В зависимости от формата выбирается линейный масштаб перемещения μS [мм/мм]. Тогда высота графика h (см. рис. 6.6):
(Линейный масштаб выбирается из ряда стандартных значений: 1; 2; 2,5; 4; 5; 10 и т. д.; или 0,1; 0,2; 0,25; 0,5 и т. д.).
Этот график одновременно будет являться и графиком углового перемещения коромысла θ по углу поворота кулачка, т. е. θ=θ(ϕ) в масштабе
|
μθ |
=θ / h = Sc / L h , 1/мм (рад/мм). |
(6.49) |
|
Масштабы по оси абсцисс: |
2π |
|
|
|
угловой масштаб |
μϕ = |
, 1/мм; |
(6.50) |
|
L |
|
|
|
|
|
масштаб времен (при заданной частоте вращения кулачка n об/мин)
|
μt = |
60 |
, с/мм, |
(6.51) |
|
n L |
|
|
|
|
где L – длина графика S(ϕ) (принимается в зависимости от формата чертежа).
Примечания:
1.На графике закона перемещения толкателя, на основании которого в дальнейшем будет построен профиль кулачка, должно быть не менее 8-ми точек, как на фазе подъема, так и на фазе опускания.
2.Если закон движения построен графически (косинусоида, парабола), то на листе необходимо показать метод построения этих кривых.
2. Размеры кулачка (наименьший радиус, величина смещения, расстояние между центрами вращения кулачка и коромысла) определяются из графика Zi = Zi(S) в прямоугольной системе координат для поступательно движущегося толкателя или Zi = Zi(θ) в полярной системе координат для коромыслового толкателя (S – линейное перемещение толкателя, θ – угол поворота коромысла).
Отрезки Zi пропорциональны первой производной S′ = dS / dϕ или θ′ = dθ / dϕ (аналоги скорости толкателя), поэтому необходимо построить графики первой производной S′ или θ′ и на основании теории оп-
ределить их следующим образом: |
|
– при поступательно движущемся толкателе |
|
Zi = S′ μl = A yi , мм, |
(6.52) |
– при коромысловом толкателе |
|

|
|
Zi = l θ′/ μl |
= B |
y |
i , мм. |
(6.53) |
Здесь |
|
′ |
|
|
′ |
|
|
|
|
|
yi – ординаты графика S (ϕ) |
или θ (ϕ) . |
|
Коэффициенты А и В определяются из выражений:
|
A = μS′ / μl = |
|
|
μS |
|
, |
|
(6.54) |
|
|
|
|
|
|
|
|
|
μl μϕ H1 |
|
|
|
B = L μθ′ / μl |
= |
L μθ |
|
|
, |
(6.55) |
|
μl μϕ |
H1 |
|
|
|
|
|
|
|
где μS′, μθ′ – масштабы графиков |
|
|
′ |
|
′ |
|
|
|
S (ϕ) или θ |
(ϕ) ; |
|
μS , μθ , μϕ – масштабы перемещения толкателя, угла поворота ко-
ромысла, угла поворота кулачка графиков S(ϕ) или θ(ϕ);
μl – масштаб перемещения толкателя на графике Zi(S) или изобра-
жения коромысла на графике Zi(θ) (это масштаб, в котором будут получены размеры кулачка. Удобнее принимать μl = μS );
l – длина коромысла;
H1 – полюсное расстояние при графическом дифференцировании графиков S(ϕ) или θ(ϕ).
