

Лекции термех
.pdf
|
|
|
|
ПЛОСКОЕ ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА. СКОРОСТЬ |
17 |
|||||||||||||||||
Плоское движение тела – это движение, при котором все точки перемещаются параллельно |
|
|||||||||||||||||||||
некоторой неподвижной плоскости |
|
|
(1) |
x A= x (t ) |
|
y |
|
|
||||||||||||||
Плоское движение тела эквивалентно движению отрезка АВ и |
|
|
|
|||||||||||||||||||
(2) |
y A= y(t ) |
|
|
r B |
B |
|||||||||||||||||
раскладывается на два типа движения: поступательное движение |
|
|
||||||||||||||||||||
(3) |
ϕAB=ϕ(t) |
|
|
φ x |
||||||||||||||||||
точки А (полюса) и вращательное движение отрезка АВ вокруг |
|
r A |
||||||||||||||||||||
полюса. |
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
r B=r A+r AB |
|
A |
||||||
В векторной форме уравнение движения и скорость отдельных |
|
|
||||||||||||||||||||
(5) |
v B=v A+v AB |
|
|
|
||||||||||||||||||
точек определяются по следующим общим формулам: |
|
|
|
|
||||||||||||||||||
Теорема о проекциях. Проекции векторов |
(6) |
v A cos(α )=vB cos(β ) |
|
|
α |
v A |
B |
|||||||||||||||
скоростей двух точек на общую ось равны между собой. |
|
|
|
|
A |
|
v AB |
β |
||||||||||||||
Мгновенный центр вращения – точка плоскости, скорость которой в данный |
|
|||||||||||||||||||||
|
|
v B |
||||||||||||||||||||
момент времени равна нулю. |
|
v A |
|
A |
|
|
|
|
|
|||||||||||||
СПОСОБЫ ГЕОМЕТРИЧЕСКОГО |
|
|
|
|
|
v A |
II |
|
|
|||||||||||||
A |
I |
|
|
v B |
|
|
||||||||||||||||
ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ МЦВ |
|
B |
|
|
|
|
||||||||||||||||
Если в качестве полюса вращения А выбрать |
|
B |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
МЦВ РАВ , то формула 4 упрощается к виду |
PAB |
|
|
|
P |
|
|
|
|
|
||||||||||||
v |
B |
=v |
A |
+v |
AB |
=v |
P |
+v |
BP |
=v |
BP |
v B |
|
|
AB |
|
A |
v A |
|
|||
(7) v |
=v |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
B |
PB |
=ω PB=ω |
PB |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
PB |
|
|
|
AB |
|
|
A |
|
|
|
|
|
|
|
IV |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v A |
|
|
|
|
|
|
||
где ω АВ – угловая скорость вращения отрезка |
III |
|
|
|
|
PAB |
|
|||||||||||||||
|
|
|
|
|
|
|||||||||||||||||
АВ вокруг МЦВ РАВ ; |
|
|
|
|
B |
|
|
|
|
v B |
B |
|
|
|||||||||
РB – расстояние от точки В до МЦВ РАВ. |
|
|
v B |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PAB = ∞ |
|
|
|
|
|
|
||

|
|
|
|
ПЛОСКОЕ ДВИЖЕНИЕ. ПРИМЕРЫ НА СКОРОСТЬ |
|
18 |
||||||||||||||||||||||||
|
|
Пример 1. Палка АВ длиной 0,5 метра летит параллельно плоскости рисунка. |
B |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Известны направления скоростей точек А и В, кроме того известна величина |
|
|
|
|
|
|
|
|||||||||||||||||||||||
скорости точки А 3 м/с. Найти скорость точки В, угловую скорость вращения палки АВ. |
PAB |
|||||||||||||||||||||||||||||
Решение. Применим формулу (6). v A cos(450)=vB cos(300) vB= |
0,707 vA |
=2,449 м/с |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,866 |
|
|
|
|
|
|
|
|
|
Применим формулу (7). Найдём расстояние от точек А и В до МЦВ РАВ по теореме синусов: |
|
|
|
|
|
|
||||||||||||||||||||||||
AP AB= ABsin 600 = 0,866 0,5=0,448 |
BP AB= AB sin 450 |
= 0,707 0,5 =0,366 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
