |
|
µS |
, |
мм/ с |
или |
м/ с |
, |
|
µϕ H A1 |
мм |
мм |
||||||
|
|
µθ |
|
1/ c |
|
|
(9.32) |
|
|
|
|
|
|
|
|||
µω = |
|
|
, |
мм. |
|
|
|
|
|
µt HB1 |
|
|
|
|
|||
3. На основании графиков S′−ϕ или θ′−ϕ определяются значения
отрезков Z по формулам (9.26), (9.27) и строятся графики Z=Zi(S) в прямоугольной системе координат для поступательно движущегося толкателя или Z=Zi(θ) в полярной системе координат для коромыслового толкателя.
При построении этих графиков следует иметь в виду, что направление отрезков Z определяется по следующему правилу: необходимо вектор скорости толкателя повернуть на 90° в сторону вращения кулачка.
По заданным углам давления или углам передачи движения находится область возможных положений центра вращения кулачка и определяются размеры кулачкового механизма: радиус кулачка, величина смещения, расстояние между центрами вращения кулачка и коромысла. (Для нахождения области возможных положений центра вращения кулачка под заданными углами передачи движения γ на фазах подъема и опускания проводятся касательные к графику Zi =Zi (ϕ) или лучи
кграфику Zi =Zi (θ).)
4.При выбранных размерах кулачка и заданном законе движения толкателя, используя метод обращения движения, строят теоретический профиль кулачка.
5.Выбрав (определив) радиус ролика rp, строят практический профиль кулачка (см. лист 3 и 4 вклейки).
6.Для определения линейного или углового ускорения (необходимых при определении силы или момента инерции толкателя и связан-
ных с ним деталей для силового расчета, для подбора пружины при силовом замыкании) строится график a = a(t) или ε = ε(t), для чего следу-
ет продифференцировать график v = v(t) или ω = ω(t). Масштабы этих графиков будут следующими:
µa = |
µv |
, |
м/ с2 |
, |
|||
µt H2 |
мм |
||||||
|
|
|
µω |
|
|
1/ с2 . |
(9.33) |
µ |
ε |
= |
|
, |
|
||
µt H2 |
|
||||||
|
|
|
мм |
|
|||
Здесь H2 – полюсное расстояние при вторичном дифференцировании.
106
Масштабы аналогов ускорений:
µS ′′ = µ |
2 |
|
2 |
= |
µS ′ |
, |
мм |
; |
|
µϕ H2 |
мм |
||||||
|
d |
s / dϕ |
|
|
|
(9.34) |
||
|
|
|
|
|
µθ′ |
|
мм |
|
µθ′′ = µ |
2 |
|
2 |
= |
, |
. |
||
|
µϕ H2 |
мм |
||||||
|
d |
θ/ dϕ |
|
|
|
|
7. Выбрав положение центра вращения кулачка (в области возможных его положений) и соединив его с концами отрезков Zi на графиках Zi =Zi (S) или Zi =Zi (θ), определяют углы передачи движения γi и
строят график γ = γ(ϕ).
8.Как было указано ранее, для 2–3 точек на фазе подъема и опускания толкателя определяются координаты профиля аналитически (разд. 9.3).
9.Для дальнейшего расчета на прочность деталей кулачкового механизма выполняется силовой расчет – определяются силы, действую-
щие на звенья механизма, реакции в кинематических парах FR0,1, FR1,2, FR0,2 и величина уравновешивающего момента (Mb), приложенного к кулачку.
Силовой расчет методом планов сил выполняется в обычном порядке: расставляются внешние силы, приложенные к звеньям механизма (силы и моменты сопротивления, силы тяжести и силы инерции, если они существенны и др.), реакции в кинематических парах; составляется уравнение равновесия для толкателя, представляющего группу Ассура
икулачка (начального механизма), в форме сил или моментов и определяются искомые величины из планов сил и уравнений.
В заданиях может быть предусмотрено определение координат точек профиля аналитическим методом по формулам (9.1–9.5, 9.10–9.13), определение характеристики пружины.
107

10. КРАТКИЕ УКАЗАНИЯ ПО СОСТАВЛЕНИЮ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
Пояснительная записка является техническим документом и представляет неотъемлемую часть курсового проекта (работы), в которой поясняется устройство исследуемого или проектируемого механизма (машины), дается обоснование принятого метода исследования или расчета, приводятся результаты исследования или расчета прочности, износостойкости и т. д. Она должна содержать задание с исходными данными, основной текст, заключение, список литературы и оглавление (по ГОСТ 2.105–68 оглавление рекомендуется помещать в начале документов).
Пояснительная записка пишется чернилами одного цвета (черными или синими) аккуратным четким разборчивым почерком на одной стороне стандартного листа писчей бумаги формата А4 (размер 210×297 мм) по ГОСТ 2.301–68 или СТ СЭВ 1181–78. (В учебных проектах допускается использовать обе стороны листа).
На каждом листе вычерчивается рамка на расстоянии 20 мм от границы листа с левой и по 5 мм с остальных сторон. В нижнем правом углу вычерчивается маленькая рамка шириной 10 мм и высотой 15 мм, которая делится на две части – 8 мм сверху и 7 мм снизу. В верхней части этой рамки пишется слово “Лист”, а в нижней – нумерация листов (страниц) записки. Перед началом больших разделов (частей) помещается лист с угловым штампом (основной надписью), в котором пишется содержание раздела, например: “Кинематическое исследование механизма”, “Силовой расчет” и т. д. Листы записки подшиваются в обложку из плотной бумаги ссоответствующей надписью (см. прил. IV). Ниже даны основные положения, которыми следует руководствоваться при составлении пояснительной записки1.