Если коэффициенты А или В будут равны единице, тогда Zi = yi ,
что значительно упрощает построение графиков Zi = S или Zi = θ. Приняв А=1 или В=1, из выражений (6.54, 6.55) получим величины полюсных расстояний:
|
H A1 |
= μS / μl μϕ , мм, |
(6.56) |
|
H B1 = L μθ / μl μϕ , мм. |
|
|
Приняв полюсное расстояние H, методом графического дифференцирования (метод касательной или метод хорд) строятся графики первой производной S'= dS dϕ или θ' = dθ
dϕ или θ' = dθ dϕ – аналоги скоростей. Мас-
dϕ – аналоги скоростей. Мас-
штабы графиков:
|
|
|
|
|
|
|
|
|
|
|
μs′ = μds / dϕ = |
|
μs |
|
, |
мм |
; |
|
μϕ H A1 |
мм |
|
|
|
|
|
|
|
μθs = μdθ / dϕ = |
|
μθ |
|
, |
|
мм |
. |
(6.57) |
|
μϕ H B1 |
|
|
мм |
|
|
|
|
|
|
|
Масштабы линейной и угловой (для коромыслового толкателя) скоростей этих графиков определяются из выражений:
|
|
|
|
|
|
|
|
|
|
|
|
μv = |
|
μS |
, |
|
мм/ с |
|
или |
м/ с |
, |
μϕ H A1 |
|
мм |
мм |
|
|
|
|
(6.58) |
|
|
μθ |
|
1/ c |
|
|
|
|
μω = |
|
, |
. |
|
|
|
|
|
μt H B1 |
|
мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
3. На основании графиков S′−ϕ или θ′−ϕ определяются значения |
отрезков Z по формулам |
(6.52), |
(6.53) |
и строятся графики Z=Zi(S) |
в прямоугольной системе координат для поступательно движущегося толкателя (рис. 6.7) или Z=Zi(θ) в полярной системе координат для коромыслового толкателя.
τ |
b2 |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
τ' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ пмин |
|
|
|
|
|
|
|
|
S' |
|
|
|
|
|
γ омин |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O" |
|
R0 min |
|
|
|
|
|
|
|
|
|
|
|
|
O' |
|
|
|
|
|
|
τ' |
|
|
|
τ |
|
|
O |
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
Рис. 6.7. К определению минимального размера кулачка
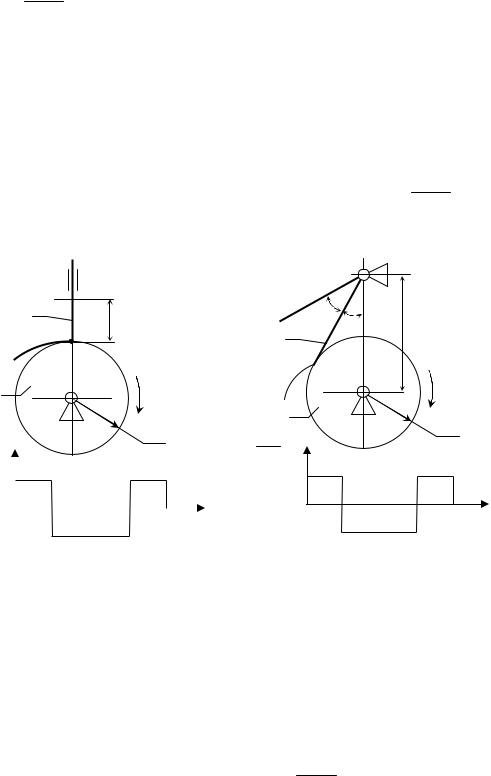
При построении этих графиков следует иметь в виду, что направление отрезков Z определяется по следующему правилу: необходимо вектор скорости толкателя повернуть на 90° по направлению вращения кулачка.
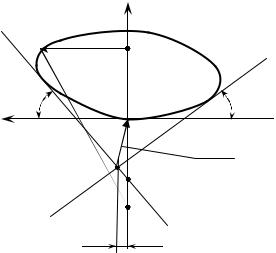
По заданным углам давления или углам передачи движения находится область возможных положений центра вращения кулачка, и определяются размеры кулачкового механизма: радиус кулачка, величина смещения, расстояние между центрами вращения кулачка и коромысла. Для нахождения области возможных положений центра вращения кулачка под заданными углами передачи движения γ на фазах подъема и опускания проводятся касательные к графику Zi =Zi (ϕ) или лучи к графику Zi =Zi (θ).
4.При выбранных размерах кулачка и заданном законе движения толкателя, используя метод обращения движения, строят теоретический профиль кулачка.
5.Выбрав (определив) радиус ролика rp, строят практический профиль кулачка.

