

5. Приведение статических моментов и моментов инерции к валу двигателя
При составлении расчетной схемы механической части электропривода
моменты сопротивления движению РО (статические моменты) и моменты
инерции приводятся к валу двигателя.
Критерием приведения моментов к валу двигателя является энергетический баланс механической части электропривода. Статические и динамические моменты на валу рабочей машины приведены в таблице 5
Выбран редуктор с передаточным числом iР=40 и коэффициентом полезного
действия ηР=0.97
Статический момент рабочей машины, приведенный к валу двигателя, без учета потерь в редукторе (ηР= 1), рассчитывается по формуле:
 ;
(12)
;
(12)
Статические моменты на валу с учетом потерь в редукторе (ηР < 1) рассчитываются в зависимости от режима работы электропривода.
Статический момент на валу в двигательном режиме
 ; (13)
; (13)
При работе электропривода в тормозных режимах потери в редукторе
вызывают уменьшение нагрузки двигателя, при этом моменты на валу определяются по формуле:
![]() ;(14)
;(14)
 Приведённые
моменты к валу двигателя рассчитываются
приближенно, принимая в расчетах
номинальное значение коэффициента
полезного действия редуктора ηР.
Приведённые
моменты к валу двигателя рассчитываются
приближенно, принимая в расчетах
номинальное значение коэффициента
полезного действия редуктора ηР.
При уточненных расчетах установившихся и переходных режимов
работы электропривода
необходимо также учитывать момент
потерь холостого хода (момент постоянных
потерь) двигателя ![]() .
.
В двигательном режиме работы двигателя статический момент
увеличивается на величину момента потерь холостого хода
![]() покрывается
за счет электромагнитного момента
двигателя:
покрывается
за счет электромагнитного момента
двигателя:
При работе двигателя в тормозном режиме статический момент
уменьшается на величину момента потерь холостого хода
(![]() покрывается
за счет статического момента рабочего
органа).
покрывается
за счет статического момента рабочего
органа).
Таким образом, приведенные статические моменты системы
электропривод – рабочая машина рассчитывают для каждого участка с
учетом режима работы электропривода по формуле :
МС
= МВС
± ![]() , (15)
, (15)
где
![]() рассчитывается по формуле:
рассчитывается по формуле:
При этом в статическом моменте учитываются не только силы сопротивления движению в рабочей машине, но также и потери в редукторе и механические потери в двигателе.
Суммарный приведенный к валу двигателя момент инерции системы может быть рассчитан по соотношению:
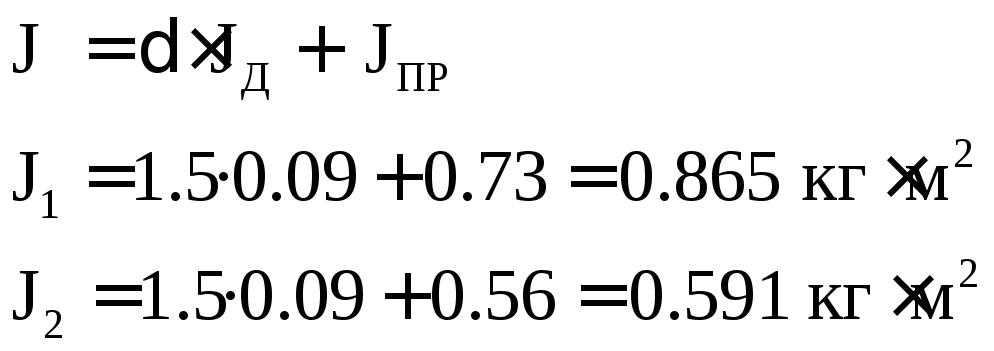 ,
(16)
,
(16)
где JД – момент инерции ротора двигателя;
![]() –коэффициент,
учитывающий момент инерции остальных
элементов
–коэффициент,
учитывающий момент инерции остальных
элементов
электропривода: муфт, тормозного шкива, редуктора и др.;
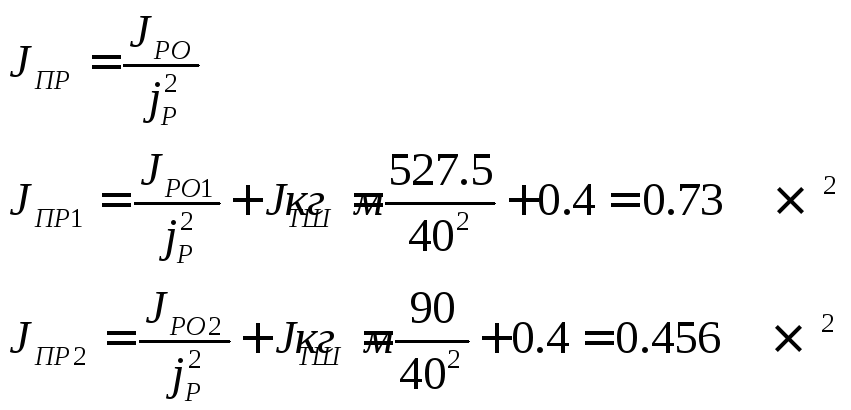 (17) – приведенный
к валу двигателя суммарный момент
инерции движущихся исполнительных
органов рабочей машины и связанных с
ними движущихся масс (грузов, заготовок
и т.п.).
