

ТЕМА 8. Зрівноваж. та віброзахист машин
.pdfТЕМА 8. ЗРІВНОВАЖУВАННЯ ТА ВІБРОЗАХИСТ МАШИН
8.1. Причини, що викликають необхідність зрівноважування та віброзахисту машин
1. |
Якщо рух ланок відбувається з прискореннями, у кінематичних |
|
|
парах виникають змінні динамічні реакції (зусилля). Ці зусилля |
|
|
зумовлюють інтенсивне |
зношування кінематичних пар, |
|
що скорочує час та надійність роботи машин. |
|
2. |
Пружні коливання ланок |
також негативно відбиваються |
|
на роботі машин. |
|
3.Небезпечні коливання, які викликають вібрацію фундаменту.
8.2.Задачі зрівноважування та віброзахисту машин
1.Зменшення тиску стояка на фундамент чи основу.
2.Зменшення зусиль у кінематичних парах механізму.
3. Зменшення параметрів |
коливань |
до |
меж, безпечних |
для оточуючого середовища та обслуговуючого персоналу. |
|||
8.3. Умова зрівноваженості обертової ланки |
|||
Обертове тіло (якір електродвигуна, шпиндель токарного |
|||
верстата, шліфувальний круг, |
зубчасте |
колесо, |
колінвал тощо) |
у теорії балансування називають ротором.
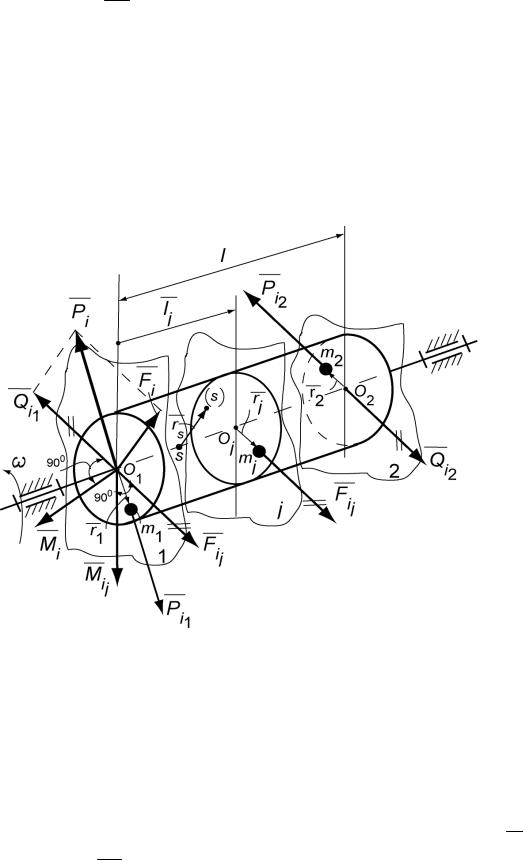
На рис. 8.1 показано ротор, який обертається у нерухомих опорах із кутовою швидкістю const.
Залежно від положення центра мас обертового ротора на підшипники може передаватися додаткове навантаження від сили інерції мас.
Розглянемо, за яких умов на опори не будуть передаватись додаткові динамічні навантаження від сили інерції мас.
На відстані lj від лівого торця ротора проведемо площину j,
на якій виділимо елементарну точкову масу mj з радіальною
координатою rj від осі обертання ротора (центр Oj ).
Відцентрова сила інерції точкової маси дорівнює:
F |
m |
j |
a |
j |
m |
j |
2 |
r |
j |
, |
(8.1) |
ij |
|
|
|
|
|
|
|||||
де aj - нормальне прискорення точки; aj 2 rj .
Приведемо відцентрову силу інерції до однієї, довільно вибраної площини, нехай вона збігається з лівою торцевою
146
площиною 1. Силу Fij |
прикладемо у точці |
O1 на вісі обертання. |
|||||||||||
Маємо також момент |
пари |
|
сил |
|
, |
вектор якого лежить |
|||||||
Mij |
|||||||||||||
у площині 1, і визначається за формулою: |
|
||||||||||||
|
|
|
|
|
|
|
|
, |
|
||||
|
|
|
Mij |
Fij |
lj |
(8.2) |
|||||||
де |
|
- радіус-вектор точки mj |
відносно точки O1. |
||||||||||
lj |
|||||||||||||
Рис. 8.1. До умови зрівноваженості обертової ланки Можемо записати:
|
mj 2 |
|
|
|
. |
|
Mij |
rj |
lj |
(8.3) |
Але обертове тіло – це система матеріальних точок (точкових мас), тому після додавання отримаємо головний вектор Fi
і головний момент Mi сил інерції.
