


Резонанс может быть не только при совпадении частот ωIII = К - резонанс первого порядка, но и при частот 2ωIII = К – резонанс второго порядка, 3ωIII = К – резонанс третьего порядка. Для нормальной работы машинного агрегата отношение частот должно быть:
или ωKIII £ 0,7 - дорезонансный режим
или ωKIII ³ 1,4 - зарезонансный режим.
Если машинный агрегат работает в резонансной зоне 0,7 £ ωKIII £ 1,4 , то из нее следует выходить изменяя конструктивные параметры. При выходе
в дорезонансный режим отношение |
ω III |
¯ < 0,7 следует уменьшать, т.е. |
||||
K |
||||||
|
|
|
|
|
||
увеличивать собственную частоту - |
К−, |
так как |
K = |
c22 |
, то для |
|
|
|
|
|
a22 |
||
увеличения К следует либо увеличить жесткость муфты с22− либо уменьшать приведенный момент инерции машинного агрегата а22↓.
При выходе в зарезонансный режим следует ωKIII - > 1,4 , т.е. уменьшить К↓, что достигается уменьшением с22↓ или увеличением а22−.
10 Уравновешивание и виброзащита машин
10.1 Уравновешивание машин
При движении механизма на его звенья действуют силы инерции, которые считаются приложенными в центрах тяжести Fин.i = - mi aSi . Поскольку ускорение центра тяжести звена aSi может быть переменно и по величине, и по направлению, то силы инерции звеньев в механизме также переменны и их проекции на оси координат представляют собой сложные периодически функции, имеющие период, равный времени одного оборота ведущего звена (кривошипа).
Неуравновешенные в механизме силы инерции передаются на раму и фундамент машины, вызывая вибрацию самой машины и стоящих рядом машин.
Задача об уравновешивании сил инерции звеньев может быть разделена на две самостоятельные задачи:
а) задача об уравновешивании динамических нагрузок в кинематических парах (уравновешивание вращающихся звеньев);
б) задача об уравновешивании динамических нагрузок на раму и фундамент машины (уравновешивание маханизмов циклического действия, например, рычажных механизмов).
10.1.1 Уравновешивание вращающихся звеньев
Необходимость уравновешивания быстро вращающихся звеньев можно пояснить числовым примером. Пусть звено массой m = 10 кг, вращается с постоянной угловой скоростью ω = 1000 рад/c (рисунок 10.1). Расстояние центра масс от оси вращения rs = 0,001 м.
Сила инерции
Fин = maS = mw 2rs = 10 × 10002 × 0,001 = 10000, Н. Сила веса
FG = mg = 10 × 10 = 100 , Н.
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
F УР |
|
О |
|
m УР |
|
|
r |
Z |
|
|
|
|
УР |
||||
Y |
|
m |
S |
М |
r S |
||
|
|
|
ИН |
|
|||
|
FУР |
|
|
|
FУР |
|
|
|
|
|
|
|
ИН |
|
|
Х Оунок 10.1 |
|
|
|
|
|
r УР |
Z |
|
|
|
|
|
|
||
|
r |
|
|
|
|
|
|
|
S |
S |
|
|
|
|
|
|
m |
|
|
FУР |
|
||
|
FИН |
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
l |
l 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М УР |
|
|

Рисунок 10.2
т.е. сила инерции в 100 раз больше силы веса и к тому же имеет переменные направления, что может вызвать нежелательные колебания звеньев.
Для полного уравновешивания вращающего звена необходимо, чтобы главный вектор Fин и главный момент сил инерции Мин были равны нулю.
1) |
|
ин = 0 , |
2) |
|
ин = 0 . |
F |
М |
Иногда ограничиваются выполнением только первого условия, которое равносильно условию расположения центра масс на геометрической оси вращения звена. Такое уравновешивание вращающего звена называется статическим. Оно применимо для звеньев, имеющих малую протяженность вдоль оси вращения (шкивы, маховик и т.п.).
Для статического уравновешивания надо в направлении, противоположном центру масс установить добавочную
(уравновешивающую) массу – mур на расстоянии rур от оси вращения, таким образом, чтобы сила инерции уравновешивающего груза была равна, но противоположно направлена силе инерции неуравновешенного звена
Fур = mурω 2rур = Fин = mω 2rs ,
или
mурrур = mrs .
Результирующая сила инерции при этом условии будет равна нулю.
За меру статической неуравновешенности или статического дисбаланса принимают величину статического момента массы звена относительно оси вращения
= mrs .
Статическую неуравновешенность можно обнаружить статическим испытанием. С этой целью звено цилиндрической формы устанавливают на