В начале записки помещается задание со всеми данными и техническими условиями (прил. V, VI, VII).
Во введении указывается назначение механизма, краткое описание его работы и отдельных звеньев во взаимодействии с рабочим процессом.
Основной текст в соответствии с ГОСТ 2.105–68 для большего удобства чтения путем увеличения интервалов между строками, разме-
1 Более подробно правила оформления технических документов изложены в работе: Мурин А. В. Оформление пояснительных записок курсовых проектов и заданий. Томск: Изд-во ТПИ, 1978.
108
ров шрифта разбивается на разделы (части), подразделы, пункты (параграфы) и обозначается арабскими цифрами, например:
1.СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
2.КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА
2.1.Кинематическое исследование механизма методом планов
ит. д. (следует обратить внимание – точки в конце заголовка, если он состоит из одного предложения, не ставятся!). Подразделы и пункты обозначаются: 1.1., 1.2., 1.2.1., 1.2.2., 2.1.1., 2.1.2., 2.2., 2.3., 2.3.1., 2.3.1.
ит. д. Заголовки пишутся с красной строки, должны быть краткими
исоответствовать содержанию. Наименование разделов пишется прописными буквами, подразделов и пунктов – строчными (кроме первой прописной). Переносы слов в заголовках не допускаются. Нельзя писать заголовок последней строкой страницы, т. е. без текста.
Расстояние между текстом и заголовком должно быть 10 мм (т. е. равно примерно удвоенному расстоянию между строками текста).
Если очередной раздел пишется на одном листе с текстом предыдущего раздела, расстояние между последней строкой текста и последующим заголовком должно быть 15 мм. Если текст заголовка состоит из нескольких строк, то расстояние между ними принимается таким же, как в тексте.
В начале каждого раздела формулируются цели и задачи, а также характеризуются методы их решения. Затем в логическом порядке излагаются решения задач, которые сопровождаются необходимыми пояснениями, расчетными схемами, эскизами, непосредственным расчетом, приводятся обоснования выбора тех или иных параметров, коэффициентов с обязательной ссылкой на литературный источник, выводы.
Изложение в тексте ведется в обезличенной форме (…принимается, …выбирается, …определяется…) либо от первого лица множественного числа (…принимаем, …выбираем, …определяем…) и должно быть технически грамотным, лаконичным, т. е. предельно кратким, выразительным и точным, но в то же время вполне ясным, чтобы его можно было однозначно понять.
Текст записки для лучшего чтения разбивается на абзацы. Абзац – часть текста от одной красной строки до следующей, где излагается новая мысль или утверждение.
В тексте, за исключением таблиц, не допускаются сокращения слов, например, “мех-м” вместо “механизм”, “кинем-кий” вместо “кинематический”, “ф-ла" вместо “формула” и другие; следует употреблять только принятые в технической литературе термины, обозначения и со-
109
кращения, например: Н (ньютон), мм (миллиметр), кг (килограмм), т. е. (то есть) и др.
Такие знаки, как №, % и другие можно применять только с цифрами (№ 12, 30 %), если же цифра отсутствует, то писать надо словами: номер, процентит. д.
Математические знаки =, <, ≥ и другие применяются лишь в формулах, а не в тексте. Так, например, нельзя писать: “относительное удлинение =12 %”, следуетписать– “относительноеудлинениеравно12 %”.
Не допускается сочетание буквенных обозначений и слов. Например, нужно писать “…диаметр вала равен 35 мм”, но нельзя писать “…d (или ) вала =35 мм”.
Эскизы, чертежи, схемы, приводимые в пояснительной записке, выполняются карандашом либо тушью (чернилами) четко, аккуратно с соблюдением всех правил технического черчения (в отдельных случаях для большей ясности они могут выполняться без соблюдения масштаба).
Рисунки и таблицы нумеруются по главам и пишутся в такой форме: в разделе 1 – “Рис. 1.1”, “Рис. 1.2”, “Таблица 1.1”, “Таблица 1.2”, в разделе 2 – “Рис. 2.1”, “Рис. 2.2”, “Таблица 2.1”, “Таблица 2.2” и т. д. (Если в записке только один рисунок или таблица, то им номер не присваивается.) На приводимые в тексте рисунки или таблицы должны быть обязательно ссылки.
Ссылки на рисунки и таблицы, приводимые в записке, даются в тексте в круглых скобках, например: “…согласно схеме (рис. 2.4) …”, “…из графика перемещения (рис. 3.2) …”.
В том случае, если в тексте перед ссылкой на рисунок или таблицу стоит предлог, скобки опускаются и пишется так: “…из рис. 1.3 видно, что …”, “…кинематическая схема механизма показана на рис. 1.6…”, “…в соответствии с данными табл. 3.3 принимаем... ”.
Раздел или пункт не должны начинаться с таблицы. Таблице должен в обязательном порядке предшествовать текст, например:
“1. Структура механизма
Структурный анализ и структурный состав механизма, изображенного на рис. 1.1, представлены в табл. 1 и 2”.
Или “…Основные геометрические параметры зубчатых колес представлены в табл. 1.6” и т. д.
В тексте следует избегать повторений. Так, при многократном определении одних и тех же величин, например, при построении планов скоростей, ускорений для ряда положений механизма, достаточно подробно рассмотреть решение этой задачи на одном-двух примерах, указать, что для остальных случаев задача решается аналогично, а результаты приводятся в соответствующей таблице.
110