147
|
|
|
|
|
n |
|
n |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 mj |
|
|
. |
|
||||
|
|
Fi |
Fij |
|
rj |
|
||||||||||
|
|
|
|
j 1 |
|
j 1 |
|
|
|
|
|
|
|
|||
|
|
|
|
n |
|
n |
|
|
|
|
|
|
. |
|||
|
Mi |
|
Mij |
|
2 mj |
rj |
|
lj |
||||||||
|
|
|
|
j 1 |
|
j 1 |
|
|
|
|
|
|
|
|||
Із курсу теоретичної механіки відома залежність:
n
mj rj m rS - статичний момент мас,
(8.4)
(8.5)
j 1
де m - маса ланки; rS |
- радіус-вектор центра мас |
S ланки, |
|||||||||||
перпендикулярний до осі обертання. |
|
|
|
||||||||||
Із урахуванням цієї залежності маємо: |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
m 2 |
|
. |
(8.6) |
|
|
|
|
|
|
|
|
|
F |
r |
|||
|
|
|
|
|
|
|
|
|
i |
S |
|
||
Головний вектор |
|
|
|
за величиною і напрямком |
збігається |
||||||||
Fi |
|
||||||||||||
з нормальною силою інерції центра мас ланки S, якщо у точці S |
|||||||||||||
зосередити всю її масу. |
Fi |
|
знаходиться в площині 1 і прикладений |
||||||||||
у точці O1. |
|
|
|
|
|
|
|||||||
n |
|
|
|
|
|
|
|||||||
Сума mj |
|
|
|
|
називається відцентровим |
моментом |
|||||||
rj |
lj |
||||||||||||
j 1
інерції ланки відносно осі O1 O2 та площини 1; позначається Ilr :
n |
rj |
lj . |
|
Ilr mj |
(8.7) |
j 1
Підставивши його у вираз для Mi , маємо:
|
Mi |
|
2 |
Ilr |
. |
|
|
|
|
(8.8) |
|
||
Так як вектори всіх |
моментів |
|
паралельні |
площині |
1, |
||||||||
Mi j |
|||||||||||||
то і вектор головного моменту |
|
також |
паралельний |
площині |
1 |
||||||||
Mi |
|||||||||||||
(знаходиться у ній). |
|
|
|
|
|
|
|
|
|
|
|
||
Систему сил, яку складають головний вектор |
Fi |
|
і головний |
||||||||||
момент Mi можна замінити системою двох сил.
148

Для цього проведемо через точку О2 (у загальному випадку довільну), яка знаходиться у правій торцевій площині, площину 2, перпендикулярну до осі, і замінимо головний момент сил інерції Mi
двома силами |
Qi |
і |
Qi |
|
, які |
знаходяться |
|
у площинах |
|
1 і |
2 і |
||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
прикладені у точках O1 |
і О2 . Сила Qi |
|
перпендикулярна до вектора |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
, а сила |
|
паралельна і протилежна силі |
|
. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
Mi |
Qi |
Qi |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Величина цих сил: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
Mi |
|
, |
|
|
|
|
|
|
|
|
(8.9) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
де l - відстань між площинами 1 і 2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
Напрямки |
|
|
|
|
|
|
і |
|
|
|
визначаються напрямком |
|
|
|
. |
Додаючи |
|||||||||||||||||||||
|
|
|
Qi |
|
|
Qi |
|
Mi |
|||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
у площині 1 сили |
Fi |
|
і |
Qi |
|
, отримуємо сумарну силу |
Pi |
|
, яка лежить |
||||||||||||||||||||||||||||||
у площині 1 (т. O1). |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
(8.10) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pi |
Fi |
Qi |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Напрямок |
|
|
|
|
|
|
відрізняється |
|
|
від |
напрямку |
|
сили |
|
|
||||||||||||||||||||||
|
|
|
|
|
Pi |
|
|
|
|
Qi |
|||||||||||||||||||||||||||||
(площина 2). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Таким чином, система всіх нормальних сил інерції точок ланки |
|||||||||||||||||||||||||||||||||||||
виявилась зведеною |
до |
|
двох |
перехресних сил |
|
|
|
і |
|
|
, |
які |
|||||||||||||||||||||||||||
|
Pi |
|
|
|
Qi |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
знаходяться у паралельних площинах 1 і 2 (утворюють так званий
“хрест сил”).
