

Драглайн.
Наиболее характерными представителями выемочно-погрузочных машин, эксплуатируемых на открытых разработках, являются одноковшовые и многоковшовые экскаваторы.
Экскаватором называется машина, предназначенная для черпания (экскавации) горной массы, перемещения ее на относительно небольшие расстояния и погрузки на транспортные средства или в отвал.
Рабочий цикл одноковшового экскаватора складывается из четырех последовательных операций: наполнения ковша (черпания), перемещения его к месту разгрузки (транспортирования), разгрузки и перемещения порожнего ковша к месту черпания для воспроизведения нового цикла. Поэтому одноковшовые экскаваторы являются машинами цикличного (прерывного) действия. В отличие от них многоковшовые экскаваторы, у которых все элементы рабочего цикла осуществляются одновременно (совмещено), являются машинами непрерывного действия.
Существующие типы экскаваторов в общем виде классифицируются типажом по следующим признакам: назначению и роду выполняемой работы; вместимости ковша (Е, м3 – одноковшовые) или теоретической производительности (Q м3/ч – многоковшовые); видам рабочего, ходового и силового оборудования. В свою очередь одноковшовые экскаваторы подразделяются на лопаты: карьерные прямые напорные механические гусеничные (ЭКГ), прямые гидравлические (ЭГ) и обратные гидравлические (ЭГО), прямые вскрышные гусеничные (ЭВГ) и на драглайны – шагающие (ЭШ) и гусеничные (ЭДГ). Карьерно-строительные лопаты (преимущественно гидравлические) маркируются как ЭО.
Многоковшовые экскаваторы подразделяются на: роторные гусеничные – вскрышные (ЭР или ЭРГ), вскрышные на шагающе-рельсовом ходу (ЭРШР), добычные гусеничные (ЭРП или ЭР-Д), добычные на шагающее-рельсовом ходу (ЭРШР-Д) и на цепные гусеничные (ERs) или на рельсовом ходу (Es). Кроме упомянутых больших классов экскаваторов имеются и некоторые мало распространенные разновидности экскаваторов, например прямые лопаты с рабочим оборудованием типа «Суперфронт» и с рабочим оборудованием фрезерного типа (барабан с зубками).
Силовое оборудование мощных экскаваторов преимущественно электрическое, на машинах среднего класса и малой мощности применяются также дизель-электрические и дизель-гидравлические и электрогидравлические приводы.
В свою очередь, одноковшовые и многоковшовые экскаваторы имеют более узкие классификации, отвечающие конкретной специфике конструкций той или иной группы машин, которые будут рассмотрены ниже, в соответствующих разделах.
Любой экскаватор, одноковшовый или многоковшовый, состоит из рабочего (у одноковшовых экскаваторов оно же и транспортирующее), транспортирующего, механического, включающего главным образом передаточные механизмы (трансмиссии), ходового и силового оборудования, а также механизмов управления, металлоконструкций платформы и надстройки, кузова.
Конструктивные схемы драглайнов
Конструктивной схемой, в отличие от кинематической, называют схематическое изображение всей машины или ее основных узлов с указанием их действительного взаимного расположения и кинематической связи.
Одним из главных признаков различия одноковшовых экскаваторов, определяющих их назначение и область применения, является рабочее оборудование. В зависимости от назначения рабочее оборудование одноковшовых экскаваторов имеет различную конструкцию и кинематику. На универсальных экскаваторах могут применяться до десяти видов сменного рабочего оборудования. Однако экскаваторы, используемые на открытых горных разработках, имеют, как правило, один основной вид специализированного рабочего оборудования.
Основные виды рабочего оборудования одноковшовых экскаваторов, применяемого на открытых работах, – прямая напорная лопата, драглайн, гидравлические прямые и обратные лопаты и ковшовые погрузчики.
Известны четыре вида рабочего оборудования прямой напорной лопаты: прямая с выдвижной рукоятью, коленно-рычажная, рычажная типа «Суперфронт» и гидравлическая. Напорная лопата имеет систему принудительной подачи рукояти и ковша в забой, действующую от какого-либо привода.
