

elektrotekhnika
.doc
|
37. Пуск двигателя. Механические характеристики двигателей постоянного тока. Пуск двигателей постоянного тока производится с помощью реостата r, включаемого в цепь якоря двигателя. Если производить пуск двигателя без пускового реостата (r = 0), то начальный пусковой ток будет ограничиваться лишь небольшим сопротивлением якоря, например для двигателей мощностью от 5 до 100 кВт окажется в 10 — 30 раз больше номинального 1. Такой ток недопустим прежде всего по условиям коммутации двигателя, так как при этом возникает недопустимо интенсивное искрение под щетками. Кроме того, при таком токе двигатель развивает слишком большой начальный пусковой момент, который может привести к недопустимым ускорениям и поломке механизмов. Пуск двигателя без пускового реостата при питании от сети относительно небольшой мощности сопровождается снижением напряжения сети, что ухудшает условия работы других потребителей. Механические характеристики. Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной. Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм.<0, и обеспечивают саморегулирование двигателя, т.е. он автоматически приспосабливается к изменяющейся нагрузке. Увеличение статического момента сопротивления на валу двигателя приводит к уменьшению угловой скорости и ЭДС якоря. Ток якоря, выражение для которого можно записать на основании (5.35), Iя= (Uя-Eя)/(R я+ R д)=(Uя -kωФ;)/( R я R д ), (5.39) возрастает. Соответственно растет электромагнитный момент вплоть до нового значения момента сопротивления (переход из точки А в точку В на механической характеристике). По аналогии на основании (5.37) может быть построено семейство искусственных характеристик при различных значениях Uя или Ф. |
38. Регулирование частоты вращения двигателя постоянного тока. Работа двигателей в тормозных режимах. Для получения высокой производительности и требуемой точности или шероховатости обработки изделий, остановки исполнительного органа производственной машины в нужном месте с заданной степенью точности и т. д. приходится принудительно изменять частоту вращения или скорость линейного перемещения исполнительного органа. Принудительное изменение частоты вращения или линейного перемещения исполнительного органа производственной машины в соответствии с требованием производственного процесса называется регулированием скорости. В настоящее время взамен коробок скоростей, вариаторов и т. п. все больше применяется электрическое регулирование частоты вращения, в основе которого лежит использование искусственных, механических характеристик электродвигателей. Электрическое регулирование частоты вращения приводит к упрощению, облегчению и удешевлению механической части машин и механизмов, упрощению управления, возможности получения плавного регулирования частоты вращения в широком диапазоне. При питании двигателей от источника постоянного напряжения (см. рис. 9.22) частоту вращения можно регулировать следующим образом: 1) изменением сопротивления цепи якоря; 2) изменением значения магнитного потока. серьезным недостатком регулирования частоты вращения путем изменения сопротивления в цепи якоря при обычных схемах включения двигателей (см рис 9.22) является сложность получения при различных нагрузках пониженных частот вращения из-за слишком «мягких» механических характеристик. Для устранения этого недостатка находят применение различные другие способы получения искусственных механических характеристик, отличающихся большей «жесткостью». В случаях особо высоких требований к «жесткости» механических характеристик находят применение различные варианты систем с регулируемым напряжением, подводимым к якорю двигателя. Регулирование частоты вращения двигателя можно производить двумя способами:
ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЕЙ Как известно, для сокращения времени торможения при остановке производственных машин и механизмов часто применяются механические тормоза. Сокращение времени торможения, особенно в случае непродолжительного цикла работы, приводит к существенному повышению производительности машин и механизмов. Недостатками механических тормозов являются быстрый износ трущихся поверхностей, сложность и необходимость периодического регулирования тормозящего усилия, необходимость дополнительного места для размещения тормоза и его соединения с механизмом. |
|||||||||||||||||
|
Электродвигатели постоянного тока могут работать в трех тормозных режимах: в режиме противовключения; в генераторном режиме с отдачей энергии в сеть; в режиме динамического торможения. . Режим противовключения. Режим противовключения представляет собой режим, в котором якорь двигателя под действием внешнего момента либо запаса кинетической энергии вращается в направлении, противоположном тому, в котором он должен был бы вращаться при данной схеме его включения в двигательном режиме (или вхолостую). . Генераторный режим с отдачей энергии в сеть. Генераторным режимом с отдачей энергии в сеть называется режим, в котором двигатель под действием внешнего момента либо запаса кинетической энергии вращается с частотой, большей частоты вращения холостого хода (n > n0), в том же направлении, в котором он должен был бы вращаться при данной схеме его включения в двигательном режиме (или вхолостую). . Режим динамического торможения. Режим динамического торможения возникает при отключении якоря двигателя от сети и замыкании его на резистор, называемый резистором динамического торможения. Естественно, что поскольку электродвигатель работает при этом по существу как генератор, он развивает тормозной момент (см. принцип действия генератора в § 9.2) Вырабатываемая им электрическая энергия расходуется в сопротивлении динамического торможения и частично в сопротивлениях якоря двигателя.
