

Рабочие механизмы драглайна
Рабочие и холостые движения экскаватора осуществляются, приводимыми от двигателя или группы двигателей, отдельными механизмами или группой механизмов.
Главные механизмы служат для получения рабочих движений ковша экскаватора: подъема (и тяги у драглайна) и напора. Доставку ковша к месту разгрузки производят механизмом поворота. Все эти механизмы устанавливают на поворотной платформе (за исключением механизма напора у карьерных лопат с зубчато-реечной системой выдвижения рукояти, находящейся, как правило, на стреле.
По кинематическому признаку механизмы экскаватора подразделяются на три типа:
• с однодвигательной схемой привода всех механизмов от одного общего двигателя;
• с групповой схемой привода нескольких механизмов от общих двигателей;
• с многодвигательной схемой привода механизмов от собственных (индивидуальных) двигателей.
Первые два типа применялись на экскаваторах малой мощности – универсальных, которые здесь не рассматриваются. Механизмы экскаваторов средней и большой мощности имеют индивидуальный привод постоянного тока с одним или несколькими двигателями.
Механизмы подъема и тяги одноковшовых экскаваторов (за исключением гидравлических) состоят из приводных лебедок и канатно-блочных передач. Схемы канатно-блочных передач у экскаваторов с индивидуальным приводом обычно выполняют бесполиспастными. При двух или четырехканатном подъеме на ковше мехлопат иногда применяют двукратный полиспаст или уравнительные блоки, выравнивающие натяжение отдельных ветвей канатов. На драглайнах полиспастные системы на подъеме и тяге не применяют. Подъемные лебедки экскаваторов подразделяют по числу двигателей барабанов и редукторов. По числу двигателей подъемные лебедки бывают однодвигательными РКГ-5А, ЭВГ-35.65М), двухдвигательными (ЭКГ-10, ЭКГ-15, ЭКГ-20, ЭШ 65.45М, ЭШ 11.70, ЭШ 15.90 и др.) и многодвигательными – с четырьмя (ЭШ 40.85, ЭШ 100.100) и более двигателями. На некоторых зарубежных драглайнах число двигателей в приводах подъемных лебедок достигает десяти.
По числу барабанов подъемные (тяговые) лебедки экскаваторов подразделяют на одно и двухбарабанные (сдвоенные).
Подъемные лебедки экскаваторов выполняются двух видов: безредукторные (ЭВГ-35.65М) и редукторные. Последние, в свою очередь, могут быть одноредукторными (ЭКГ-5А, ЭКГ-10, ЭКГ-20 и ЭШ 15.90), двухредукторнымй (ЭШ 25.100) и многоредукторными – с четырьмя (ЭШ 100.100) и более редукторами.
Подъемные и тяговые лебедки у шагающих экскаваторов, а также подъемные и напорные у большинства карьерных и вскрышных в наибольшей степени характеризуются блочностью и унификацией конструкций. Под блочными понимают такие конструкции машин или их механизмов, которые состоят из отдельных узлов (редукторов, барабанов, лебедок, тормозов, аппаратов и др.), соединенных с остальной конструкцией машины с помощью легкоразъемных соединений.
Унифицированными называют такие конструкции машин, у которых разнотипность деталей и узлов одного и того же назначения сведена до минимума. Блочность и унификация конструкций в значительной степени облегчают и упрощают конструирование, изготовление и эксплуатацию (ремонт) таких машин. Так, применение унифицированных стандартных узлов (модулей) для подъемных и тяговых лебедок, например драглайнов, позволяет получать типовой унифицированный ряд лебедок (рис. 8) с разнообразными комбинациями идентичных передач и двигателей, используемых как базовые для исходной (простейшей) модели параметрического ряда.
Рис. 8. Унифицированный ряд подъемных и тяговых лебедок, скомпонованных из стандартных модулей: 1 – двигатель; 2 – зубчатая передача; 3 – барабан
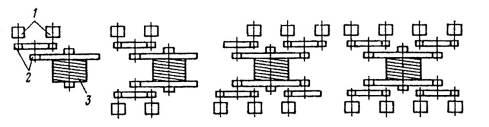
Использование стандартных блоков зубчатых передач в различных комбинациях дает определенные преимущества по сравнению с индивидуальным методом проектирования редукторов, главными из которых являются: высокая надежность уже отработанных систем, взаимозаменяемость, ремонтопригодность и малая номенклатура запасных частей. Подъемная и тяговая лебедки на отечественных драглайнах кинематические и конструктивно унифицированы (рис. 9). Расчеты показывают, что предпочтительным является превышение мощности подъемной лебедки на 15–20 % по сравнению с мощностью тяговой. При установке для привода лебедки малого числа двигателей большой единичной мощности этого достичь трудно. При использовании же схем компоновки лебедок из стандартных модулей (см. рис. 8) возможно оснастить подъемную лебедку большим числом двигателей, чем тяговую.
Рис. 9. Кинематическая схема подъемной и тяговой лебедок драглайна ЭШ 15.90:
1 – кулачковая муфта с тормозным шкивом; 2 – шевронная пара; 3 – цилиндрическая пара; 4 – барабан; 5 – зубчатая муфта; 6 – пневмоцилиндр управления зубчатой муфтой