6. Для определения линейного или углового ускорения (необходимых при определении силы или момента инерции толкателя и связанных с ним деталей для силового расчета, для подбора пружины при силовом замыкании) строится график a = a(t) или ε = ε(t), для чего сле-
дует продифференцировать график v = v(t) или ω = ω(t). Масштабы этих графиков будут следующими:
μa |
= |
|
μv |
|
, |
м с2 |
, |
|
|
μt |
H2 |
мм |
|
(6.59) |
|
|
|
|
|
|
|
|
|
|
|
μ |
|
|
|
1 с2 |
|
|
|
|
|
|
|
|
|
|
|
|
με |
= |
|
|
ω |
|
|
, |
|
. |
|
|
|
μt |
H2 |
|
мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь H2 – полюсное расстояние при вторичном дифференцировании. |
Масштабы аналогов ускорений: |
|
μS′ |
|
|
|
мм |
|
μS′′ = μ |
2 |
|
|
2 |
= |
|
|
|
|
, |
; |
|
|
μϕ H |
|
|
мм |
|
d |
s / dϕ |
|
|
2 |
|
|
(6.60) |
|
|
|
|
|
|
|
|
μθ′ |
|
|
|
мм |
μθ′′ = μ |
2 |
|
|
2 |
= |
|
|
|
|
, |
. |
|
|
μϕ H |
|
|
мм |
|
d θ / dϕ |
|
|
2 |
|
|
|
7. Выбрав положение центра вращения кулачка (в области возможных его положений) и соединив его с концами отрезков Zi на графиках Zi =Zi (S) или Zi =Zi (θ), определяют углы передачи движения γi и
строят график γ =γ(ϕ).
8. Как было указано ранее, для 2–3 точек на фазе подъема и опускания толкателя определяются координаты профиля аналитически
(разд. 6.3.3).
9. Для дальнейшего расчета на прочность деталей кулачкового механизма выполняется силовой расчет – определяются силы, действующие на звенья механизма, реакции в кинематических парах FR0,1, FR1,2, FR0,2 и величина уравновешивающего момента (Mb), приложенного к кулачку.
Силовой расчет методом планов сил выполняется в обычном порядке: расставляются внешние силы, приложенные к звеньям механизма (силы и моменты сопротивления, силы тяжести и силы инерции, если они существенны и др.), реакции в кинематических парах; составляется уравнение равновесия для толкателя, представляющего группу Ассура, и кулачка (начального механизма), в форме сил или моментов и определяются искомые величины из планов сил и уравнений.
ЗАДАЧИ 173–180
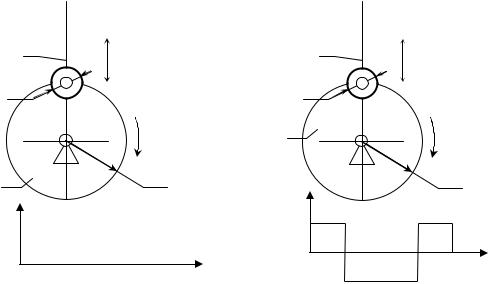
173. Спроектировать несмещенный кулачковый механизм с поступательно движущимся толкателем, снабженным роликом. Построение провести для 12 положений механизма. Известно, что полный ход толкателя h=42 мм; закон изменения первой производной от функции по-
ложения толкателя задан графиком |
ds2 |
= Φ(ϕ |
), радиус ролика |
|
|
1 |
|
dϕ1 |
|
r=10 мм, минимальный радиус кулачка R0=25 мм, фазовый угол подъема φп=π , фазовый угол опускания ϕо=π.
174. Спроектировать несмещенный кулачковый механизм с поступательно движущимся толкателем, снабженным роликом. Построение провести для 12 положений механизма. Известно, что полный ход толкателя h=36 мм; закон изменения второй производной от функции по-
ложения толкателя задан графиком |
d 2 s2 |
= Φ(ϕ |
1 |
), радиус ролика |
|
|
dϕ22 |
|
|
|
|
r=10 мм, минимальный радиус кулачка R0=25 мм, фазовый угол подъема φп=π , фазовый угол опускания ϕо=π.