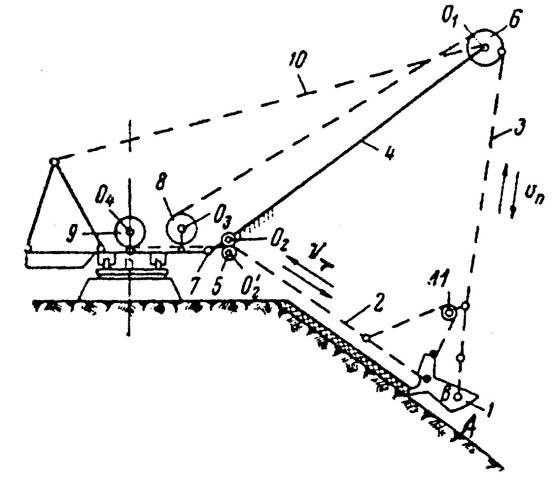
Драглайн (рис. 1) имеет ковш 1 с упряжью, тяговый 2 и подъемный 3 канаты, стрелу 4 с направляющими 5, головными 6 блоками и пятой 7. Для перемещения ковша служат лебедки подъема и тяги. Угол наклона стрелы определяется длиной поддерживающего стрелу каната или полиспаста 10.
Исполнительный механизм драглайна имеет два гибких звена-каната, связывающих ковш с ведущими звеньями механизма. Неподвижным звеном механизма драглайна является платформа экскаватора с двуногой стойкой и стрелой. Подъемный 8 и тяговый 9 барабаны лебедок образуют с неподвижными звеньями в точках О2, О3, О4 или О1, О3 и О4 вращательные пары. Механизм воспроизводит рабочие движения драглайна в результате перемещений подъемного и тягового канатов.
Разгрузка ковша осуществляется за счет ослабления тягового каната и поворота ковша, имеющего центр тяжести впереди точки А крепления вертикальной подвески. При этом канат упряжи проскальзывает относительно блока 11, давая возможность ковшу опрокинуться.
Рабочее оборудование приспособлено к разработке грунта преимущественно ниже уровня стояния экскаватора, хотя вполне успешно может работать и выше этого уровня.
Рис. 1. Конструктивная схема экскаватора драглайна
|
Показатели |
680w |
7820w |
w2000 |
8050 |
8200 |
8750 |
2570ws |
|
Вместимость ковша, м3 |
12–24 |
21–2 |
24–34 |
43–71 |
51–88 |
84–126 |
88–138 |
|
Длина стрелы, м |
58–90 |
69–99 |
75–101 |
84 – 108 |
84 – 122 |
102–131 |
110–128 |
|
Максимальная нагрузка на подъемный канат, кг |
36 300 – 70300
|
82000 – 111000
|
70300 – 102000
|
134000 – 145000
|
159000 – 249000
|
250000 – 340000
|
254000 – 362900
|
|
Максимальная эксплуатационная масса, кг |
1043 000 |
1996000
|
1780 000 |
3629 000
|
4492 000
|
6580 000
|
7271 000
|
|
Параметры |
ЭШ 11.75 |
ЭШ 20.90 |
ЭШ 25.100 |
ЭШ 40.100 |
ЭШ 65.100 |
ЭШ 100.125 |
|
Вместимость ковша, м3 |
11
|
20
|
25
|
40
|
65
|
100
|
|
Длина стрелы, м |
75 |
90 |
100 |
100 |
100 |
125 |
|
Угол наклона стрелы, |
30 |
32 |
34 |
32 |
32 |
35 |
|
градус |
|
|
|
|
|
|
|
Концевая нагрузка, кН |
330
|
630
|
770
|
1250
|
2050
|
3000
|
|
Время цикла, с |
54 |
60 |
60 |
60 |
60 |
60 |
|
Высота выгрузки, м |
30,2 |
28,5 |
39 |
40 |
38,5 |
56 |
|
Радиус выгрузки, м |
71,4 |
83 |
83,5 |
94,8 |
97,6 |
118 |
|
Глубина копания, м |
38 |
42,5 |
42,5 |
47 |
46 |
52 |
|
Диаметр базы, м |
10,8 |
14,5 |
15,3 |
18 |
23,5 |
27 |
|
Давление на грунт, |
0,087 |
0,105 |
0,103 |
0,135 |
0,125 |
0,18 |
|
МПа |
|
|
|
|
|
|
|
Мощность сетевого |
1250 |
2500/ |
2500/ |
2x2250 |
4x2250 |
4x3600 |
|
двигателя, кВт |
|
2250 |
2250 |
|
|
|
|
Рабочая масса, т |
840 |
1740 |
1900 |
3320 |
5460 |
10000 |