|
39. Сравнительная оценка свойств и областей применения двигателей постоянного тока разных способов возбуждения. Свойства и характеристики двигателей постоянного тока существенно зависят от того, как меняется магнитный поток двигателей при изменении их механической нагрузки. Характер изменения магнитного потока зависит в свою очередь от числа и способа включения обмоток возбуждения, т. е. от способа возбуждения двигателей. В зависимости от способа возбуждения различают:
|
|||||||||||||||||
|
40. Назначение и области применения трансформаторов. Устройство и принцип действия. Трансформатор — статический электромагнитный аппарат, его действие основано на явлении взаимной индукции, он предназначен для преобразования электрической энергии переменного тока с параметрами U1, I1 в энергию переменного тока с параметрами U2, I2 той же частоты. Принцип индуктивной связи двух обмоток впервые открыт Фарадеем в 1831 г. В период 1870—1880 гг. был создан однофазный трансформатор с разомкнутым магнитопроводом, а в 1880—1890 г. была осуществлена разработка трансформатора с замкнутым магнитопроводом, который усиливал магнитную связь между обмотками и обеспечивал повышенные технико-экономические показатели трансформатора. Трансформатор (рис. 8.1) состоит из ферромагнитного магнитопровода 1, собранного из отдельных листов электротехнической стали, на котором расположены две (w1, w2) обмотки, выполненные из медного или алюминиевого провода. Обмотку, подключенную к источнику питания, принято называть первичной, а обмотку, к которой подключаются приемники, - вторичной. Все величины, относящиеся к первичной и вторичной обмоткам, принято соответственно обозначать индексами 1 и 2. Величина n называется коэффициентом трансформации трансформатора. Электрическая энергия из первичной цепи во вторичную в трансформаторе передается посредством переменного магнитного потока, поскольку гальваническая связь между первичной и вторичной обмотками трансформатора отсутствует. ОБЛАСТИ ПРИМЕНЕНИЯ ТРАНСФОРМАТОРОВ Передача электрической энергии большой мощности на большие расстояния технически возможна и экономически целесообразна при малых сечениях проводов линии передачи и малых потерях энергии в них. Сечение проводов и потери мощности в них определяются током, а ток при заданной мощности, как известно, зависит от напряжения: S = UI. Трансформаторы широко используются во всякого рода измерительных устройствах, радиоприемниках, телевизорах, осциллографах, для местного освещения и т. п. В этих случаях трансформатор преобразует имеющееся стандартное напряжение электрической сети в напряжение другого значения, которое необходимо для питания отдельных элементов электротехнических устройств. Во многих случаях трансформаторы имеют несколько обмоток. Трансформаторы используются в сварочных и электротермических установках. Трансформаторы широко используются при измерении тока, напряжения и мощности в электрических цепях с большим напряжением или с большими токами. Они называются измерительными. Существует много специальных трансформаторов, работающих во всякого рода автоматических установках, напряжение на их обмотках во многих случаях несинусоидальное. В этой книге рассматриваются трансформаторы, работающие в цепях синусоидального тока. |
42. Идеальный и реальный трансформаторы. Векторная диаграмма и схемы замещения. Идеальный трансформатор — трансформатор, у которого отсутствуют потери энергии на гистерезис и вихревые токи и потоки рассеяния обмоток[9]. В идеальном трансформаторе все силовые линии проходят через все витки обеих обмоток, и поскольку изменяющееся магнитное поле порождает одну и ту же ЭДС в каждом витке, суммарная ЭДС, индуцируемая в обмотке, пропорциональна полному числу её витков[10]. Такой трансформатор всю поступающую энергию из первичной цепи трансформирует в магнитное поле и затем в энергию вторичной цепи. В этом случае поступающая энергия равна преобразованной энергии:
Соединив это уравнение с отношением напряжений на концах обмоток, получим уравнение идеального трансформатора:
|
|||||||||||||||||
|
43. Режимы работы трансформатора. Опыты холостого хода и короткого замыкания, их назначение и условия проведения. 1. Режим холостого хода. Данный режим характеризуется разомкнутой вторичной цепью трансформатора, вследствие чего ток в ней не течёт. С помощью опыта холостого хода можно определить КПД трансформатора, коэффициент трансформации, а также потери в сердечнике. 2. Нагрузочный режим. Этот режим характеризуется работой трансформатора с подключенными источником в первичной и нагрузкой во вторичной цепи трансформатора. Данный режим является основным рабочим для трансформатора. 3. Режим короткого замыкания. Этот режим получается в результате замыкания вторичной цепи накоротко. С его помощью можно определить потери полезной мощности на нагрев проводов в цепи трансформатора. Это учитывается в схеме замещения реального трансформатора при помощи активного сопротивления. Режим холостого хода Когда вторичные обмотки ни к чему не подключены (режим холостого хода), ЭДС индукции в первичной обмотке практически полностью[12] компенсирует напряжение источника питания, поэтому ток, протекающий через первичную обмотку, равен переменному току намагничивания, нагрузочные токи отсутствуют. Для трансформатора с сердечником из магнитомягкого материала (ферромагнитного материала, трансформаторной стали) ток холостого хода характеризует величину потерь в сердечнике (на вихревые токи и на гистерезис) и реактивную мощность перемагничивания магнитопровода. Мощность потерь можно вычислить, умножив активную составляющую тока холостого хода на напряжение, подаваемое на трансформатор. Для трансформатора без ферромагнитного сердечника потери на перемагничивание отсутствуют, а ток холостого хода определяется сопротивлением индуктивности первичной обмотки, которое пропорционально частоте переменного тока и величине индуктивности.
