

2.1 Нагрузочные диаграммы скорости ро
На базе исходных данных рабочей машины рассчитаем и построим зависимости скорости рабочей машины от времени v(t). Участки различаются значениями скоростей, статических нагрузок и моментов инерции. На основе заданных путей перемещения L, установившейся скорости vу и среднего допустимого ускорения aдоп рассчитывают:
– время пуска tп
до установившейся
скорости с допустимым ускорением,
торможения tт
от установившейся
скорости до остановки :
:
![]()
![]() ;
(1)
;
(1)
– путь, проходимый за время пуска (торможения) рабочей машиной,
![]() ;
(2)
;
(2)
– время установившегося режима движения со скоростью vy:
![]() .
(3)
.
(3)
Результаты занесены в таблицу 2 и по ним построена диаграмма скорости v(t)
Полученная зависимость v(t) представляют собой графическое задание на проектирование электропривода и на завершающем этапе проектирования позволят оценить качество выполнения технологических требований. Кроме того, она используются для построения графиков статических и динамических моментов рабочей машины.
2.2 Нагрузочные диаграммы моментов ро
 Рассчитаем
моменты для нашего механизма:
Рассчитаем
моменты для нашего механизма:
Статические моменты сопротивления движению в цепном транспортёре создаётся силами трения.
Статический момент на каждом участке определяется суммой всех составляющих Мросm = Σ М.
В данном случае движению заготовки мешает трение скольжение и трение скольжения по направляющим:
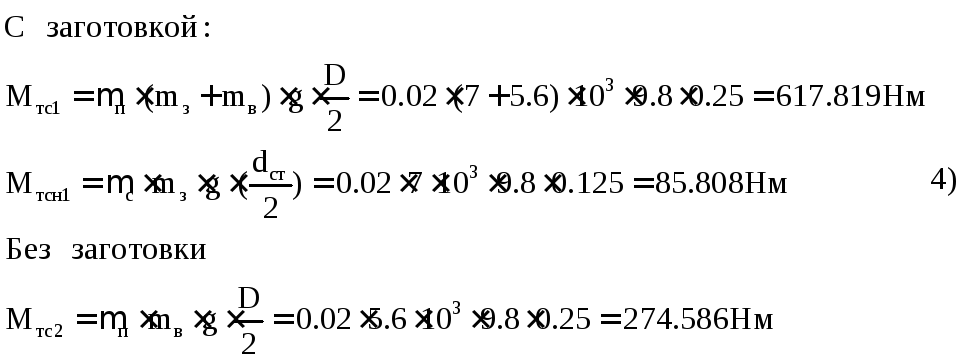
Тогда,
 5)
5)
Динамические моменты обеспечивают возможность способность движущимися массами рабочего органа запасать (и выделять) кинетическую энергию.
Для определения динамических моментов рабочей машины рассчитываются моменты инерции рабочей машины (рабочего органа):
![]() (6)
(6)
где J1 – моменты инерции вращающихся элементов рабочей машины, кгм2;
m1 – масса поступательно движущихся частей, кг;
D – диаметр колеса (барабана, звездочки, шкива и т.п.), находящегося на выходном валу редуктора и преобразующего вращение вала в поступательное движение рабочей машины, м.
В данном механизме Jро принимает разные значения: при движении с заготовкой и без, поэтому JРО определяется следующим образом:

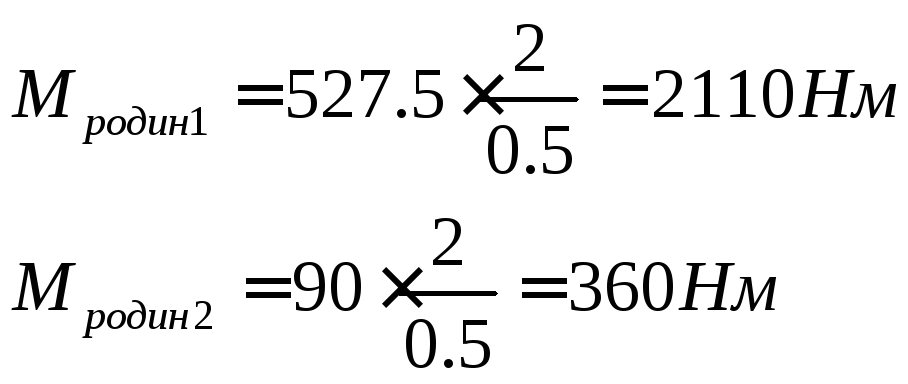
При заданной величине допустимого ускорения aдоп для каждого режима рабочей машины определяются динамические моменты
![]() (7)
(7)
 Полный
момент рабочей
машины:
Полный
момент рабочей
машины:
 (8)
(8)
Знаки полного момента и его составляющих зависят от направления движения и режима работы (пуск, торможения).
Результаты расчетов скоростей и моментов для каждого участка движения занесены в табл. 2.
По результатам расчетов с учетом времени пуска, торможения, установившегося движения на рисунке 2. строят нагрузочную диаграмму моментов рабочего органа для каждого режима работы МРО(t).
Таблица 2.
|
Участок движения |
Рабочий ход |
Обратный ход | |||||||
|
Расчётные данные |
Обозначения |
Пуск |
Уст.Режим |
Тормож. |
Пуск |
Уст.Режим |
Тормож. | ||
|
Скорость, м/с |
vРО
|
0.25 |
0.5 |
0.25 |
0.5 |
0.75 |
0.5 | ||
|
Время работы, с |
tРО
|
0.5 |
13.5 |
0.5 |
0.75 |
8.33 |
0.75 | ||
|
Путь,м |
LРО
|
0.125 |
6.75 |
0.125 |
0.375 |
6.25 |
0.375 | ||
|
Моменты РО, Нм |
|
|
| ||||||
|
Трения скольжения |
Мтс
|
617.819 |
274.586 | ||||||
|
Трение скольжения по направляющим |
Мтк |
85.808 |
0 | ||||||
|
Статический момент, Нм |
Мрост |
703.627 |
274.586 | ||||||
|
Динамический момент, Нм |
Мродин
|
2110 |
0 |
-2110 |
360 |
0 |
-360 | ||
|
Суммарный момент, Нм |
Мро
|
2814 |
703.627 |
-1406 |
634.586 |
274.586 |
-85.414 | ||