

38 Нарисуйте схему, обеспечивающую динамическое торможение асинхронной машины
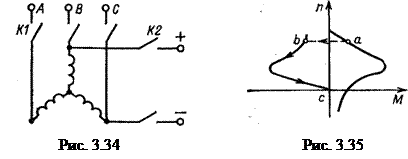
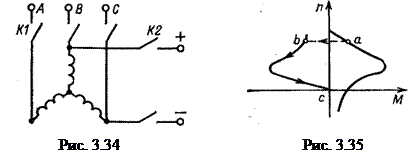
Динамическое торможение. Этот способ осущ-ся путем отключения статора от сети переменного тока и включения обмотки статора на сеть постоянного тока (рис. 3.34). В двигательном режиме замкнуты контакты К1 и разомкнуты контакты К2. В тормозном режиме контакты К1 разомкнуты, а К2 замкнуты. В результате МДС статора создает неподвижное магнитное поле.
Взаимодействие магнитного поля статора с током ротора создает на валу двигателя тормозной момент. Механические тормозные характеристики показаны рис. 3.35. В этом случае ротор тормозится до полной остановки без дополнительных устройств.
39 Нарисуйте схему динамического торможения мпт последовательного возбуждения с самовозбуждением.
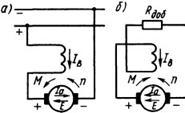
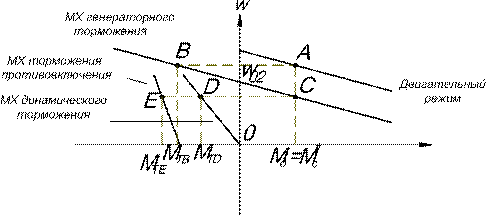
Рис. 10.65. Схемы машины с последовательным возбуждением в режимах
двигательном (а) и динамического торможения (б)
40 Приведите схему динамического торможения МПТ параллельного возбуждения
.
Динамическое
торможение возникает в тех случаях,
когда якорь двигателя отключается от
сети и замыкается на сопротивление
динамического торможения Rд.т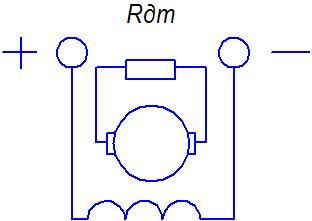
41 Приведите вид мех-ой ха-ки торможения противовключением МПТ последовательного возбуждения «набросом» нагрузки.

Рисунок 1.2-Механические характеристики двигателя постоянного тока последовательного возбуждения при торможении противовключением
42 Приведите вид мех-ой хар-ки асинхронной машины, работающей в режиме динамического торможения.
Взаимодействие магнитного поля статора с током ротора создает на валу двигателя тормозной момент. Механические тормозные характеристики показаны рис. 3.35. В этом случае ротор тормозится до полной остановки без дополнительных устройств.
43 Как определяется диапазон регулирования скорости вращения электропривода
Диапазон регулирования – это отношение возможных установившихся скоростей D=wmax/wmin.
На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости.
44 От чего зависит стабильность угловой скорости электропривода?
Стабильность угловой скорости – характеризуется изменением угловой скорости при заданном отключении момента нагрузки и зависит от жесткости механической характеристики. Она тем выше, чем больше жесткость характеристики.