Із рівнянь для Fi |
і Mi |
бачимо, що система буде |
|||||||
зрівноваженою, якщо: |
|
|
|
|
|
|
|||
|
|
0; |
|
0. |
(8.11) |
||||
|
Fi |
Mi |
|||||||
Так як 0,m 0, то |
|
0; |
|
|
0. |
||||
rS |
Ilr |
||||||||
Висновки:
1.Обертова ланка буде зрівноваженою, тобто у кінематичних парах не будуть виникати динамічні зусилля, якщо вісь обертання цієї ланки є центральною і однією з головних осей інерції, тобто вільною віссю обертання.
149

2.Обертову ланку можна зрівноважити двома додатковими масами (противагами), які розміщені в двох довільно вибраних паралельних площинах.
Сили інерції цих мас:
|
|
|
|
P |
|
|
|
|
m |
r |
|
2 |
|
P |
. |
|
(8.12) |
|
|
|
||||||||||||
|
|
|
|
i |
|
|
|
|
1 |
1 |
|
|
|
|
i |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
m |
|
|
|
|
|
|
2 |
|
|
. |
(8.13) |
|
|
|
||||||||||||
|
|
|
P |
|
|
2 |
|
r |
Q |
|
|
|
||||||||||||||||||||
|
|
|
|
i2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
i2 |
|
|
|
|
|
|
|
|
||||||
|
|
Із цих рівнянь можна визначити статичні моменти мас m1 |
|
|
|
|||||||||||||||||||||||||||
r1 |
||||||||||||||||||||||||||||||||
і m2 |
|
, а потім, задавшись |
масою |
противаг |
m1 і m2, визначити |
|||||||||||||||||||||||||||
r2 |
||||||||||||||||||||||||||||||||
радіуси їх розташування |
|
|
і |
|
|
, |
чи навпаки, |
задавшись |
|
і |
|
, |
||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||
r1 |
r1 |
|||||||||||||||||||||||||||||||
|
r2 |
r2 |
||||||||||||||||||||||||||||||
визначити маси m1 і m2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
8.4. Балансування обертових мас
Технологічний процес, за допомогою якого досягається зрівноваженість обертової ланки, називається балансуванням.
Розрізняють статичне і динамічне балансування.
При статичному балансуванні центр мас ланки зміщують на вісь обертання. Умова статичної зрівноваженості:
Fi 0; rS |
0. |
(8.14) |
При динамічному балансуванні одну з головних осей інерції ланки суміщають із віссю обертання. Умова динамічної зрівноваженості:
Fi |
0; |
Mi |
0. |
(8.15) |
||
|
|
0; |
|
|
0. |
(8.16) |
|
rS |
Ilr |
||||
8.4.1. Статичне балансування
Статичне балансування виконують для деталей, у яких довжина циліндра менша від його діаметра (маховики, диски, шківи, зубчасті колеса тощо), тобто l d.
У цьому випадку сили інерції приводять до головного
вектора сил інерції Fi , який прикладений у центрі мас ланки.
150
Задачею балансування у цьому випадку буде визначення такої додаткової маси (противаги), нормальна сила інерції якої
зрівноважить силу Fi . Якщо закріпити таку масу на ланці, загальний центр мас буде знаходитись на вісі обертання.
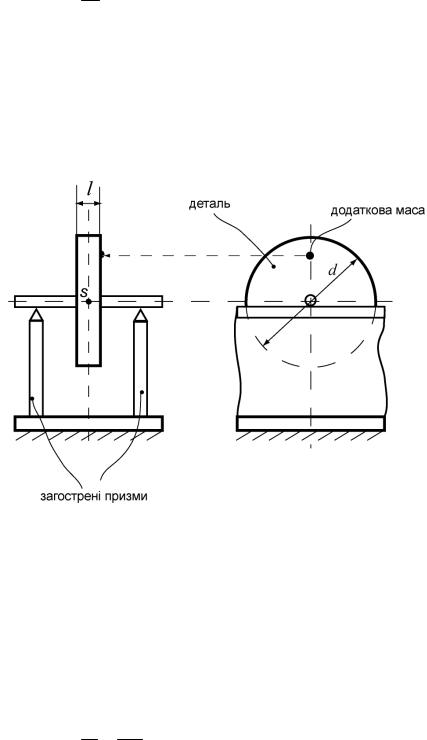
Схема статичного балансування наведена на рис. 8.2. Деталь встановлюють на горизонтальних загострених
призмах. Послідовним додаванням або видаленням додаткового матеріалу по вертикальній вісі досягають стану “байдужої” рівноваги деталі на горизонтальних загострених призмах.
