

|
|
|
|
δ A = |
|
M Д δ ϕ 1 + |
|
Mψ δ (ϕ 2 − ϕ 1 ) − |
|
MC.I δ ϕ 2 = |
|
|
|
|
|
|
(9.31) |
|||||||||||||||||||||||||
|
|
|
|
|
|
= |
M Д d q1 + |
Mψ d q2 - |
MC.I d (q1 + q2 ). |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
Уравнение работ в общем виде для системы с Н=2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ A = |
Q1δ q1 + Q2δ q2 . |
|
|
|
|
|
|
|
|
|
|
(9.32) |
||||||||||||||||
Приравнивая в выражениях (9.31) и (9.32) коэффициенты при |
δ q1 и |
|||||||||||||||||||||||||||||||||||||||||
δ q2 , находим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ü |
|
|
||
|
|
Q1 = |
|
M Д |
- |
MC.I |
= |
M Д |
- |
M0i31 - |
|
Mi31 sin w III t, |
|
|
||||||||||||||||||||||||||||
|
|
|
|
ï |
|
(9.33) |
||||||||||||||||||||||||||||||||||||
|
|
Q |
|
= |
|
M |
|
|
- |
M |
|
|
= |
- bq |
|
- |
M |
|
i |
|
|
|
|
~ |
|
|
sin w |
|
|
t |
ý |
|
||||||||||
|
|
2 |
|
ψ |
|
C.I |
2 |
0 |
31 |
- Mi |
31 |
III |
ï |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
þ |
|
|
||||||||||||||
где Mψ = |
− bq2 ; |
b = |
|
|
cψ |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
2p w III |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Математическая модель (9.24) с учетом (9.27), (9.30), и (9.33) примет |
||||||||||||||||||||||||||||||||||||||||||
вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ü |
|
|
a11q1 + |
a12q2 = |
M Д |
- |
M0i31 |
- |
Mi31 sin w III t, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
ï |
(9.34) |
|||||||||||||||||||||||||||||||||||
a |
|
q |
|
+ |
a |
|
|
q |
|
+ |
bq |
|
+ |
c |
|
q |
|
= |
- M |
|
|
i |
|
|
~ |
|
|
|
sin w |
|
|
|
|
ý |
||||||||
21 |
1 |
22 |
2 |
2 |
22 |
2 |
0 |
31 |
- Mi |
31 |
III |
tï |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
þ |
|
|||||||||||||||||
9.4 Решение уравнений движения
В полученной математической модели (9.34) координата q1 описывает абсолютное вращение ведущего вала без колебательного процесса, т.е. является циклической. При большой мощности электродвигателя можно принять, что ведущий вал вращается равномерно. Тогда φ1 есть известная функция времени,
|
|
|
|
|
|
|
ϕ 1 |
= |
q1 |
= |
ω I t, |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
j 1 |
= |
q1 |
= w I = const, |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
j 1 |
= |
q1 |
= |
0. |
|
|
|
|
|
|
|
|
|
|
Тогда математическая модель (9.34) примет вид |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
ü |
|
a12q2 = |
M Д - M0i31 |
- |
Mi31 sin w III t, |
|
|
|
|||||||||||||||
|
|
ï |
(9.35) |
||||||||||||||||||
a |
|
q |
|
+ |
bq |
|
+ c |
|
q |
|
= |
- M |
|
i |
|
~ |
|
sin w |
|
ý |
|
22 |
2 |
2 |
22 |
2 |
0 |
31 |
- Mi |
31 |
III |
t.ï |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
þ |
|
|||||||||
В математической |
модели |
(9.35) для |
решения |
остается |
второе |
||||||||||||||||
уравнение системы, из которого находится неизвестная позиционная координата q2 = φ2 – φ1, которая и описывает колебания ведомой массы.
Первое уравнение системы (9.35) используется для определения – МД. Второе уравнение системы представляет собой дифференциальное неоднородное уравнение второго порядка, с постоянными коэффициентами.