|
|
|
C |
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
A |
|
|
ω1 |
1 |
A |
|
|
ω1 |
1 |
|
|
|
|
|
|
|
|
R0 |
|
d 2s2 |
|
|
|
|
|
|
|
|
R0 |
ds2 |
|
|
|
|
|
|
|
|
|
|
|
dϕ22 |
|
|
|
|
|
|
|
|
|
|
dϕ1 |
|
|
|
|
|
|
|
|
|
|
a φп/2 φп/2 |
|
φo/2 φo/2 |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φп=π |
|
|
|
|
|
|
–a |
|
|
φ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–a |
|
|
φо=π |
φ1 |
|
|
|
|
|
|
|
|
φп=π |
|
|
φо=π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К задаче 173 |
|
|
|
К задаче 174 |
175. Для несмещенного кулачкового механизма с поступательно движущимся толкателем определить величины углов давления для семи положений на фазе подъема. Известно, что полный ход толкателя h=42 мм; закон изменения первой производной от функции положения толка-
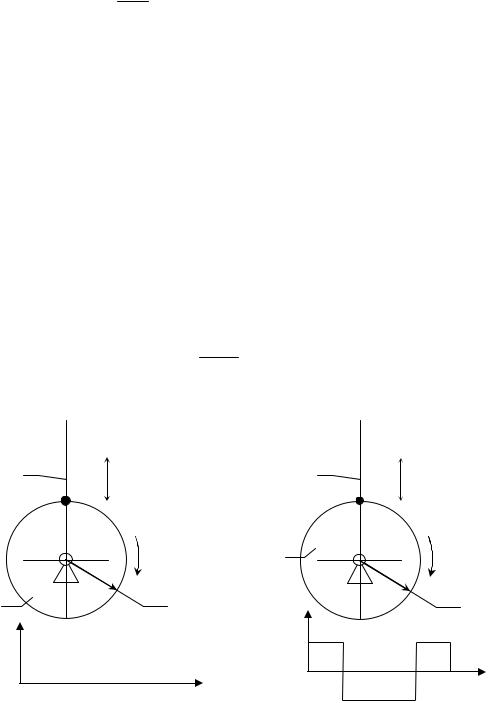
теля задан графиком ds2 = Φ(ϕ1 ), минимальный радиус кулачка R0=24 dϕ1
мм, фазовый угол подъема φп=π , фазовый угол опускания ϕо=π.
176. Для несмещенного кулачкового механизма с поступательно движущимся толкателем определить величины углов давления для семи положений на фазе подъема. Известно, что полный ход толкателя h=36 мм; закон изменения второй производной от функции положения толка-
теля задан графиком |
d 2 s2 |
= Φ(ϕ |
1 |
), минимальный радиус кулачка |
|
|
dϕ22 |
|
|
|
|
R0=20 мм, фазовый угол подъема φп=π , фазовый угол опускания ϕо=π. 177. Для кулачкового механизма с несмещенным поступательным
толкателем определить радиус кривизны профиля кулачка в месте его касания с толкателем, получаемое при повороте кулачка на угол 45° из положения, показанного на чертеже. Известно, что полный ход толкателя h=40 мм; закон изменения второй производной от функции положе-
ния толкателя задан графиком d 2 s2 = Φ(ϕ1 ), минимальный радиус ку-
dϕ22
лачка R0=40 мм, фазовый угол подъема φп=π.
|
|
C |
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
A |
|
|
ω1 |
1 |
A |
|
|
ω1 |
1 |
|
|
|
|
|
|
|
R0 |
|
d 2s2 |
|
|
|
|
|
|
|
R0 |
ds2 |
|
|
|
|
|
|
|
|
|
|
dϕ22 |
|
|
|
|
|
|
|
|
|
dϕ1 |
|
|
|
|
|
|
|
|
|
a φп/2 φп/2 |
|
φo/2 φo/2 |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φп=π |
|
|
|
|
|
|
–a |
|
|
φ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
–a |
|
|
φо=π |
φ1 |
|
|
|
|
|
|
|
φп=π |
|
|
φо=π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К задаче 175 |
|
|
|
К задачам 176–177 |
178. Для кулачкового механизма найти полярные координаты точки профиля кулачка, которая находится в месте касания кулачка с концом толкателя при повороте кулачка на угол ϕ1=30° из положения, указанного на чертеже, если полный ход толкателя h=40 мм; закон из-
менения второй производной от функции положения толкателя задан
графиком d 2 s2 = Φ(ϕ1 ), фазовый угол подъема φп=120°.
