

СОДЕРЖАНИЕ
Введение 5
Выбор электродвигателя 6
Кинематический и силовой расчет привода 9
Расчет механических передач 11
Ориентировочный расчет валов 33
Конструктивные размеры зубчатых колес 37
Конструктивные размеры корпуса редуктора 39
Проверка долговечности подшипников 40
Проверка прочности шпоночных соединений 53
Уточненный расчет валов 55
Выбор посадок деталей редуктора 60
Выбор соединительных муфт 61
Выбор смазки 62
Заключение 63
Список использованных источников 64 введение
Целью курсового проектирования является приобретение навыков принятия самостоятельных конструктивных решений, усвоение последовательности разработки механизмов общего назначения, закрепление учебного материала по расчету типовых деталей машин.
Задачей проекта является разработка привода ленточного конвейера.
Привод состоит из электродвигателя и двухступенчатого цилиндрического редуктора. Вращательное движение от электродвигателя редуктору передается ременной передачей.
Электродвигатель выбирается по требуемой мощности и ориентировочной частоте вращения. Зубчатые передачи проектируются по критерию контактной прочности активной поверхности зубьев. Все передачи проверяются по контактным, изгибным напряжениям, а также при действии пиковых нагрузок. Ориентировочный расчет валов проводится на чистое кручение по пониженным допускаемым напряжениям. Подшипники выбираем по характеру нагрузки на валы и по диаметрам валов, проверяем на долговечность по динамической грузоподъемности. Шпоночные соединения проверяем на смятие. Валы проверяются на сопротивление усталости по коэффициентам запаса прочности при совместном действии изгиба и кручения с учетом масштабных факторов и концентраторов напряжений.
Способ смазки и уровень масла обусловлены компоновкой механизма. Масло выбирается исходя из действующих контактных напряжений и окружной скорости в зацеплениях.
В результате работы должна быть получена компактная и эстетичная конструкция редуктора, отвечающая современным требованиям, предъявляемым к механизмам данного назначения.
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
Кинематическая схема привода и индексация кинематических звеньев
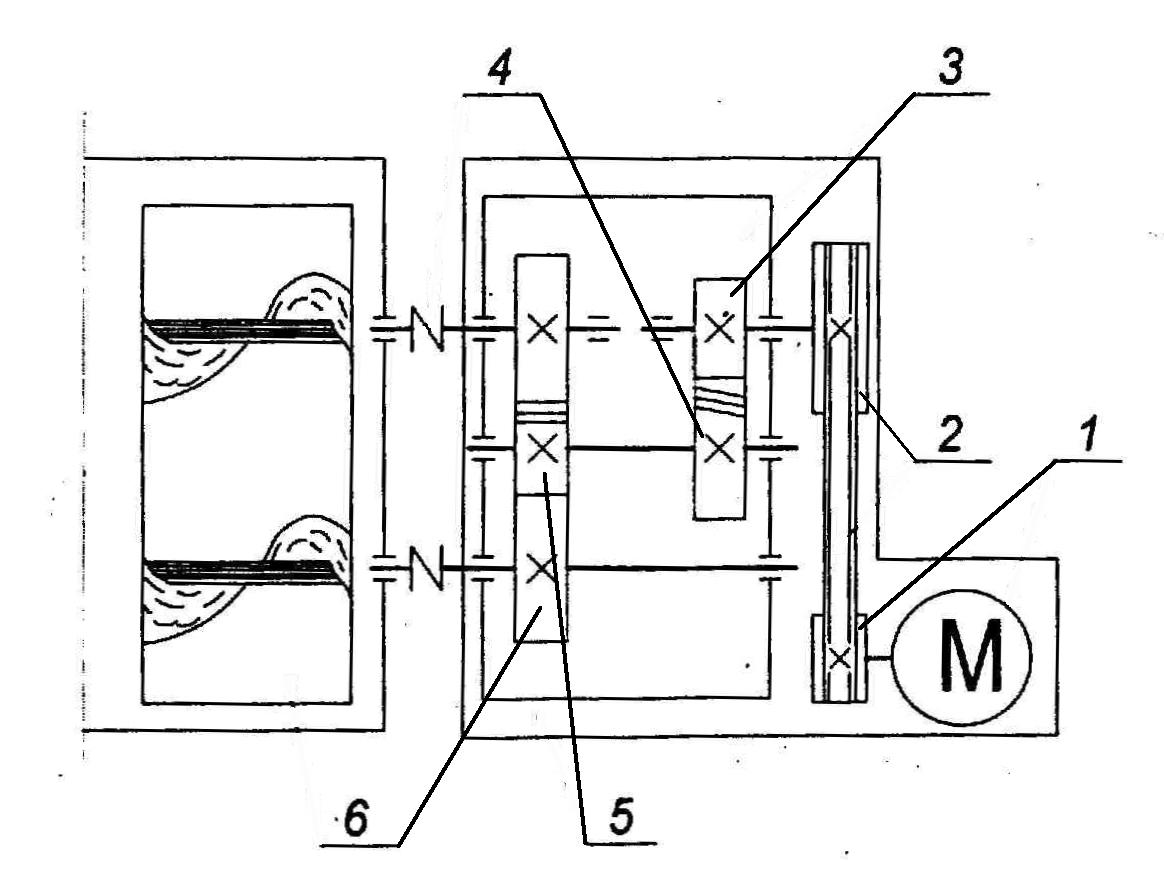
Рисунок 1.1 - Кинематическая схема привода
1 – ведущий шкив ременной передачи;
2 – ведомый шкив ременной передачи;
3 – шестерня цилиндрической косозубой передачи;
4 – колесо цилиндрической косозубой передачи;
5 – шестерня цилиндрической прямозубой передачи;
6 – колесо цилиндрической прямозубой передачи.