sin 750 |
|
0,966 |
|
3 |
|
|
sin 750 |
0,966 |
|
|
|
|
|
|
|
|
|
||||||||||
v |
|
=ω AP |
|
ω |
|
= |
vA |
= |
=6,696 |
1/с |
v |
|
=ω BP |
|
=6,696 0,366=2,451 м/с |
|
|
|
|
|
|
|
||||||||
|
|
|
AP A B |
0,448 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
A |
AB |
|
AB |
|
|
|
A B |
|
|
|
|
|
B |
|
AB |
AB |
|
|
|
|
|
|
|
|
|
|
|||
|
|
Ответ: 2,45 м/с ; 6,696 1/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Пример 2. Колесо 2 катится по неподвижному колесу 1. Механизм |
|
|
|
|
|
|
|
|||||||||||||||||||||
приводится в действие кривошипом ОА с угловой скоростью 20 1/с. |
|
|
|
|
|
|
|
|||||||||||||||||||||||
Радиусы первого и второго колеса 0,3 и 0,1 м. Найти угловую скорость |
|
|
|
|
|
|
|
|||||||||||||||||||||||
второго колеса. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Решение. Колесо катится без скольжения, поэтому МЦВ – точка |
|
|
|
|
|
|
|
|||||||||||||||||||||
касания колес. Запишем необходимые формулы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Если рассматривать точку А, как часть колеса 2, то |
|
v A=ω2 AP=ω2 r2=0,1 ω2 |
|
|
|
|
|
|
|
|||||||||||||||||||||
Если же рассматривать точку А, как кривошипа ОА, то |
v A=OA ωOA=(r1+ r2) ωOA=0,4 20=8 |
м/с |
||||||||||||||||||||||||||||
Отсюда |
|
|
8 |
|
=80 |
1/c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ω2= 0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ответ: 80 1/с

|
|
ПЛОСКОЕ ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА. УСКОРЕНИЕ |
19 |
|
|||||||||||||||||||||||
Ускорение отдельных точек определяются по следующей общей формуле: |
(8) |
aB=aA+ aAB |
|
|
|||||||||||||||||||||||
Запишем развёрнутую формулу с учётом криволинейного |
|
|
|
|
(9) |
aB=a A+ aAB=anA+aAτ +anAB+ aτAB |
|||||||||||||||||||||
движения точки А и вращательного движения отрезка АВ |
|
|
|
|
|||||||||||||||||||||||
Дальнейшее решение заключается в проектировании равенства (9) на оси координат и решения |
|
|
|||||||||||||||||||||||||
полученной системы уравнений. Для проверки полученного решения можно использовать понятие |
|
||||||||||||||||||||||||||
мгновенного центра ускорений (МЦУ) – точки, ускорение которой в данный момент времени равно |
|||||||||||||||||||||||||||
нулю. Приведём алгоритм поиска МЦУ |
|
|
|
|
|
|
|
(10) tg μ=ε /ω2 |
|
|
А |
anAB |
B |
|
|||||||||||||
|
1) Определить угол поворота μ из соотношения (10) |
|
|
aA |
aABτ |
||||||||||||||||||||||
|
2) Определить направление ускорения выбранной точки. |
|
|
|
|
|
|
|
|
|
aB |
|
|
||||||||||||||
Повернуть этот вектор вокруг этой точки на угол μ в сторону |
|
|
|
|
|
a |
|
|
|
|
|
|
|||||||||||||||
направления углового ускорения ε |
|
|
|
|
|
|
|
|
(11) |
L= |
|
|
|
|
|
D |
|
|
C |
|
|||||||
|
3) Вдоль полученного направления отложить отрезок L, |
(ε2+ω4)1/ 2 |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
длина которого определяется по формуле (11) |
|
|
|
|
|
|
|
|
|
|
|
|
|
1170 А |
180 |
aB |
B |
|
|||||||||
|
Пример. Квадрат АВСD со стороной 2 см совершает плоское |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
движение. В данный момент времени ускорения вершин А и В |
|
|
|
|
Q |
|
|
aA |
|
|
|
|
|
||||||||||||||
равны 2 и 5,657 см/с2 соответственно. Найти угловую скорость и угловое ускорение |
|
|
|
|
|||||||||||||||||||||||
квадрата. |
|
|
|
|
|
|
|
|
