

pp_v_ses
.pdfМВт
4.Результаты расчета
На начальной стадии расчета программа осуществляет приближенное приведение исходных данных к базисным условиям при принятой величине базисной мощности и выводит на экран параметры эквивалентной схемы замещения в системе относительных единиц.
Вывод угловых характеристик энергосистемы
Таблица 2
Угол |
|
|
|
|
|
Код задания и мощность, МВт |
|
|
|
|
||||||
|
1 |
2 |
3 |
|
4 |
5 |
6 |
7 |
||||||||
град |
|
|
||||||||||||||
P1 |
|
P2 |
P1 |
P2 |
P1 |
|
P2 |
P1 |
P2 |
P1 |
P2 |
P1 |
P2 |
P1 |
P2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.Обработка результатов расчета
Вотчете по лабораторной работе следует привести схему электропередачи, схему замещения, исходные данные для расчета, результаты расчета, пункты задания по обработке результатов расчета.
5.1. По данным численных экспериментов (расчетов) построить угловые характеристики эквивалентного генератора в следующих сочетаниях:
-по экспериментам 1,2;
-по экспериментам 1,3,4;
-по экспериментам 1,5;
-по экспериментам 1,6 или 1,7 (по заданию преподавателя).
5.2.По результатам эксперимента 1 определить и показать на всех рисунках передаваемую мощность P1 0 в нормальном режиме энергосистемы, приняв коэффициент запаса статической -ус тойчивости K C T = 2 5 % .
31
5.3. По величине P1 0 из пункта 2 задания определить коэффициенты запаса статической устойчивости энергосистемы для экспериментов 2 …6 или 7.
5.4.Определить по графикам и показать на рисунках численные значения собственных мощностей P1 1 и P2 2 для экспериментов 4…6 или 7.
5.5.Определить по графикам численные значения максимума взаимной мощности P1m a x эквивалентного генератора для экспериментов 4…6 или 7.
5.6.Определить по графикам и показать на рисунках численные значения дополняющих углов a12 для экспериментов4…6 или 7.
6. Контрольные вопросы
6.1.По какому практическому критерию определяется статическая устойчивость одномашинной энергосистемы?
6.2.Почему уменьшается предел статической устойчивости одномашинной энергосистемы при подключении шунтирующего реактора?
6.3.Почему повышается предел статической устойчивости одномашинной энергосистемы при подключении конденсаторной батареи?
6.4.Почему в уточненной модели энергосистемы угловые характеристики P1 (d ) и P2 (d ) не совпадают?
6.5.Почему дополняющий угол a12 может принимать как положительные, так и отрицательные значения?
6.6.Почему дополняющие углы a11 и a22 не имеют отрицательных значений?
ЛИТЕРАТУРА
1. Веников В.А. Переходные электромеханические процессы в электрических системах. - М.:Высшая школа, 1985. – 536 с.
32
ЛАБОРАТОРНАЯ РАБОТА № 5
ПОСТРОЕНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК И ИССЛЕДОВАНИЕ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
1.Цель работы
Изучить особенности построения статических характеристик и расчета предельных по статической устойчивости режимов асинхронного электродвигателя.
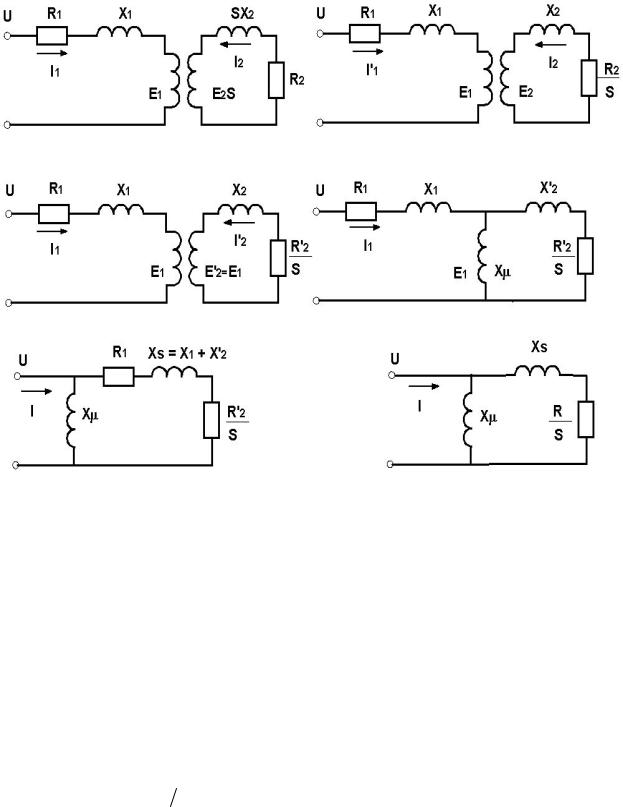
2.Схема замещения
Для построения статических характеристик асинхронного электродвигателя обычно используется Г-образная схема замещения, приведенная на рис.1,е. К этой схеме приводит ряд последовательных преобразований исходной двухконтурной схемы замещения(рис.1,а), из которой следует, что при установившихся значениях круговой частоты сети WC ,
частоте вращения ротора двигателя W Д и скольжении
s = |
WC -W Д |
|
(1) |
||
|
WC |
|
асинхронный электродвигатель представляет собой вращающийся трансформатор [1]. Первый и второй контуры трансформатора составляют индуктивно связанную статорную и роторную обмотки двигателя.
