

Условия создания кругового вращающего магнитного поля в машинах перемен- ного тока.
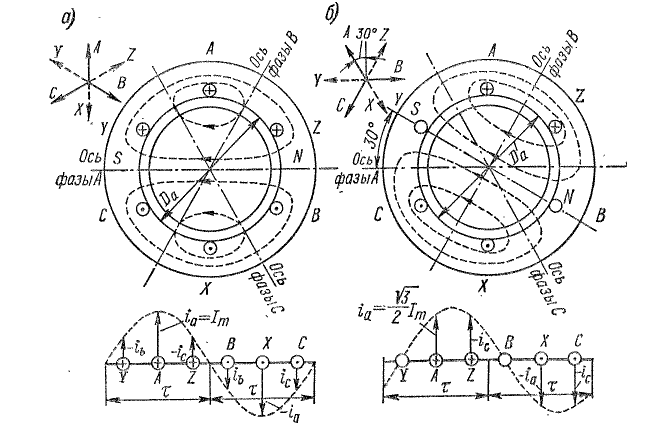
Каждая фаза состоит из одного витка или 2-х пров-в (1-я фаза-пров-и А и Х, 2-я – В и У, 3-я
– С и Z). Пров-ки каждого витка (фазы) распол-ы друг о друга на расстоянии полюсного де- ления:
τ = π∙Da/2р,
Da – диаметр внутр-й расточки статора,
2р – число пар полюсов.
Начало фаз АВС сдвинуты отн-о друг друга на 120° эл-х, что составляет треть окруж-ти. На рис. показ. Направ-е токов в провод-ах обм-к статора для момента времен когда ia = Im и
iв = ic = -1/2∙Im
Распределение токов по окр-ти статора состав-т 2 зоны и направ-е противоположно. Токи
распред-ы на поверхности статора по синусоид-му закону.
Токи создают 2-х полюсный моментный поток Ф1, проход-й ч/з статор, ротор и возд-й зазор м/у ними.
Ось витка фазы А напр-а гориз-о и ось магн-го потока при ia = Im тоже гориз-а. При измен-и фазы токов на 30° кривая распред-я токов и магн-й поток поворачив-я в направ-ии следова- ния фаз на 30° эл.
Если фаза токов измен-я на 120 и iв = Im, то Ф будет направ-н по оси фазы В и т.д. с С. Таким образом обм-а статора 2-х полюсной машины при питании ее фазным током создает
2-х полюсное вращ-ся манн-е поле. За один перид на 360° эл-х скорость вращения поля n1 = f1 об/сек.,
f1 – частота статора
Магн-е поле вращ-ся в направ-ии чередования фаз АВС обм-к стаора. Для измен-я напр-я
вращ-я поля на обратное дост-о поменять местами на зажимах обм-к стат-а концы 2-х пров- в, идущих от питающей сети.
Если 2р = 4, то n1 = f1/2 2р = 6, то n1 = f1/р
16
Устройство и принцип работы асинхронной машины
АД состоят из двух частей: неподвижной части — статора и вращающейся части — роторa.
Сердечник статора, предст-щий собой полый цилиндр, и ротора набирают из отд. листов электротехнической стали толщиной обычно 0,5 мм. Перед сборкой сердечника листы изо- лируют друг от друга оксидированием или лакировкой или используют сталь, выпускаемую с электроизоляционным покрытием. На внутренней поверхности статора выштамповывают пазы, в кот. укладывают обмотку. Сердечник статора закрепляют в корпусе, а сердечник ро- тора на валу.
Роторы АД. выполняют двух видов: с к.з обмоткой (к.з.АД) и с фазной обмоткой (АД с фазным ротором). Для усиления охлаждения двигателя вместе с кольцами отливают при- мыкающие к ним вентиляционные лопатки. Подшипниковые щиты прикрепляют к корпу-
су статора. В корпусе крепят сердечник статора. В АД воздушный зазор между статором и ротором выбирают минимально возможным из механических соображений. С уменьшением зазора снижается потребляемый из сети намагничивающий ток, что способствует повыше- нию cos ф Д.
Принцип работы АД: Ротор АД неподвижен и к его валу не приложен тормозной момент. Если 3фаз-ю обмотку статора подключить к 3фаз. сети, то токи, протекающие по обмотке, создадут вращ-ся магн-ое поле. Угловая скорость этого поля, назыв-ая синхронной, равна
ω
=2πf1/p
(f1
-частота
сети).
Магнитное
поле
при
своем
вращении
пересекает
пров-ки
об-
мотки
ротора
и
индуцирует
в
них
ЭДC.
При
определении
направления
ЭДС
по
правилу
правой
руки
принималось,
что
поле
неподвижно,
а
движ-е
пров-ка
происходит
в
сторону,
противоп-ую
вращ-ию
поля.