|
n |
|
|
|
n |
|
|
|
|
{ |
−a 0,707=0−an |
|
||||||
Решение. Найдём проекции векторов из уравнения |
a |
|
=a |
+ a |
τ |
+a |
|
+a |
τ |
||||||||||||||||||
|
|
|
|
|
|
|
B |
|
|
ABτ |
|||||||||||||||||
|
−5,657 0,707=−ω2 AB=−ω2 2 |
|
|
|
|
B |
|
A |
|
A |
|
AB |
|
|
AB |
−aB 0,707=−aA−a AB |
|
||||||||||
|
|
AB |
AB |
|
ωAB =1,414;ε AB=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
{−5,657 0,707=−2−εAB AB=−2−εAB 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
aA |
|
|
|
|
2 |
|
|
|
|
|
|
|
5,657 |
|
|
|
||||||
|
|
2 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Проверка |
tg μ=εAB / ωAB=1 |
/ 2 μ=26,565 |
|
AQ=(ε2AB +ω4AB )1/ 2 = |
2,236=0,894 |
BQ |
= |
2,236 |
=2,529 |
|
|||||||||||||||||
По теореме синусов из АВQ |
sin180 |
sin 450 |
AQ=0,874 |
|
|
sin1170 |
|
|
sin 450 |
|
|
|
|
|
|||||||||||||
AQ = |
AB |
|
|
|
|
BQ |
|
= |
|
AB |
BQ=2,521 |
|
|
||||||||||||||
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ |
19 |
Точка совершает сложное движение, если она участвует в двух и более движениях. Примеры. Движение лодки по реке; движение человека по эскалатору
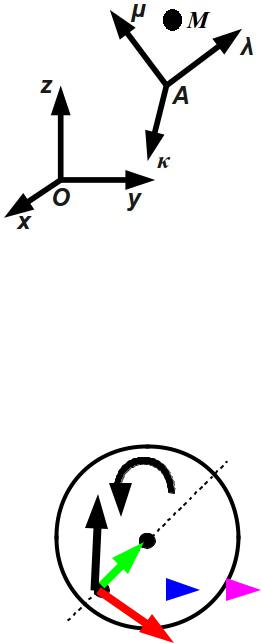
Пусть точка М совершает два движения. Тогда определим две системы координат: неподвижную Охуz и подвижную Аκλμ, относительно которых движется точка М
Относительное движение – движение точки М по отношению к подвижной системе координат Аκλμ
Переносное движение – движение подвижной системы координат Аκλμ по отношению к неподвижной системе координат Oxyz.
Абсолютное движение – движение точки М по отношению к неподвижной системе координат Oxyz.
Кинематические характеристики сложного движения определяются по |
(1) va =v e+ vr |
||||||||||||
двум основным формулам (1) и (2). |
|
|
|
|
(2) aa =ae |
+ar +aK |
|||||||
«e» – переносное движение; «r» – относительное движение; «К» – ускорение Кориолиса |
|||||||||||||
Ускорение Кориолиса возникает в том случае, когда подвижная система |
|
|
|
|
|||||||||
координат совершает вращательное движение вокруг некоторой оси с угловой |
(3) a K =2 (ωe× v r) |
||||||||||||
(4) aK =2 ωe vr sin(ϕ) |
|||||||||||||
скоростью ω ..и определяется по формулам (3) и (4) |
|||||||||||||
e |
|
|
|
|
|
|
|
|
|
|
|
||
Пример. Точка М движется по хорде диска со скоростью 0,5*t м/с. Диск вращается |
|
|
|
|
|
||||||||
со скоростью 0,5 1/с. Определить абсолютные скорость и ускорение в момент |
|
|
|
|
|
||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|||||||||
времени 2 с, если ОМ равно 0,02 м. |
|
|
|
|
|
|
|
|
|
|
|
||
Решение. vr=0,5 2=1 ve=OM ωe=0,02 0,5=0,01 va2=vr2+ve2 +2 ve vr cos(ϕ)= a K |
aen |
||||||||||||
=1+0,0001+0,014=1,0015 va=1,014 |
ar=0,5 aen=OM ω2e=0,02 0,25=0,005 |
450 |
vr |
|
|
||||||||
aK =2ωe vr sin(ϕ)=2 0,5 1 1=1 |
aaX =aen cos(450)+ ar=0,504 |
|
|
|
|
|
|
ar |
|||||
|
|
|
|
|
|
||||||||
aYa =aen sin(450)+ aK =1,004 aa=√ |
(aaX )2+(aYa )2 |
=√ |
|
=1,123 |
|
|
|
|
ve |
||||
0,254+1,007 |
|
|
|
|
|||||||||
РАЗДЕЛ III
ДИНАМИКА ТОЧКИ И ТВЁРДОГО ТЕЛА

ОСНОВНЫЕ ПОНЯТИЯ 20
Динамика – раздел теоретической механики, в котором изучается движение материальных тел в зависимости от действующих на них сил
Закон 1 (инерции). Изолированная от внешних воздействий материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока действие других тел не изменит этого движения.