a22q2 + |
bq2 + c22q2 = - M0i31 - Mi31 sin w III t . |
(9.36) |
|
|
|

Постоянная составляющая момента сопротивления |
− M0i31 вызывает |
||
статическую деформацию упругой связи |
|
||
q2ст = − |
M0i31 |
, рад . |
(9.37) |
|
|||
|
c22 |
|
|
Постоянная составляющая не изменяет характера колебательного движения. Необходимо лишь за нулевое значение угла закручивания принять величину статической деформации (9.37). Тогда полное решение уравнения (9.36) будет
|
|
M0i31 |
q2 = q2ст + q*2 + q*2* , |
(9.38) |
где |
q2ст = − |
- статическая деформация; |
|
|
|
|
|||
|
|
c22 |
|
|
q*2 - общее решение однородного уравнения, характеризующее собственные колебания системы;
q*2* - частное решение неоднородного уравнения,
характеризующее вынужденные колебания системы. Однородное уравнение имеет вид
или |
|
|
|
|
a22q2 + |
|
bq |
2 + |
c22q2 = |
0 , |
(9.39) |
||||||||||
|
|
|
|
|
|
|
|
b |
|
|
|
|
c22 |
|
|
|
|
|
|
||
|
|
|
|
q2 + |
|
|
|
q2 |
+ |
|
|
q2 = |
0 . |
|
|||||||
|
|
|
|
|
|
|
|
|
a22 |
|
|
||||||||||
Обозначим |
|
|
|
|
|
|
|
a22 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
= |
2n; |
|
c22 |
|
= |
K |
2 |
. |
|
|||||
|
|
|
|
|
|
a22 |
|
a22 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Уравнение (9.39) примет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
q |
2 + |
2nq |
2 + |
K 2q2 = |
0. |
|
(9.40) |
|||||||||||
Решение уравнения (9.40) имеет вид |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
q*2 = A*e− nt sin(K*t + |
α ), |
(9.41) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где |
A* = |
C12 + |
C22 |
|
|
- |
|
начальное |
|
отклонение |
(амплитуда |
||||||||||
собственных колебаний); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
α |
= arctg |
C2 |
- начальная фаза; |
|
|
|
|
|
|
||||||||||||
C1 |
|
|
|
|
|
|
|
||||||||||||||

C1 = |
q0 + nq0 |
|
- начальная скорость; |
|
||||
|
K* |
|
||||||
|
|
|
|
|
|
|
||
C2 = |
q0 - начальное смещение; |
|
||||||
K* = |
|
K 2 - n2 |
- частота собственных колебаний, 1/с. |
|
||||
так как в реальных механических системах n << K, то |
|
|||||||
|
|
|
K* » |
K = |
c22 |
. |
(9.42) |
|
|
|
|
|
|||||
|
|
|
|
|
|
a22 |
|
|
Решение (9.41) показывает, |
что |
движение представляет |
собой |
|||||
затухающие колебания, о чем |
свидетельствует показатель степени |
e-nt, с |
||||||
постоянно убывающей амплитудой – А* и постоянной частотой К*, 1/с. Амплитуда и начальная фаза колебаний зависят от начальных условий
С1 и С2, а частота колебаний К* - не зависит от них, а зависит только от собственных параметров системы (9.42).
По этому признаку эта частота называется собственной частотой системы.
Поскольку с течением времени собственные колебания затухают, то из общего решения однородного уравнения (9.41) определяется частота собственных колебаний (9.42).
Неоднородное уравнение (9.36) после преобразований будет
|
|
q2 |
+ |
2nq2 + |
K |
2q2 = |
M × i31 |
sin w III t , |
(9.43) |
||||||||
|
|
|
|||||||||||||||
|
b |
|
|
|
|
c |
|
|
|
|
|
|
|
a22 |
|
||
где 2n = |
; |
K |
2 |
= |
22 |
|
. |
|
|
|
|
|
|
|
|||
a22 |
|
a |
22 |
|
|
M0 × i31 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
(постоянная составляющая - |
использована для |
определения |
|||||||||||||||
статической деформации – q2ст (9.37). |
|
|
|
|
|||||||||||||
Частное решение уравнения (9.43) имеет вид |
|
||||||||||||||||
|
|
|
|
|
|
q*2* = |
A** × sin(w III t + a ) , |
(9.44) |
|||||||||
где |
|
a |
= |
arctg |
|
|
2nω III |
|
- |
начальная фаза |
вынужденных |
||||||
|
|
K 2 |
- w III2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
колебаний (в установившемся режиме работы машинного агрегата роли не играет);
А** - амплитуда вынужденных колебаний, рад.
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M × i31 |
|
|
|
|
|
|
||||
A** = |
|
|
|
|
c22 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
ö |
2 |
|
|
2 . |
(9.45) |
|||||||
æ |
|
|
y |
||||||||||||
ç |
1 - |
w III |
÷ |
+ |
|
|
|
|
|
||||||
ç |
|
|
K |
2 |
÷ |
|
|
4p |
2 |
|
|
|
|
||
è |
|
|
|
ø |
|
|
|
|
|
|
|
||||

Решение (9.44) показывает, что движение представляет собой незатухающие колебания с вынужденной частотой – ωIII и амплитудой А**.