|
Режим короткого замыкания В
режиме короткого замыкания, на первичную
обмотку трансформатора подаётся
переменное напряжение небольшой
величины, выводы вторичной обмотки
соединяют накоротко. Величину напряжения
на входе устанавливают такую, чтобы
ток короткого замыкания равнялся
номинальному (расчётному) току
трансформатора. В таких условиях
величина напряжения короткого замыкания
характеризует потери в обмотках
трансформатора, потери на омическом
сопротивлении. Мощность потерь можно
вычислить, умножив напряжение короткого
замыкания
Режим с нагрузкой. При подключении нагрузки к вторичной обмотке во вторичной цепи возникает нагрузочный ток, создающий магнитный поток в магнитопроводе, направленный противоположно магнитному потоку, создаваемому первичной обмоткой. В результате в первичной цепи нарушается равенство ЭДС индукции и ЭДС источника питания, что приводит к увеличению тока в первичной обмотке до тех пор, пока магнитный поток не достигнет практически прежнего значения.Схематично, процесс преобразования можно изобразить следующим образом:
|
|||||||||||||||||
|
44. Потери энергии и КПД. Внешняя характеристика трансформатора. Зависимость напряжения на вторичной обмотке трансформатора от тока нагрузки U2 = f(I2) при U1 = const и cos φ2 = const называется внешней характеристикой. Из уравнения (8.15) для упрощенной схемы замещения трансформатора следует, что с изменением тока во вторичной обмотке (тока нагрузки I2) напряжение на вторичной обмотке изменяется. Значение напряжения на вторичной обмотке определяется не падением напряжения, а потерей напряжения в обмотках. Потеря напряжения есть арифметическая разность между первичным и приведенным вторичным напряжением: ΔU'2 = U1 - U'2. В трансформаторе теряется энергия в обмотках и в магнитопроводе. Потери мощности в обмотках равны ΔРм = I12r1 + I22r2 = I12rк . Потери мощности в магнитопроводе составляют
где G— масса магнитопровода, кг; Вm — амплитуда магнитной индукции, Тл; ΔР10 — удельные потери в стали, Вт/кг, при Вm = 1 Тл и f = 50 Гц; ΔР15 — удельные потери в стали, Вт/кг, при Вm = 1,5 Тл и f = 50 Гц; f — частота тока в обмотках, Гц. |
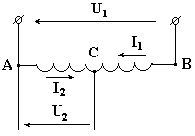
45. Специальные типы трансформаторов. Трехфазные трансформаторы. ТРЕХФАЗНЫЕ ТРАНСФОРМАТОРЫ Создание трехфазных трансформаторов относится к периоду 1889 — 1891 гг. Первые промышленные образцы трансформаторов созданы выдающимся русским электротехником М. О. Доливо-Добровольским. Специальные типы трансформаторов Наиболее часто в электротехнических установках используются следующие специальные типы трансформаторов: автотрансформаторы, многообмоточные и трехфазные трансформаторы. Автотрансформатором называется такой трансформатор, у которого имеется только одна обмотка, часть которой принадлежит одновременно вторичной и первичной цепям. Схема однофазного трансформатора изображена на рис. 10.9.