У мощных драглайнов размещение механизмов на платформе характеризуется большим разнообразием. Тем не менее подъемные и тяговые лебедки, как наиболее тяжелое оборудование, устанавливают в хвостовой части платформы, а преобразовательные агрегаты, как относительно более легкие узлы, либо переносят в переднюю часть платформы, либо устанавливают рядом с подъемной лебедкой (ЭШ 100.100 и др.).
Сравнительно большая площадь поворотных платформ шагающих экскаваторов позволяет более рационально разместить на ней все механизмы, в том числе и механизмы поворота, число которых на самых крупных экскаваторах составляет 10–12.
На рис. 9 а показано расположение механизмов на поворотной платформе драглайнов ЭШП.70 и ЭШ 14.50 (НКМЗ), имеющих шагающее устройство механического типа. На такого типа экскаваторах тяговую 1 и подъемную 2 лебедки устанавливают между центральной цапфой и четырехмашинным агрегатом 3. В центре поворотной платформы находится привод 4 кривошипно-шатунного механизма шагания, состоящий из трехступенчатого редуктора 5, раздаточных валов 6, открытых бортовых передач 7 и валов с эксцентриками 8, вращающимися в установленных на раме платформы подшипниках 9. В центре передней части платформы расположены два поворотных механизма 10, а слева – кабина 11 машиниста. В машинном зале размещены пневмосистема 12 и система смазки 13. На передней балке поворотной платформы расположены блоки наводки 14 тяговых канатов. Аналогичную компоновку механизмов на поворотной платформе имеют также, экскаваторы НКМЗ ЭШ 20.65 и ЭШ 15.80.
На мощных драглайнах УЗТМ принята схема размещения оборудования на поворотной платформе, характерная для драглайна ЭШ 100.100 (рис. 10.б)
Рис. 10. Размещение механизмов на поворотной платформе драглайнов: а – ЭШ ПЛОА и ЭШ 14.50; б – ЭШ 100.100

Подъемная 1 и тяговая 2 лебедки имеющие по четыре двигателя мощностью по 2550 кВт каждый с частотой вращения ротора п = 4,16 с-1 смещены назад за ось вращения платформы. Сбоку от лебедок расположены баки гидросистемы 7, компрессорные станции и трансформаторы, а также четыре четырехмашинным агрегата, в состав каждого из которых входят синхронный двигатель 3 и три генератора – подъема 4, тяги 5 и поворота 6. Впереди платформы полукругом устанавливают восемь поворотных механизмов 8, приводимых в движение двигателями мощностью по 1000 кВт (п = 0,5 с-1).
Кабина управления 9 драглайном находится справа от продольной оси платформы между опорами стрелы.
От электродвигателей через эластичные муфты вращение передается четырем шевронным редукторам, выходные цилиндрические прямозубые шестерни которых попарно входят в зацепление с бортовыми зубчатыми венцами двухбарабанной лебедки диаметром 3,4 м и длиной 8 м. Барабан не имеет сквозной оси и опирается на две короткие полуоси, запрессованные в ступицы зубчатых венцов. На каждую половину барабана наматываются по два каната диаметром по 90 мм с разрывным усилием 6 МН каждый.
Нормально замкнутые пружинные тормоза колодочного типа, размыкаемые пневмоцилиндрами, в состоянии удержать груженый ковш массой 300 т в любой точке его траектории. Во время работы осуществляется электрическое торможение ковша электродвигателями. Общая масса лебедки (без электрооборудования) 520 т.
Аналогично располагается оборудование на поворотных платформах экскаваторов ЭШ 40.85, ЭШ 20.90 и их модификаций.
На современных драглайнах УЗТМ подъемная лебедка обычно устанавливается за тяговой (от оси вращения). При этом подъемные канаты идут непосредственно на верхние блоки надстройки платформы и далее на головные блоки стрелы, а тяговые по наклонным направляющим на блоки наводки, расположенные посредине и у основания вертикальной стойки надстройки, и далее к ковшу. Поворотные платформы мощных вскрышных лопат и драглайнов, а также опорные рамы последних представляют собой сложные металлоконструкции, составляемые из секций, число которых может достигать 50. Секции свариваются или свинчиваются чистыми болтами на месте монтажа.
Поворотные платформы шагающих экскаваторов служат опорой для механизма шагания. Через роликовый круг платформа опирается на базу и соединяется с ней центральной цапфой.
Кузов экскаватора представляет собой панельную стальную конструкцию. У мощных экскаваторов внутри кузова устанавливаются один-два мостовых крана (например, на экскаваторе ЭШ 100.100 два крана грузоподъемностью 75 т каждый), используемые при монтажных и ремонтных работах. В задней стенке кузова имеются ворота, а в полу-люки, через которые краном извлекаются механизмы, направляемые в ремонт.