

2.2. Интегральный регулятор
В системах автоматизированного электропривода И-регуляторы используются в том случае, когда необходимо исключить статическую или другие ошибки. При применении одного И-регулятора статическая ошибка стремится к нулю, при двух – к нулю сводится еще и ошибка по скорости и т.д.
Схема интегрального регулятора приведена на рис. 2.3. В данной схеме Z1(S) = R1, Z2(S) = 1/C·S, а S является оператором Лапласса. Передаточная функция
W(S) = K/S, (2.2)
где K=1/C·R – коэффициент передачи интегрирующего регулятора.

Исходя из формулы (2.2), И-регулятор можно считать как бы состоящим из двух последовательно включенных типовых звеньев: без инерционного и интегрирующего. Логарифмическая амплитудно-частотная характеристика отображается как:
L(ω) = 20ℓgA(ω) = 20ℓgK/ω = 20ℓgK - 20ℓgω, (2.3)
а логарифмическая фазочастотная характеристика ЛФЧХ как:
Y(ω) = -π/2 . (2.4)
На рис. 2.4 приведена логарифмическая амплитудно-частотная характеристика И- регулятора. Расчет данного регулятора по известной ЛАХЧ заключается в определении величины коэффициента передачи К. В формуле (2.3) L(ω) зависит от К и ω. Если определить L(ω) при частоте ω=1, то формула изменит вид на L(ω) = 20ℓgК. Решая это уравнение относительно К, мы получим необходимое численное значение.
Фазочастотая характеристика имеет постоянный сдвиг на угол - , что приводит к снижению устойчивости работы систем автоматического регулирования с И-регуляторами.
Значение К зависит от двух параметров R и С, поэтому при расчете коэффициента усиления одной из величин задаются исходя из удобства практической реализации, а вторая рассчитывается. Использование И- регулятора снижает ошибку регулирования до нуля. Это происходит за счет того, что при наличии сигнала на входе И-регулятора он изменяет свой выходной сигнал с определенной скоростью. На один вход поступает сигнал задающий, а на второй – сигнал обратной связи. Их разность определяет величину ошибки. Когда оба сигнала сравняются по величине, их разность станет нулевой и изменение выхода регулятора прекратится. Равенство Uзад = Uвых = Uосс, говорит о том, что ошибка U = Uзад- Uосс будет нулевая. В качестве понятия практической реализации используется требование, чтобы входное сопротивление регулятора было на порядок выше выходного сопротивления устройства, с которого поступает сигнал в виде напряжения, а значение параметра соответствовало бы стандартному.
2.3. Дифференцирующий регулятор
Д-регулятор используется в тех случаях, когда необходимо повысить устойчивость или быстродействие автоматической системы. Схема регулятора приведена на рис. 2.5. Данная схема соответствует реальному Д-регулятору и в ней Z1(S) = R1+1/CS, Z2(S) = R2.
Передаточная функция:
W(S) = R2/(R1+ 1/С· S) = К·S/(1+ T·S), (2.5)
где K=C·R2 – коэффициент передачи, T=C·R1 – постоянная времени регулятора.
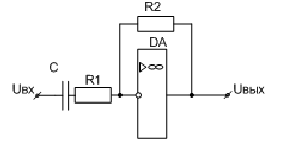 Рис.
2.5. Схема реального Д-регулятора
Рис.
2.5. Схема реального Д-регулятора
Исходя из формулы (2.5), реальный Д-регулятор можно представить как три последовательно соединенных типовых звена: безинерционное, апериодическое и дифференцирующее. Вид его ЛАЧХ показан на рис. 2.6.
Для нормального функционирования регулятора необходимо выполнить условие, чтобы частота среза ωc < 1/T. Данное условие будет выполнено, если R2/R1> 10 √2.
В этом случае регулятор, как дифференцирующий, будет функционировать в области частот от 0 до1/Т .
Расчет регулятора заключается в решении уравнений:
K = C·R2, T = C·R1, R2 = 10√2R1