Режим
холостого хода автотрансформатора,
когда I2
= 0, ничем не отличается от режима
холостого хода обычного трансформатора.
Подводимое к
трансформатору напряжение U1
= UAB
равномерно распределяется между
витками первичной о
где Автотрансформаторы выгодно использовать в тех случаях, когда коэффициент трансформации близок к единице. Многообмоточные (одна первичная и несколько вторичных) трансформаторы используются в радиотехнических схемах для получения нескольких напряжений. В режиме холостого хода работа таких трансформаторов не отличается от двухобмоточных. В трехфазной сети переменного тока преобразование напряжений осуществляется с помощью трехфазного трансформатора с общим для трех фаз сердечником. В трехфазном трансформаторе с общим магнитопроводом магнитный поток любой из фаз может замыкаться через стержни, на которых расположены обмотки двух других фаз. Затраты стали на трехфазный трансформатор значительно меньше, чем на три однофазных трансформатора |
|||||||||||||||||
|
46. Устройство трехфазной асинхронной машины. Возбуждение вращающегося магнитного поля. Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в механическую. Благодаря простоте устройства, высокой надежности в эксплуатации и меньшей стоимости по сравнению с другими двигателями асинхронные двигатели трехфазного тока нашли широкое применение в промышленности и сельском хозяйстве. С их помощью приводятся в движение металлорежущие и деревообрабатывающие станки, подъемные краны, лебедки, лифты, эскалаторы, насосы, вентиляторы и другие механизмы. Получение вращающегося магнитного поля Условия получения:
В трёхфазной машине при одной паре полюсов (p=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (p=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д. |
47. Принцип действия трехфазного асинхронного двигателя и области применения. В обмотке статора, включенной в сеть трехфазного тока, под действием напряжения возникает переменный ток, который создает вращающееся магнитное поле. Магнитное поле пересекает проводники обмотки ротора и наводит в них (на основании закона электромагнитной индукции е = Blv) переменную ЭДС, направление которой определяется по правилу правой руки и указано на рис. 10.12 крестиками. Поскольку обмотка ротора замкнута, ЭДС вызывает в ней ток того же направления. В результате взаимодействия тока ротора с вращающимся магнитным полем (на основании закона Ампера F = ВlI) возникает сила, действующая на проводники ротора, направление которой определяется по правилу левой руки. Сила создает момент, действующий в ту же сторону. Под действием момента ротор приходит в движение и после разбега вращается в том же направлении, что и магнитное поле, с несколько меньшей частотой вращения, чем поле: n = (0,92 ÷ 0,98) n0*.