dϕ22
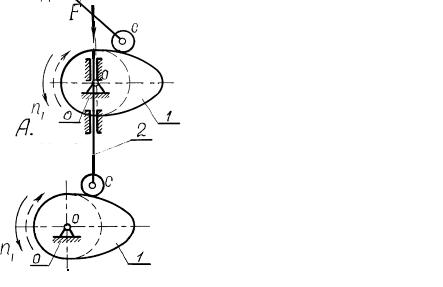
179. Для кулачкового механизма с коромысловым толкателем определить угол давления α в том положении механизма, которое получается в результате поворота кулачка на угол ϕ1=45°. Известно, что расстояние между осями вращения кулачка и толкателя L=120 мм; длина толкателя l=90 мм, начальный угол отклонения толкателя от линии центров AC ϕ0=30°, ход толкателя Фmax=30°, закон изменения первой про-
изводной от функции положения представлен графиком d 2 s2 = Φ(ϕ1 ),
dϕ22
фазовый угол подъема φп=0,5π.
|
|
|
B |
1 |
A |
|
|
ω1 |
d 2s2 |
|
|
|
R0 |
|
|
|
|
dϕ22 |
a |
φп/2 φп/2 |
|
φo/2 φo/2 |
|
|
|
|
|
|
|
|
–a |
|
|
φ1 |
|
|
φп=π |
|
|
φо=π |
|
|
|
|
|
|
К задаче 178 |
C
2 Φ ϕ0 L
 B
B
A ω1
1
R0
ds2
dϕ2 |
φп/2 φп/2 |
|
φo/2 φo/2 |
|
|
|
a |
|
|
|
–a |
|
φ1 |
|
φп=π |
|
φо=π |
|
|
К задачам 179–180
180. Для кулачкового механизма с коромысловым толкателем найти радиус-вектор точки профиля кулачка, которая находится в месте касания профиля кулачка с концом толкателя при повороте кулачка на угол ϕ1=60° из положения, указанного на чертеже, если начальный угол отклонения толкателя от линии центров АС равен ϕ0=30°, ход толкателя Ф=30°, расстояние между осями вращения кулачка и толкателя L=80 мм; длина толкателя l=60 мм, закон изменения первой производной от
функции положения представлен графиком d 2 s2 = Φ(ϕ1 ), фазовый угол
dϕ22
подъема φп=120°.
при подъеме γ пмин |
55 |
50 |
55 |
50 |
45 |
при опускании γ омин |
50 |
45 |
40 |
50 |
40 |
Полезный момент сопротивления М, Нм |
300 |
350 |
400 |
450 |
500 |
|
|
|
|
|
|
Частота вращения кулачка n, 1/мин |
100 |
90 |
80 |
70 |
60 |
|
|
|
|
|
|
Фазовые углы (градусы): |
|
|
|
|
|
подъема ϕ П |
180 |
180 |
150 |
120 |
120 |
верхнего выстоя ϕ ВВ |
90 |
60 |
90 |
90 |
90 |
опускания ϕ О |
90 |
90 |
100 |
120 |
90 |
Направление вращения кулачка |
|
|
|
|
|
(«+» по часовой стрелке |
+ |
– |
+ |
– |
+ |
«–» против часовой стрелки) |
|
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы
1.Перечислите типы плоских и пространственных зубчатых передач.
2.Сформулируйте и изложите основной закон зацепления (теория Виллиса).
3.Что такое основная окружность?
4.От чего зависят радиусы эвольвенты?
5.Что такое параметры зубчатого зацепления? Перечислите основные параметры.
6.Что такое радиусы начальной и делительной окружности? Чем они различаются?
7.По каким условиям определяется наименьшее число зубьев?
8.В чем заключается метод сдвига режущего инструмента и когда возникает необходимость им воспользоваться?
9.Какие основные размеры корригированного зубчатого колеса изменяются при нарезании со сдвигом режущего инструмента?
10.По каким условиям определяются наименьший и наибольший сдвиги режущего инструмента?
11.В каких случаях при нарезании применяется рейка, а в каких случаях необходимо применять долбяк?
12.Какое наименьшее число зубьев может быть нарезано рейкой без сдвига режущего инструмента?
13.Перечислите основные качественные показатели зубчатого зацепления.
14.Каковы особенности косозубых зубчатых колес, и какие достоинства имеет косозубое зацепление?