ЭДС s E во втором контуре наводится лишь при наличии скольжения, когда поле статора пересекает витки обмотки ротора, и имеет частоту s WC , пропорциональную скольжению. Соответственно, индуктивное сопротивление рассеяния s X 2 второго контура находится в прямой пропорциональной зависимости от скольжения. Сопротивления рассеяния X 1 и X 2 измерены при номинальной частоте.
Коэффициент трансформации E1 / s E2 определяется витковыми данными машины. В обмотках статора и ротора протекают токи I1, I 2 , соответственно, с частотами WC и s WC .
33
а |
|
б |
|
|
|
в |
|
г |
|
|
|
|
|
|
|
д |
|
|
е |
|
|
|
|
Рис.1. Схема замещения асинхронного электродвигателя |
||
|
|
|
|||
|
При |
упрощении исходной схемы замещения выполняются сле- |
|||
дующие операции: |
|||||
- ЭДС |
s E2 и сопротивления s X 2 ,R2 делят на скольжение (рис.1,б), |
||||
в результате чего ток I 2 остается неизменным;
-исходя из условий сохранения режима статора, параметры второго контура преобразуют так, что количество витков обмоток статора и ротора становятся численно одинаковыми. Соответственно, равны-
ми становятся ЭДС E'2 = E1 , индуктивно связанных элементов (рис. 1,в). При этом сопротивления второго контура приобретают новые значения R' 2 s и X '2 ;
-взаимно индуктирующие элементы замещают электрической связью
ссопротивлением намагничивания X m (рис.1,г);
34
- сопротивление X m выносят |
на вход первого контура и получают |
|
суммарное |
сопротивление |
рассеяния машины X S = X 1 + X '2 |
(рис.1,д). |
|
|
Получаемая в результате последней некорректной операции - по грешность незначительна, так как сопротивление намагничивания в десятки раз превышает активное и реактивное сопротивления первого контура. При расчетах устойчивости сопротивлением R1 обычно пренебрегают, используя упрощенную схему замещения, показанную на рис. 1,е.
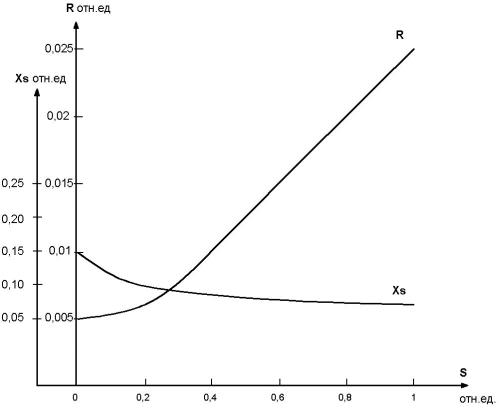
Рис.2. Зависимости активного и индуктивного сопротивлений от
скольжения
35

Рис.3. Кусочно-линейные зависимости R(s), X s (s)
Известно [1,2], что сопротивления X s и R схемы замещения зависят от режима работы электродвигателя. При увеличении s WC усиливается эффект вытеснения тока из проводников ротора, что приводит к возрастанию активного сопротивления. Индуктивное сопротивление рассеяния, напротив, убывает вследствие вытеснения магнитного потока рассеяния в воздушный зазор между ротором и статором и соответствующего уменьшения индуктивности рассеяния роторной обмотки.
