

Xm Series
4-канальные усилители мощности великолепно работают в составе аудиосистемы.
 TXn
Series
TXn
Series![]()
Интеллектуальные транспортируемые усилители, готовые для подключения в сеть, со встроенным модулем цифровой обработки сигнала и возможностью гибкой настройки портов ввода/вывода.
 Серия
P
Серия
P![]() Соединяет
в себе гибкость входов и выходов,
обработку сигнала на выходе и усилители
мощности в одном устройстве, обладая
при этом высокими характеристиками и
экономичностью.
Соединяет
в себе гибкость входов и выходов,
обработку сигнала на выходе и усилители
мощности в одном устройстве, обладая
при этом высокими характеристиками и
экономичностью.

Серия
XP![]()
Эти усилители мощности с регулируемой входной чувствительностью и стабильным напряжением идеальны для использования со встроенными акустическими системами.
 XH200
XH200![]()
Этот усилитель обеспечивает выходную мощность 200 Вт на каждом из двух каналов и совместим с линиями 100 и 70 В.
Ipa8200
Высокоэффективный усилитель класса D мощностью 200 Вт на каждом канале и в компактном корпусе высотой 2U.
15. Примеры использования различных регуляторов на базе операционных усилителей в автоматизированных системах управления.
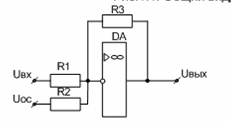
Типовой регулятор отличается от типового звена наличием двух и более входов. К ним относятся вход, на который поступает задающий сигнал, и вход для сигнала обратной связи
Пропорциональный (безинерционный), или П-регулятор является наиболее простым как по схемной реализации, так и по математическому описанию. Он не искажает форму задающего сигнала. Его применение приводит к снижению статической ошибки в замкнутой системе регулирования.
К недостаткам использования П-регуляторов можно отнести наличие всех видов ошибок управления, а также снижение устойчивости системы регулирования при увеличении коэффициента передачи регулятора К. На рис. 2.1 приведена его реализация с помощью операционного усилителя, которая чаще всего используется в системах автоматизированного электропривода, где Z1(S)= R1, Z2(S) = R3. Тогда передаточная функция
W(S) = R3 / R1 = K. (2.1)
Выражение (2.1) называется передаточной функцией по задающему воздействию. Если требуется исследовать регулятор по второму входу, то в выражении (2.1) вместо R1 необходимо подставить R2. Получим передаточную функцию по цепи обратной связи.
Расчет регулятора заключается в определении необходимого коэффициента усиления К. Если необходимо рассчитать регулятор, используя логарифмические частотные характеристики, то это сделать для данного звена довольно просто. Необходимо определить значения ЛАЧХ при любой частоте и разделить на 20. Над полученным значением провести преобразование, обратное логарифмированию. Полученная величина и есть коэффициент усиления. Реализация регулятора заключается в определении R4 = K · R2. Величину R2 можно взять любую, с условием обеспечения реализуемости схемы, которая для серии операционных усилителей типа К140 заключается в выполнении требования, чтобы величины сопротивлений, используемых в схемах, были больше 2 КОм и меньше 0.5 МОм. Лучшие результаты получаются, когда сопротивления находятся в пределах 5.100 КОм. Нижние приделы используются в микромощных схемах, верхние в слаботочных устройствах.