|
|||||||||||||||||
|
48. Вращающий момент асинхронного двигателя. Мощность, потери и КПД, На ротор и полюсы статора действуют электромагнитные вращающие моменты, одинаковые по величине и направленные в противоположные стороны. Мощность, необходимая для вращения статорных полюсов с синхронной частотой,
Механическая мощность, развиваемая ротором,
|
50. Устройство и принцип действия синхронной машины. Синхронные машины используются в качестве генераторов, двигателей и синхронных компенсаторов. Устанавливаемые на тепловых электростанциях генераторы приводятся во вращение паровыми турбинами и называются турбогенераторами. Синхронные генераторы гидроэлектростанций вращаются с помощью гидротурбин и носят название гидрогенераторов. Кроме электростанций синхронные генераторы находят применение в установках, требующих автономного источника электроэнергии. Примером могут служить автомобильные электрические краны, на которых синхронные генераторы приводятся во вращение двигателями внутреннего сгорания. Принцип действия генератора. Если обмотку возбуждения генератора подключить к источнику постоянного тока, то МДС обмотки будет создано основное магнитное поле, характеризуемое магнитным потоком Ф0 и показанное на рис. 11.1, а с помощью двух линий магнитной индукции, изображенных пунктиром. При вращении ротора с помощью первичного двигателя магнитное поле будет также вращаться. Принцип действия двигателя. При работе синхронной машины в качестве двигателя обмотка якоря подключается к источнику трехфазного тока, в результате чего возникает вращающийся магнитный поток Фя. После разгона ротора до частоты вращения n, близкой к частоте вращения n0 поля якоря (см. § 11.10), его обмотка возбуждения подключается к источнику постоянного тока и возникает магнитный поток Ф0. Благодаря взаимодействию магнитного потока Фя и проводников обмотки ротора (или полюсов намагниченных сердечников якоря и ротора) возникает вращающий электромагнитный момент Мэм , действующий на ротор, и он втягивается в синхронизм, т. е. начинает вращаться с частотой вращения, равной частоте вращения n0 магнитного поля якоря. |
|||||||||||||||||
|
51. Синхронные генератор и двигатель. Двигательный режим Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка - кольцо), в маломощных — постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.) Запуск двигателя. Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать в синхронном режиме. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это явление называется «вход в синхронизм». Для разгона обычно используется асинхронный режим, при котором обмотки индуктора замыкаются через реостат или накоротко, как в асинхронной машине, для такого режима запуска в машинах на роторе делается короткозамкнутая обмотка, которая также выполняет роль успокоительной обмотки, устраняющей "раскачивание" ротора при синхронизации. После выхода на скорость близкую к номинальной (>95%) ( подсинхронная скорость ) индуктор запитывают постоянным током.
|
Генераторный режим. Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120 градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей.