Инертность – это свойство материальной точки сохранять состояние покоя или равномерного прямолинейного движения, мерой которого является масса [кг].
Движение характеризуется векторной величиной Q, которая называется |
(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Q=m v |
|
|
|
|||||||||||||
количеством движения и определяется равенством (1) |
|
|
|
|
/ |
|
|
|
|
|
|
|
|
||||
Закон 2. Производная по времени от количества движения точки равна |
|
|
|
|
|
|
|
|
|
||||||||
|
m (v) =∑ F k =F |
||||||||||||||||
сумме действующих на точку сил |
|
(2) |
|
|
|
|
|
|
k |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
m a=F ; m a=F |
|||||||||||||
Закон 3. Две материальные точки действуют друг на друга с силами, равными по модулю |
|
|
|
||||||||||||||
и направленными вдоль прямой, которая соединяет эти точки, в противоположные стороны. |
|
|
|
||||||||||||||
Проектируя уравнения (2) на оси координат, получим систему |
(3) |
m x/ /=F 1X +...+ F nX |
|||||||||||||||
дифференциальных уравнений вида (3) |
m y/ /=F 1Y +...+ FYn |
||||||||||||||||
Сформулируем две основные задачи динамики: |
|
{m z |
/ / |
|
|
Z |
Z |
||||||||||
1) на основе закона движения точки определить действующую на нее силу; |
|
=F |
1 +...+ F n |
||||||||||||||
2) зная совокупность действующих на точку сил, определить закон движения точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Пример 1. Найти уравнение движения под действием силы тяжести, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
если v(0) = v0, s(0) = s0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
P =m●g |
|
|
|
|||||||||||
Решение. На тело действует одна сила P = m*g, которая направлена вниз. |
|
|
|
|
|
||||||||||||
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Направим также вниз ось координат(по направлению ускорения). Тогда по формуле (2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
m v/=m g v/ = g v=∫ g dt= g t+ C 1 s/ = g t+ C1 s= |
g t2 |
+ C1 t+ C 2 s= |
g t2 |
+ v0 t+ s0 |
|||||||||||||
|
|
||||||||||||||||
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||

ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ |
21 |
||
Существуют две меры воздействия силы на точку: импульс и работа |
|
||
Элементарный импульс dp силы F за промежуток времени dt вычисляется по формуле |
|
||
|
[dp]=H c= |
кг м |
|
|
|
||
(1) dp=F dt |
с |
|
|
|
|
|
|
Полный импульс p силы F за промежуток времени от t1 до t2 вычисляется по формуле
t2
(2)p=∫ F dt
t1
Теорема 1. Изменение количества движения точки Q за некоторый промежуток времени равно сумме
импульсов Sk всех сил, которые действуют на точку за этот же промежуток времени и вычисляется по |
|||||
формуле (3). |
|
|
|
|
|
(3) m v2−m v1=∑ pk = p |
|
|
L |
||
Момент количества движения (кинетический момент) точки М – это векторная |
|
|
|||
|
|
|
|||
|
|
|
|||
величина L, которая определяется по формуле (4) |
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|||
(4) L= r |
×m v= r |
×Q |
|
|
O |
|
|
||||
Вычислим длину вектора L для важного частного случая движения по окружности с |
M |
||||
центром в точке О L=r (m v) sin(900)=r m ω r=ω m r2=ω IO |
|
|
Q |
||
Момент инерции точки М с массой m относительно точки О это скалярная величина, которая определяется по формуле (5) и является мерой инертности тела при вращательном движении
(5) IO=m r2
Теорема 2. Производная по времени от кинетического момента LO, |
|
|
|
взятого относительно некоторой точки О, равна моменту действующей на |
(6) |
d L |
|
точку равнодействующей R всех сил относительно той же точки O |
dt |
=M O(R) |
|
|
|
ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ |
22 |
Элементарная работа силы F при перемещении точки М на бесконечно малое расстояние dS определяется по формуле (7).