Рис. 8.2. Статичне балансування
8.4.2. Динамічне балансування
Динамічне балансування проводять на спеціальних верстатах (рис. 8.3) для деталей, довжина циліндра яких досить велика порівняно з його діаметром: l d .
Задача балансування у цьому випадку – визначення таких двох додаткових мас (противаг), нормальні сили інерції яких
зрівноважать сили Pi і Qi2 , які складають “хрест сил”.
Закріпленням цих мас на роторі досягають того, щоб вісь обертання була головною центральною віссю інерції.
Деталь, яку балансують, закріплюють через підшипники кочення на стояках, які закріплені на платформі, шарнірно
151

встановленій на вісі О відносно опори. Протилежна сторона платформи має пружну опору.
Рис. 8.3. Динамічне балансування
А – фрикційний диск; М - електродвигун
Площини для розміщення |
додаткових мас |
суміщені |
з торцевими площинами ротора |
(їх називають |
“площини |
виправлення”). |
|
|
На верстаті деталь, що балансують, розміщують таким чином, щоб одна з площин виправлення проходила через вісь О гойдання платформи.
Розгін ротора здійснюють через фрикційний диск А, закріплений на валу двигуна М . Ротору надають кутову швидкість, дещо більшу за власну резонансну кутову швидкість (резонансну частоту) системи.
Після вимикання двигуна, кутова швидкість зменшується; в момент переходу системи через резонанс ( рез ) вимірюють
амплітуду коливань платформи індикатором годинникового типу. Амплітуда коливань буде пропорційна величинам
неврівноважених статичних моментів мас ротора.
Спочатку визначають масу та її положення у площині 1, потім, переставивши ротор в опорах на 1800, визначають неврівноважену масу та її координати у площині 2.
152
Є аналітичні та графічні способи визначення величин і координат мас у площинах виправлення.
8.5.Зрівноважування механізмів на фундаменті
8.5.1.Умова зрівноваженості механізму
Механізм вважається зрівноваженим, якщо зусилля, що передаються на фундамент є сталими величинами, тобто якщо головний вектор і головний момент зусиль стояка на фундамент є сталими величинами.
Fф const. Mф const. |
(8.17) |
Нехай F , M - головний вектор і головний момент усіх зовнішніх сил, що діють на ланки механізму та передаються на стояк.
Fi , Mi - головний вектор і головний момент сил інерції ланок механізму, що передаються на стояк.
Згідно з принципом Д'Аламбера маємо рівняння рівноваги:
F Fi F |
0 |
||||||
|
|
|
|
|
ф |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
М М i M |
ф |
0 |
|||||
|
|
|
|
|
|
|
|
але, якщо Fф const, то необхідно, щоб і
(8.18)
F Fi const, а також,
якщо Mф const, то необхідно, щоб і M Mi const.
Якщо досягти, щоб Fi 0 і |
Mi 0, тоді механізм буде |
зрівноваженим.
Досягти цієї умови повністю важко, тому частіше прагнуть,
щоб Fi 0, тобто здійснюють статичне зрівноважування механізму.
8.5.2. Статичне зрівноважування механізмів
Для статичного зрівноважування механізмів необхідно
виконати умови: Fi 0, тобто |
Fi maS , де aS - прискорення |
центра мас механізму. Якщо aS 0, то і Fi 0.
Така ситуація може бути при рівномірному поступальному русі тіла, але в реальному механізмі цього досягти неможливо.
153
Можна добитись, щоб vS 0, тобто щоб швидкість центра мас дорівнювала нулю. Це залежить від типу механізму.