Как видно из рис.2, зависимости R(s) и X s (s) весьма сущест-
венны и при больших скольжениях их следует учитывать. Для упрощения расчетов производится кусочно-линейная аппроксимация этих зависимостей. При простейшей аппроксимации (рис.3) можно принимать [1]:
ìR |
|
|
|
|
|
|
|
при |
s £ s ; |
|
|
ï |
|
0 |
( s |
|
- s ) + R |
|
( s - s ) |
|
1 |
(2) |
|
R = í R |
0 |
2 |
S1 |
|
|
|
|||||
ï |
|
|
|
1 |
|
при |
s > s1; |
|
|||
|
|
|
|
1 - s1 |
|
|
|
|
|||
î |
|
|
|
|
|
|
|
|
|
|
|
36
ì |
|
|
|
|
|
|
|
|
при |
s £ s1; |
|
ïX S 0 |
( s |
|
- s ) + X |
|
( s - s ) |
|
|||||
ï X |
S 0 |
2 |
S1 |
|
|
|
|||||
X S = í |
|
|
|
1 |
|
при |
s1 < s < s2 ; |
(3) |
|||
|
|
|
|
s2 - s1 |
|
|
|
||||
ï |
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
при |
s ³ s2 . |
|
îX S1 |
|
|
|
|
|
|
|
||||
Опорные значения скольжения |
s1 и s2 , соответствующие точкам |
||||||||||
излома кусочно-линейных зависимостей (рис.3), можно принимать из равенств:
s1 = s К Р ; s2 = 0,5 . . . 0,9 ,
где s К Р = R0 X S 0 - критическое |
скольжение электродвигателя при |
номинальной частоте в системе. |
|
Численные значения параметров |
R0 ,R1, X S 0 , X S1 и сопротивление |
намагничивания X m в собственных относительных единицах (при но-
минальных базисных условиях) определяются по каталожным данным электродвигателей с помощью следующих выражений [1]:
X S 0 |
= |
1 |
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
(4) |
||||
|
|
2mma x c o sjн о м |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
X m = |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
; |
(5) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
- 1 |
- 4X S20 c o s 2 jн о м |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
s i njн о м - |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
2 X S 0 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X S1 |
= |
|
|
|
X m |
|
|
; |
|
|
|
|
|
|
|
|
|
(6) |
|||
|
|
I П* X m - |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
S н о м |
|
|
|
|
|
|
|
|
|
|
|
) |
|
(7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
||||
R0 = |
|
|
|
|
|
1 |
+ 1 |
- |
4 X S 0 c o s |
|
jн о м |
; |
|
||||||||
2c o sjн о м |
|
|
|
||||||||||||||||||
|
|
( |
|
|
|
|
|
|
|
|
|
|
|||||||||
37

R = |
1 - 1 - 4X S21mП2 c o s 2 jн о м |
, |
(8) |
|
|
||
1 |
2mП c o sjн о м |
|
|
|
|
|
где sн о м - номинальное напряжение;
c o sjн о м - номинальный коэффициент мощности;
mП = М П  М н о м - кратность пускового момента;
М н о м - кратность пускового момента;
mm a x = М m a x |
М н о м - кратность максимального момента; |
|
I П* = I П I н ом |
- кратность пускового тока (пусковой ток в собст- |
|
венных относительных единицах). |
|
|
В качестве базисных величин мощности и напряжения в собствен- |
||
ной системе относительных единиц принимаетсяS б = S н о м |
и |
|
U б =U н о м электродвигателя. |
|
|
3.Статические характеристики
Под статическими характеристиками понимаются графически или аналитически представленные связи каких-либо параметров режима с другими его параметрами и параметрами системы. Эти связи выявляются при достаточно медленных изменениях режима, позволяющих считать их не зависящими от времени [3].
Для элементарных и комплексных нагрузок наибольшее применение в расчетах находят статические характеристики активной и реактивной мощностей по частоте и напряжению. При этом, как правило, статические характеристики определяют:
P(U ) , Q(U ) |
п ри f = c o n s t; |
P( f ) , Q( f ) |
п р и U = c o n s t, |
где f = WC / 2p - |
частота в сети; |
U - напряжение узла подключения нагрузки.
По статическим характеристикам асинхронного электродвигателя определяющее влияние оказывают момент сопротивления приводимого
в движение механизма (механический момент M ме х (W Д ) ) и зависи-
мости индуктивных сопротивлений от частоты. При учете только основных моментов, действующих на вал электродвигателя, его устано-
38
вившийся режим будет характеризоваться равенством электромагнитного (ускоряющего) и механического (тормозящего) моментов:
(9)
Mэ м (U ,WC ,s) = M мех (W Д ).