На произвольном перемещении от точки М0 до точки М1 по формуле (8)
(7)dA=F dS=
=F x dx+F y dy+F z dz
Работа силы тяжести P = m*g |
(9) AP=±P h=P (z0 |
−z1) |
M 0 |
|
M 0 |
|
||
|
|
|
|
|||||
|
|
|
x |
|
1 |
|
|
|
Работа силы упругости Fx |
= – k*x, Fy = Fz = 0 (10) AУ =−k ∫1 |
x dx= |
k ( x02 |
−x12) |
||||
2 |
||||||||
|
(11) |
ATP=−FTP S |
x0 |
|
|
|
||
Работа силы трения F |
|
|
|
|
|
|||
TP |
|
|
|
|
|
|
|
|
z0 , z1 – начальная и конечная аппликата точки М; x0 , x1 – начальная и конечная деформация пружины; S – длина отрезка перемещения точки М.
Если под действием силы F или пары сил с моментом МО точка |
(12) dA=MO d φ |
||||||
|
φ1 |
|
|
|
|||
перемещается вдоль окружности радиуса R с центром в точке О на |
(13) |
A=∫ M O (φ )d φ |
|||||
бесконечно малый угол dφ, то работа этой силы или пары сил |
|
φ 0 |
|
|
|
||
определяется по формуле (12); если же поворот производится на |
(14) A=MO (φ1−φ 0) |
||||||
конечный угол, то работа определяется по формулам (13) и (14) |
|
|
m v2 |
|
|
||
Кинетическая энергия точки Е – это скалярная величина, которая |
(15) |
E= |
|
|
|||
|
|||||||
|
|
|
2 |
|
|
||
при поступательном движении определяется по формуле (15), а при |
(16) |
|
ω2 IO |
||||
криволинейном по окружности – по формуле (16) |
E= |
|
|
|
|
||
|
2 |
|
|
||||
|
|
|
|
|
|
||
Теорема 3. Изменение кинетической энергии точки при некотором |
(17) |
E II −E I=∑ Ak |
|||||
её перемещении равно сумме работ всех сил, которые действуют на |
|||||||
точку во время этого перемещения. |
|
|
|
|
|
k |
|
|
|
|
|
|
|
||

|
|
ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ. ПРИМЕРЫ |
23 |
|||||||
|
Пример 1. Поезд движется по горизонтальному и прямолинейному |
|||||||||
участку пути. При торможении развилась сила сопротивления, равная 0,1 |
|
|||||||||
веса поезда. В момент начала торможения скорость поезда равнялась 20 |
|
|||||||||
м/с. Найти время торможения и тормозной путь. t |
t |
|
||||||||
Решение. FTP =−0,1 P=−0,1 m g=−m pTP=∫F TP dt=−m ∫dt=−m t |
|
|||||||||
m v1−m v0=−20 m |
|
|
|
0 |
0 |
|
|
|
||
Тогда время торможения определится из равенства −m tTOP=−20 m tTOP=20 |
||||||||||
Так как на тело действует постоянная сила торможения, то поезд движется с постоянным ускорением |
||||||||||
a= |
FTP |
=−1 Тогда s= |
a t2 |
+v0 t + s0=− |
t2 |
+20 t |
|
t2 |
|
|
|
|
|
Откуда sTOP=− |
TOP |
+20 tTOP=200 |
|
||||
m |
2 |
2 |
|
|||||||
|
|
|||||||||
|
|
|
|
2 |
|
|
||||
Пример 2. Определить работу, которую надо затратить, чтобы поднять на 5 м
тело массы 20 кг, двигая его по наклонной плоскости под углом в 300. Коэффициент трения 0,5. Найти силу, которую надо приложить, чтобы тело увеличило скорость с 0 до 3 м/с.