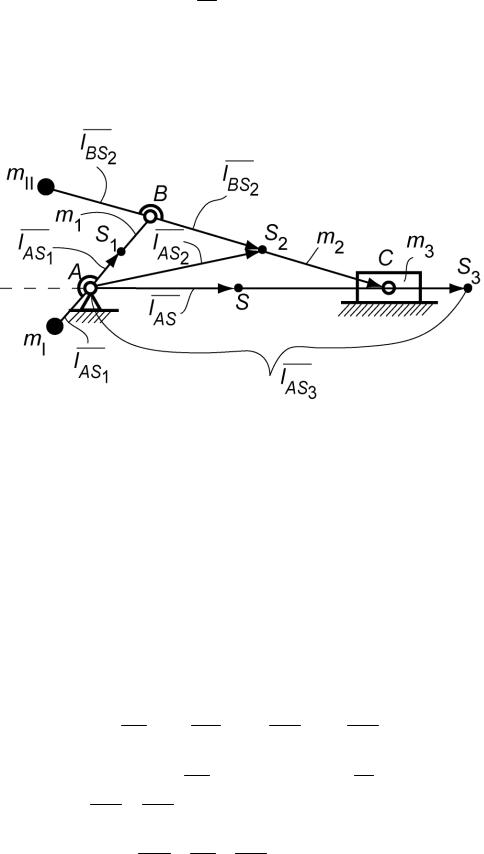
Розглянемо можливість статичного зрівноважування на прикладі кривошипно-повзунного механізму (рис. 8.4).
Рис. 8.4. Статичне зрівноважування механізму на фундаменті
Позначимо:
m1,m2 ,m3 ,m - маси ланок і всього механізму.
S1,S2 ,S3 ,S - центри мас ланок і всього механізму.
m m1 m2 m3.
Ланки механізму позначимо як вектори lAB ,lBC . Сума статичних моментів мас:
mlAS m1 lAS1 m2 lAS2 m3 lAS3 .
Якщо добитись, щоб lAS const, то буде vS 0.
Виразимо lAS2 і lAS3 .
lAS2 lAB lBS2 .
(8.19)
(8.20)
(8.21)
154

lAS3 lAB lBC lCS3 . |
(8.22) |
Після підстановки цих рівнянь у рівняння (8.20), додавання векторів одного напрямку та ділення на m, маємо:
|
|
|
|
|
m2 |
m3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
m1 |
lAS1 |
lAB |
|
|
m2 |
|
lBS2 |
m3 |
lBC |
|
|
m3lCS3 |
. |
|
(8.23) |
|||||||||||||||||||||||||||||
|
lAS |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
||||||||||||||||
|
Під час |
руху |
механізму вектори |
|
|
|
|
|
|
|
|
і |
|
|
змінні |
||||||||||||||||||||||||||||||||
|
lAB |
,lAS |
|
,lBC |
lBS |
2 |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
за напрямком, а вектор |
|
|
|
|
|
завжди сталий (const). |
|
|
|
||||||||||||||||||||||||||||||||||||||
lCS3 |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
Для того, щоб вектор |
|
|
|
|
|
був сталим |
(const), |
необхідно, |
||||||||||||||||||||||||||||||||||||||
|
lAS |
|
|||||||||||||||||||||||||||||||||||||||||||||
щоб виконувались такі умови: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
m1 |
|
|
|
m2 m3 |
|
|
|
|
0. |
|
|
|
|
|
|
|
|
|
|
(8.24) |
|||||||||||||||||||||
|
|
|
|
|
|
lAS |
lAB |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
m2 |
|
|
m3 |
|
0. |
|
|
|
|
|
|
|
|
|
|
(8.25) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
lBS2 |
lBC |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
Звідки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 |
|
m3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
lAS1 |
|
lAB |
|
|
|
|
|
|
|
|
|
|
(8.26) |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
- це відстань від осі обертання кривошипа до центра мас 1-ої ланки.
|
|
m3 |
|
|
. |
|
|
lBS2 |
lBC |
(8.27) |
|||||
m2 |
|||||||
|
|
|
|
|
|
Досягти умови рівноваги можна, якщо поставити противаги m і m так, як показано на рис. 8.4.
Противагу m встановити нескладно, а m - конструктивно
важко виконати.
На практиці обмежуються частковим статичним зрівноважуванням, тобто встановленням лише противаги m .
Для статичного зрівноважування більш складних механізмів уводять додаткові кінематичні ланцюги (див. [1], стор. 280-290).
155