Всоответствии с принятой Г-схемой замещения(Рис.1,в) электромагнитный момент двигателя в собственных относительных единицах имеет вид:
|
P |
U 2 R s |
|
|
M эм = |
эм* |
= |
* |
. |
|
WC* (WC*2 X S2 s 2 + R 2 ) |
|||
|
WC* |
(10) |
||
Величина момента сопротивления определяется выражением:
M м ех = kЗ Q(W Д* )co sjн о м , |
(11) |
где k З - коэффициент загрузки;
Q(W Д* ) - функция, определяющая вид моментно-скоростной ха-
рактеристики приводимого механизма.
Коэффициент загрузки определяется при номинальных значениях частоты и напряжения как отношение потребляемой P0 к номинальной Pно м активной мощности электродвигателя:
k З = P0  Pн о м .
Pн о м .
Моментно-скоростные характеристики реальных механизмов представляют собой сложнее зависимости, однако часто их аппроксимируют с помощью двучлена вида [1]:
ì |
W Д* |
üP |
|
|
ï |
ï |
|
(12) |
|
Q(W Д* ) = mС Т + (1 - mС Т )í |
|
ý |
, |
|
|
||||
ïW Д н о м* ï |
|
|
||
î |
|
þ |
|
|
где mС Т = Q(0) - статический момент сопротивления;
p - некоторый коэффициент- показатель степени нелинейной части моментно-скоростной характеристики.
Ориентировочно для шаровых мельниц, дробилок, поршневых компрессоров, металлорежущих станков mС Т »1, p » 0 ;
39

для воздуходувок mС Т »1, p » 2 ; |
|
для центробежных насосов mС Т » 0,3 . . . 0,7 , |
p » 2 . |
Из (1) следует |
|
W Д = WC (1 - s ); |
(13) |
W Д* = W Д WC н о м = WC* (1 - s). |
|
Номинальное скольжение определяется при номинальной частоте в сети, поэтому
W Д н ом = WC н о м (1 - sн ом );
(14)
W Д н о м* = W Д н о м WC н о м = 1 - sн о м .
С учетом этих замечаний выражение момента сопротивления приводимого механизма (11) приобретает вид:
|
|
|
|
|
|
|
|
é |
|
|
|
|
|
|
|
|
|
|
P |
æ |
|
1 - s ö |
P |
ù |
|
|
|
|
|
|
|
|
(15) |
|||
|
M |
|
|
= k |
|
êm |
|
|
|
+ (1 - m |
|
)W |
|
|
ú co sj |
|
|
. |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
ç |
|
|
|
|
÷ |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
- s |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
м ех* |
|
|
|
З |
ê |
|
С Т |
|
|
|
|
С Т |
|
C* |
è1 |
н о м ø |
|
ú |
|
|
|
н ом |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
|
|
|
|
|
Соответственно, из (9,10,15) следует: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
U |
|
2 R s |
|
|
|
|
|
|
|
|
é |
|
|
|
|
|
|
|
|
|
|
æ |
|
|
1 - s |
öP ù |
(16) |
|||||||
|
|
|
* |
|
|
|
|
|
|
|
= WC* kЗ |
êmCT + (1 - mC T )WC*P |
ç |
|
|
|
|
÷ |
úc o sjн о м ; |
|||||||||||||||||
W |
2 X |
|
|
|
+ |
R 2 |
|
1 |
|
|
||||||||||||||||||||||||||
|
2s 2 |
|
|
|
|
|
|
ê |
|
|
|
|
|
|
|
|
|
|
è |
- sн о м ø |
ú |
|
||||||||||||||
|
C* |
S |
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
||||
|
Pэ м* = |
|
|
|
U*2 R s |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
X S2 s 2 |
+ R 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(17) |
|||||||||||
|
|
|
|
WC*2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
é |
|
|
|
|
|
|
)W P |
æ |
|
1 - s |
|
ö |
P |
ù |
|
|
|
|
|
|
|||||
|
P |
|
= W |
|
|
k |
|
|
êm |
|
+ (1 - m |
|
|
|
|
|
úc o sj |
|
|
|
. |
|
||||||||||||||
|
|
|
|
|
|
|
|
ç |
|
|
|
|
÷ |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
- sн о м |
|
|
|
|
|
|
|||||||||||||||||||||
|
м е х* |
|
|
|
C* |
|
З |
|
ê |
С Т |
|
|
|
|
С Т |
|
C* |
è1 |
ø |
|
|
ú |
|
н о м |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(18) |
где Pэ м* , Pм е х* - соответственно, электромагнитная мощность и мощ- |
||||||||||||||||||||||||||||||||||||
ность |
|
приводимого механизма, |
выраженные |
|
|
в |
собственных |
относи- |
||||||||||||||||||||||||||||
тельных единицах. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
40