Величина амплитуды А**, зависит от |
отношения частот ω III |
K и при |
||||||||
совпадении их (ωIII = К) |
|
M × i31 × 2p |
|
|
|
|||||
A**max = |
. |
|
(9.46) |
|||||||
|
|
|||||||||
|
|
|
c22 × y |
|
||||||
Таким образом, полное решение (9.38) без учета собственных |
||||||||||
затухающих колебаний, будет |
|
M0 × i31 |
|
|
||||||
q2 = q2ст + q**2 |
= - |
+ A** sin w III t . |
(9.47) |
|||||||
|
||||||||||
|
|
|
|
|
|
c22 |
|
|||
Дважды дифференцируем полученное решение |
|
|||||||||
q2 |
= w III A** cos w III t , |
(9.48) |
||||||||
q2 |
= - w III2 |
A** sin w III t . |
(9.49) |
|||||||
Подставляя (9.49) в первое уравнение системы (9.35) находим |
||||||||||
необходимый движущий момент |
|
|
|
|
|
|
|
|||
M дв = M0i31 + Mi31 sin w III t + a12q2 = |
(9.50) |
|||||||||
= M0i31 + |
~ |
|
- A |
** |
2 |
|
|
|||
(Mi31 |
|
w III )sin w III t. |
|
|||||||
9.5 Оптимизация колебательного процесса
Амплитуда вынужденных колебаний от переменной составляющей момента сопротивления определяется выражением (9.45)
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M × i31 |
|
|
|
|
|
||||
A** = |
|
|
|
|
c22 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
2 |
|
|
2 . |
|||||||
æ |
|
ö |
|
y |
||||||||||
ç |
1 - |
w III |
÷ |
+ |
|
|
|
|
||||||
ç |
|
|
K |
2 |
÷ |
|
|
4p |
2 |
|
|
|
||
è |
|
|
|
ø |
|
|
|
|
|
|
||||
Если бы переменная составляющая момента сопротивления - M была приложена статически, то она бы вызвала статическую деформацию
Aст. = |
M × i31 |
, рад. |
|
||
|
c22 |
|
Отношение амплитуды вынужденных колебаний – А** к статической деформации Аст. называется коэффициентом динамичности.
m = |
A** |
= |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Aст. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
ö 2 |
|
|
2 . |
(9.51) |
||||||||
|
æ |
|
|
y |
|||||||||||
|
|
ç |
1 - |
w III |
÷ |
+ |
|
|
|
|
|
||||
|
|
|
|
2 |
|
|
|
|
|||||||
|
|
ç |
|
K |
2 |
÷ |
|
4p |
|
|
|
|
|||
|
|
è |
|
|
ø |
|
|
|
|
|
|
||||
Без учета диссипации ψ = 0 выражение коэффициента динамичности упрощается
μ = |
|
1 |
|
|
|
|
ω III2 . |
(9.52) |
|||
1 − |
|||||
K 2 |
|
||||
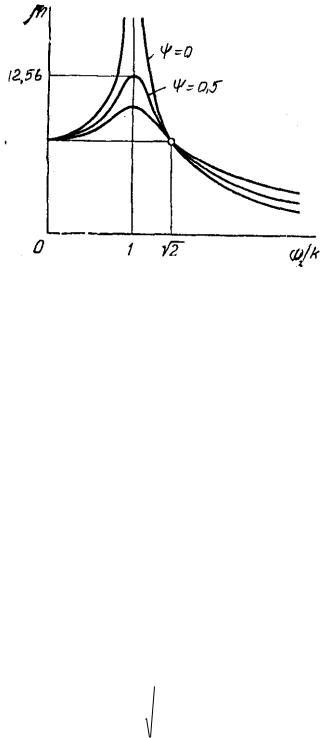
На рисунке 9.15 построены зависимости коэффициента динамичности μ – от отношения ω III  K при ψ = 0 и ψ = 0,5.
K при ψ = 0 и ψ = 0,5.
Рисунок 9.15
При ψ = 0, при изменении 0 ≤ |
ω III |
|
≤ 1 μ изменяется |
0 £ |
m £ ¥ . |
|||||||||||||
K |
||||||||||||||||||
|
|
|
|
ω III |
|
|
|
|
|
|
|
|
|
|
|
|||
При изменении 1 ≤ |
|
≤ |
∞ , μ изменяется ¥ £ |
m £ |
0 . При совпадении |
|||||||||||||
|
|
|||||||||||||||||
|
ω III |
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
||
частот |
= 1 (ωIII = |
К), |
μ = ∞ |
, т.е |
|
явление |
резонанса, амплитуда |
|||||||||||
K |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вынужденных колебаний A** = |
∞ . |
|
|
|
|
|
|
|
|
|
||||||||
При учете диссипативных сил y ¹ 0 , коэффициент динамичности μ |
||||||||||||||||||
имеет хотя и больше, но конечное значение. |
|
|
|
|
ω III |
|
||||||||||||
Резонансное значение коэффициента динамичности при |
= 1 |
|||||||||||||||||
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
= 2π |
|
|
K |
|||
|
|
|
|
|
|
μ рез = |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
ψ 2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
ψ . |
|
|
|
|
|||
При ψ = 0,5, |
μрез = 12,56. |
|
|
|
|
4π 2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||