горизонтальные призмы. Если центр масс расположен на оси цилиндра, то звено будет находиться в равновесии при любом положении. Если нет, то после непродолжительных колебаний звено займет устойчивое положение, при котором центр масс имеет низшее расположение. В этом положении методом проб сверху устанавливают уравновешивающий груз или снизу высверливают массу mур, добиваясь безразличного положения равновесия звена.
Для широкого барабана выполним то же самое условие, но уравновешивающую массу разместим на расстоянии от центра масс S (рисунок 10.2)
mrs = mур × rур .
Статически барабан уравновешен. Но при вращении барабана появляется момент от пары сил инерций, Нм
Мин = Fин × l,,
который так же вызывает биения вала. Для динамической балансировки необходимо, чтобы выполнялось второе условие
Мин = 0 .
Для чего нужно в плоскости действия момента пары сил инерции Мин двумя новым уравновешивающими грузами m1ур создать равный по
величине, но противоположно направленный уравновешивающий момент, Нм
Мур = Fур1 l1 .
Например: с валом, вращающимся в подшипниках жестко связаны массы m1, m2, m3, которые вращаются в разных плоскостях и расположены под разными углами наклона и горизонту α 1 ,α 2 , α 3 (рисунок 10.3).
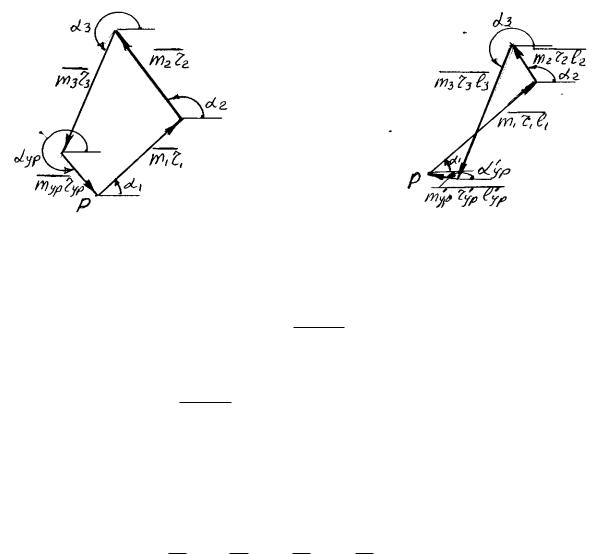
Рисунок 10.3
Величины центробежных сил инерции, развиваемых этими массами равны
F = m |
1 |
ω2r = m |
1 |
a |
S |
|
, F = m |
2 |
ω2r |
2 |
= m |
2 |
a |
S |
|
, F = m |
3 |
ω2r |
3 |
= m |
3 |
a |
S |
|
. |
|||||||||||||||
ин |
|
1 |
|
1 |
|
|
ин |
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
ин |
3 |
|
|
|
3 |
|
|||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Для статического уравновешивания должно выполняться условие |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ин |
+ |
|
ин |
|
+ |
|
ин |
+ |
|
ур = 0 , |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
F |
F |
|
F |
F |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
где |
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× w 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
F |
= |
m |
ур |
× r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ур |
|
|
|
|
ур |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Подставляя значения Fин i в векторное уравнение (без w 2 ) имеем:
m1r2 + m2 r2 + m3 r3 + mурrур = 0 .
Это векторное уравнение решаем графически строя план сил в масштабном коэффициенте μ mr кгм/мм (рисунок 10.4).
Рисунок 10.4 |
Рисунок 10.5 |
Из плана находим величину и направление
mурrур = mурrурm mr.
Уравновешивающая масса mур может быть установлена в любой точке по длине вала и на любом расстоянии rур от его оси вращения, отложенном в
направлении вектора mурrур , (под углом α ур ). Место крепления mур
называется плоскостью коррекции.
Для уравновешивания динамических нагрузок от момента сил инерции находим моменты относительно точки крепления mур (плоскости коррекции)
М |
ин |
|
= m |
ω2r l |
, M |
ин |
|
= m |
ω2r |
l |
, |
M |
ин |
|
= m |
ω2r |
l |
. |
|
1 |
1 |
1 1 |
|
2 |
2 |
2 |
2 |
|
|
3 |
3 |
3 |
3 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для динамического уравновешивания должно выполняться условие
Мин1 + Мин2 + Мин3 + Мур = 0 ,
где
Мур = mур/ w 2rур/ lур/ .