(17) – приведенный
к валу двигателя суммарный момент
инерции движущихся исполнительных
органов рабочей машины и связанных с
ними движущихся масс (грузов, заготовок
и т.п.).
В данном проекте
допускается рассчитывать момент инерции
передачи приближенно, принимая в формуле
(16) коэффициент ![]() =
1.3…1,5
=
1.3…1,5
 Для
учёта влияние упругостей в механизме
указана крутильная жесткость СК.
Для
учёта влияние упругостей в механизме
указана крутильная жесткость СК.
Приведенную к валу двигателя жесткость упругой механической связи СПР
определяют через значение крутильной жесткости рабочего вала (упругой муфты) по формуле:
![]() МН*м/рад (18)
МН*м/рад (18)
Также в Таблицу 5
записывается установившаяся скорость
![]()
Таблица 5
|
Участок движения |
Рабочий ход |
Обратный ход | |||||||||
|
Расчётные данные |
Обозначения |
Пуск |
Уст. Реж. |
Тормож. |
Пуск |
Уст. Реж. |
Тормож. | ||||
|
По данным Таблицы 2 | |||||||||||
|
Скорость РО, м/с |
vРО |
0,25 |
0,5 |
0,25 |
0,5 |
0,75 |
0,5 | ||||
|
Момент статический РО, кНм |
Мрост |
703.627 |
274.586 | ||||||||
|
Момент инерции РО, кг·м2 |
JРО |
527.5 |
90 | ||||||||
|
Приведение к валу двигателя (i=40, КПД=0.97) | |||||||||||
|
Скорость двигателя |
|
- |
80 |
- |
- |
120 |
- | ||||
|
Момент статический на валу |
|
|
| ||||||||
|
без учёта потерь в передаче, Нм |
Мпр
( |
17.591 |
6.865 | ||||||||
|
с учётом КПД редуктора, Нм |
Мвс
( |
18.135 |
6.659 | ||||||||
|
с учётом механических потерь, Нм |
Мс |
20.47 |
4.323 | ||||||||
|
Приведённый момент инерции |
Jпр |
0.73 |
0.456 | ||||||||
|
Момент инерции электропривода |
J |
0.865 |
0.591 | ||||||||
|
Динамический момент, Нм |
Мдин |
138.35 |
94.6 | ||||||||
|
Момент двигателя, допуск. по ускор. |
Мдопуск |
45.604 | |||||||||
|
Данные предварительного Расчёта | |||||||||||
|
Момент двигателя средний на участке, Нм |
Мср |
39.743 | |||||||||
|
Время работы, с |
t |
0.5 |
13.5 |
0.5 |
0.75 |
8.583 |
0.75 | ||||
|
Угол поворота вала двигателя, рад/с |
α
|
20 |
1055 |
45 |
20 |
1055 |
45 | ||||
В таблицу, в строку МДОП.УСК, необходимо включить также требуемые пусковые МП и тормозные МТ моменты двигателя, при которых обеспечивается возможность разгона и торможения электропривода с заданным допустимым ускорением:
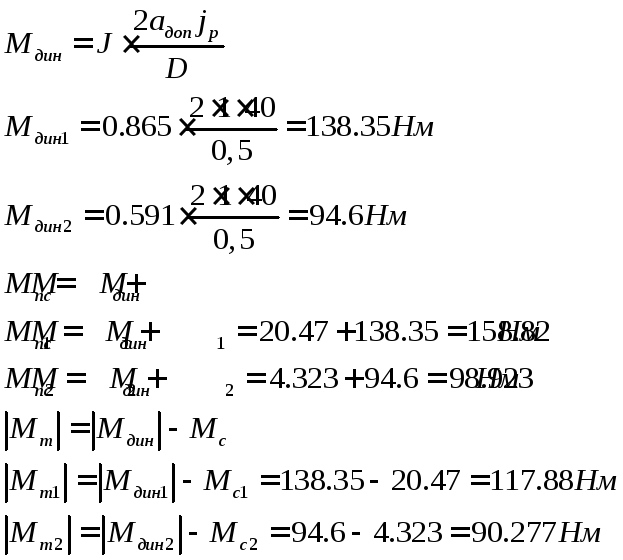 (19)
(19)
Если момент Мдоп. уск. больше максимального допустимого момента двигателя, то ускорение приходится снижать, что повлечет за собой уменьшение производительности рабочей машины, или выбирать двигатель большей мощности, обеспечивающий требуемое ускорение электропривода.
В данном случае, Мдоп. уск. < Mmax: 45.604 Нм < 155 Нм