|
|||||||||||||||||
|
52. Микромашины автоматических устройств. Электрические микромашины автоматических устройств гораздо разнообразнее микромашин общепромышленного применения, что объясняется спецификой выполняемых ими функций. Для них характерно не силовое преобразование энергии, а преобразование одной величины в другую. Например, электрического сигнала в механическое перемещение, углового смещения в напряжение и т.д. Такие показатели работы, как КПД, cosj, полезная мощность, весьма важные для силовых электрических машин общего применения, здесь оказываются несущественными. Главными являются требования высокой точности работы, хорошего быстродействия, надежности и стабильности характеристик. Микромашины автоматических устройств можно разделить на следующие группы: 1)исполнительные или управляемые микродвигатели; 2)информационные микромашины; 3)электромашинные усилители; 4)электрические микромашины гироскопических систем. Электрические микромашины по назначению разделяются на две группы:
|
53. Классификация электроизмерительных приборов. Наиболее существенным признаком для классификации электроизмерительной аппаратуры является измеряемая или воспроизводимая физическая величина, в соответствии с этим приборы подразделяются на ряд видов: амперметры — для измерения силы электрического тока; вольтметры — для измерения электрического напряжения; омметры — для измерения электрического сопротивления; мультиметры (иначе тестеры, авометры) — комбинированные приборы частотомеры — для измерения частоты колебаний электрического тока; магазины сопротивлений — для воспроизведения заданных сопротивлений; ваттметры и варметры — для измерения мощности электрического тока; электрические счётчики — для измерения потреблённой электроэнергии и множество других видов Кроме этого существуют классификации по другим признакам: по назначению — измерительные приборы, меры, измерительные преобразователи, измерительные установки и системы, вспомогательные устройства; по способу представления результатов измерений — показывающие и регистрирующие ( в виде графика на бумаге или фотоплёнке, распечатки, либо в электронном виде); по методу измерения — приборы непосредственной оценки и приборы сравнения; по способу применения и по конструкции — щитовые (закрепляемые на щите или панели), переносные и стационарные; по принципу действия: электромеханические (см. статью Системы измерительных приборов): магнитоэлектрические; электромагнитные; электродинамические; электростатические; ферродинамические; индукционные; магнитодинамические; электронные; термоэлектрические; электрохимические. |
|||||||||||||||||
|
54. Аналоговые и цифровые электроизмерительные приборы. Измерение тока, напряжения и мощности. Аналоговые электронные вольтметры. В радиоэлектронных цепях к вольтметрам, как и другим измерительным приборам, предъявляются повышенные требования, такие как ничтожно малое потребление мощности, частотный диапазон измеряемого напряжения от единиц герц до сотен мегагерц, и в то же время слабая зависимость показаний от частоты измеряемого напряжения, высокая чувствительность и т. д. Этим требованиям не соответствуют стрелочные вольтметры, которые осуществляют непосредственную оценку (прямой отсчет) измеряемого напряжения. Вышеперечисленным требованиям удовлетворяют аналоговые электронные вольтметры, использующие усилители измеряемых напряжений. Цифровые измерительные приборы. В настоящее время в технике радиоэлектронных измерений используются цифровые измерительные приборы (ЦИП), которые преобразуют измеряемую величину в дискретные или квантовые значения, осуществляют цифровое кодирование и выдачу результатов измерений в цифровом виде. К преимуществам ЦИП можно отнести: достаточно широкий диапазон измеряемых величин с высокой точностью измерений, возможность представления результатов измерения в цифровом виде, запись их цифропечатающим устройством, а также ввод получаемой информации об измеряемых величинах в ЭВМ. |
55. Измерение параметров электрических сетей. Измерение неэлектрических величин. Все более широкое распространение получают электрические методы измерения неэлектрических величин. Указанные методы основаны на преобразовании неэлектрической величины в электрическую. Элемент измерительного устройства, выполняющий эту функцию, называется первичным измерительным преобразователем. Преобразователи разделяются на две основные группы:
|
|||||||||||||||||
 бмотки.
Рис.
10.9
Вторичное
напряжение
бмотки.
Рис.
10.9
Вторичное
напряжение