Присваиваем индексы валам в соответствии с размещенными на них звеньями передач:
1- вал электродвигателя;
2-3 – быстроходный (входной) вал редуктора;
4-5 – промежуточный вал;
6- тихоходный (выходной) вал редуктора.
В дальнейшем, параметры вращательного движения, геометрические параметры передач и другие величины будем обозначать в соответствии с индексами валов, к которым они относятся.
1.2 Определение требуемой мощности электродвигателя
![]() ,
,
где
![]() - номинальная мощность на валу
электродвигателя, кВт;
- номинальная мощность на валу
электродвигателя, кВт;![]() - общий коэффициент полезного действия
привода;
- общий коэффициент полезного действия
привода;![]() - мощность на каждом выходном валу, кВт.
- мощность на каждом выходном валу, кВт.
В качестве приводного используется трехфазный асинхронный электродвигатель переменного тока.
общ = 123456пn – общий КПД привода,
где 12, 34, м, п – КПД отдельных передач , соединительной муфты и подшипников. КПД подшипников п берется в степени n, равной числу пар подшипников в приводе.
Принимаем согласно /4/: п=0,993; 12=0,96; 34=0,97; 56=0,97;
тогда общ = 0,960,970,970,993 = 0,8764.
![]() кВт.
кВт.
1.3 Определение ориентировочной частоты вращения вала электродвигателя.
Требуемая частота вращения вала электродвигателя ориентировочно равна
n’эд = nдU’общ, (1.1)
где nд – частота вращения выходного вала, мин-1;
U’общ= U’12 U’34 U’56,
где
U’12
U’34
U’56
– передаточные числа 1-2, 3-4, 5-6 передач
соответственно, принимаем
![]() ,
,![]() ,
,![]() .
.
U’общ=2·4,5·5,5=49,5.
n’эд = 2549,5=1237об/мин,
Синхронная частота вращения вала электродвигателя по заданию
n’эд = 1500 об/мин
По каталогу /3/ выбираем электродвигатель с ближайшим к n’эд и Р’эд значениями. Таковым электродвигателем является АИР180М4 (см. рис.1.2).
Его параметры: Рэд= 30 кВт, nэд = 1470 об/мин, Тпуск / Тном = 2,7.
Эскиз электродвигателя
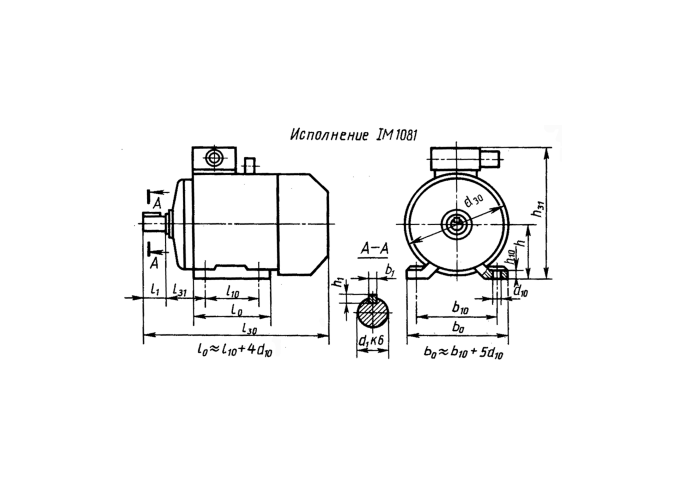
Рисунок 1.2
Таблица 1.1 Основные размеры электродвигателя, мм.
|
Тип двигателя |
Число полю-сов |
d1 |
d30 |
l1 |
l30 |
l10 |
l31 |
d10 |
b10 |
h31 |
b1 |
h1 |
h10 |
|
АИР180М4 |
4 |
55 |
375 |
110 |
680 |
241 |
121 |
15 |
279 |
448 |
16 |
10 |
20 |