Решение. На тело действуют три силы: сила тяжести Р, сила реакции опоры N; сила трения FТР . Для
того, чтобы тело начало перемещаться, надо приложить силу, работа которой равна работе всех трёх указанных сил. Так как сила N перпендикулярна S, то эта сила не совершает работу. Тогда для оставшихся сил получим P=m g=200 FTP =0,5 N =0,5 P cosα=0,5 m g cos(300)=86,6
Работа сил на перемещении S = 10 м равна ATP=−FTP S=−866 AP=−P h=−200 5=−1000
Тогда A = – 1866 Дж |
|
|
|
|
|
|
E II −E I=∑ Ak |
||
Для решение второй задачи применим теорему об изменении кинетической энергии |
|||||||||
E II = |
m v22 |
=20 9=90 |
E I= |
m v12 |
= |
20 0 |
=0 |
∑ Ak =−1866+T S=10 T −1866 |
k |
|
|
2 |
|
||||||
2 |
2 |
2 |
|
|
k |
|
|||
Тогда 90=10 T −1866 T =195,6 |
Н |
|
|
|
|
||||
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ ТОЧКИ |
24 |
||||||
Существуют два основных вида колебаний точки: 1) СВОБОДНЫЕ; 2) ВЫНУЖДЕННЫЕ |
|
||||||
1) СВОБОДНЫЕ КОЛЕБАНИЯ – это колебания, которые происходят под действием |
|
||||||
внутренних сил, например, восстанавливающей силы пружины. |
|
|
|
||||
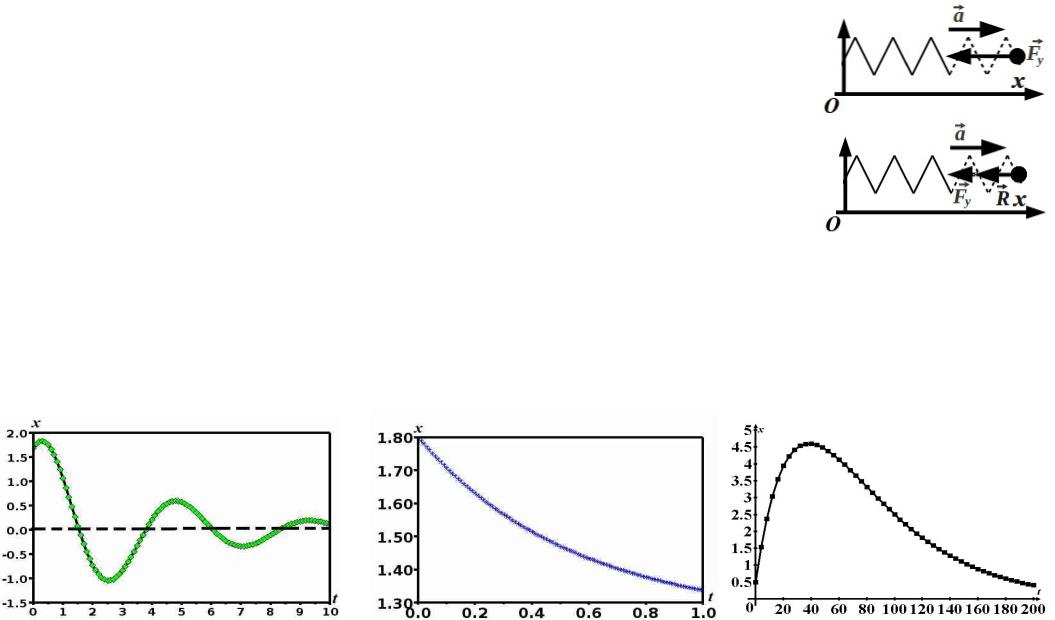
а) Не вязкая среда Второй закон Ньютона |
m x |
/ / |
|
Закон Гука |
F У =−k x |
|
|
|
|
||||||
|
|
|
= FУ |
|
|
||
Дифференциальное уравнение (1) |
m x/ / + k x=0 x/ / +λ2 x=0 |
|
|
||||
и его решение (2) x=C sin(λ t )+C cos(λ t )= A sin(λ t +α) |
|
|
|||||
1 |
2 |
|
|
|
|
|
|
А — амплитуда колебаний; λ — частота колебаний; α — начальная фаза колебаний
б) Вязкая среда Если точка М перемещается в вязкой R=−μ v =−μ x/ среде, то на неё действует сила, которая пропорциональна скорости перемещения:
Дифференциальное уравнение |
(3) |
m x/ /+ k x +μ x/=0 x/ / +2 b x/ + λ2 x=0 |
|
и его решения |
(4) |
λ > b: x=e−b t A sin( p t +α) |
|
p2=λ2− b2 r2= b2−λ2 |
(5) |
λ < b: x=C 1 e−( b+ r) t +C 2 e−(b−r) t |
|
|
(6) |
λ=b: x=e−b t [C |
+C t ] |
|
|
1 |
2 |