Т. к. обмотка ротора замкнута, то в ней воз-ет ток I2, активная состав-ая кот. будет по на- прав-ию совпадать с ЭДС. Ток I2, взаимод-уя с магнитным полем, создаст вращающий мо- мент М, под действием кот-го ротор придет во вращ-е. Как можно установить по правилу левой руки, направ-ие момента и вращения ротора будут совпадать с направ-ем вращения поля.
По мере разгона ротора, его угловая скорость будет увелич-ся, но даже при отсутствии нагр-ки на валу (х.х) он не сможет достигнуть скорости вращения поля. Ток I2 и момент дв.
М увеличиваются с ростом ЭДС в роторе, кот. пропорц-на разности
w1 - w. При увелич-ии момента нагрузки на валу двигателя, М2 должен увеличиваться, эл.магнитный момент дв. М=Мо+М2, вследствие чего возр-ет разность w1 - w. Т.о. для рассматриваемого дв. характерной особенн-ю является несинхронное (асинхроное) вращ-ие его ротора с магнитным полем. Отсюда и его название - АД. Разницу м/у скор-ми или час- тотами вращ-ия ротора и поля принято оценивать велич-ой, назыв-ой скольжением s:
s = (w1 - w)/w1 = (n1 -n)/n1
где w1 = 2πf1/р = 2πn1/60, w = 2πn/60 - угловые скорости поля и ротора.
Асинх-ая машина может работать также в генер-ом режиме и реж. эл.магн-ого тормоза.
Ген-ый режим возникает в том случае, когда ротор с помощью постороннего дв-я будет вращ-ся в направлении поля со скор-ю, большей скорости поля.
Если ротор под действием посторонних сил начнет вращ-ся в сторону противопол-ю вращ- ю поля, то возникает режим электромагн. тормоза.
17
Рабочие характеристики асинхронного двигателя
Рабочие характ-ки дв-я — это зависимость потребляемой мощности Р1, первичного тока I1, оэффиц-а мощн-и cosφ, момента на валу М, скольжения s и КПД от полезной мощности Р2 при постоянных номинальных напряжениях и частоте сети. Рабочие характ-ки позволяют находить все осн. величины, опред-е реж.работы дв. при различных нгрузах.
Задаваясь несколькими значениями мощности на валу Р2, находим для этих точек значе- ния токов I1 потребляемой из сети мощности Р1 и момент на валу М. По соответствующим шкалам после дополнит-ых построений определяем cosφ, и s. КПД приближенно находим как отношение Р2/Р1.
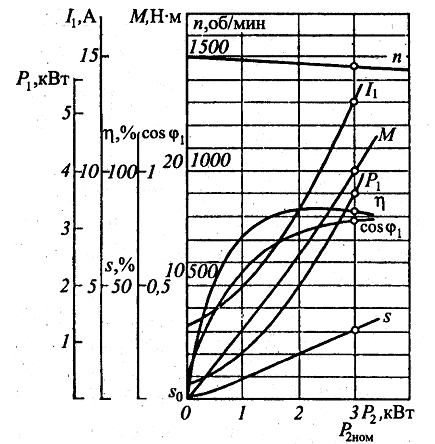
При Р2=0 величина I1 и cosφ соответ-т реж.х.х.
18
Способы пуска синхронных двигателей. Синхронный компенсатор.
B подавляющем большинстве случаев применяется асинхронный пуск синхронных двига-
телей. Обычно синхронные двигатели имеют на своем валу возбудитель в виде генератора постоянного тока параллельного возбуждения (рис. 37-1). При пуске по схеме рис. 37-1, а контакты 7 разомкнуты, а контакт 8 замкнут. При этом обмотка возбуждения двигателя 2 замкнута через сопротивление 6 и асинхронный пуск происходит в наиболее благоприят- ных условиях. В конце асинхронного пуска, при s0,05, срабатывает частотное реле, об- мотка которого (на рис. 37-1, а не показана) подключена к сопротивлению 6, и включает контактор цепи возбуждения. Контакты 7 контактора при этом замыкаются, а контакт 8 размыкается. В результате в обмотку 2 подается ток возбуждения и двигатель втягивается в синхронизм.
Рис. 37-1. Схемы цепи возбуждения синхронного двигателя с машинными возбудителями при пуске с разрядным сопротив- лением (а) и с наглухо приключенным возбудителем (б)
I — якорь двигателя; 2 — обмотка возбуждения двигателя; 3
— якорь возбудителя; 4 — обмотка возбуждения возбудителя; 5 — реостат возбуждения возбудителя; 6 — разрядное сопро-
тивление; 7 и 8 — контакты контактора или автомата гашения
Пуск по схеме рис. 37-1, а поля
отличается определенной сложностью. Поэтому в последнее время все чаще применяется схема рис. 37-1, б с наглухо присоединенным возбудителем. При этом по цепи якоря 3 при пуске протекает переменный ток, который, однако, не причиняет вреда. При п = (0,60,7)пн возбудитель возбуждается и возбуждает синхронный двигатель, благодаря чему при при- ближении к синхронной скорости двигатель втягивается в синхронизм.
Пуск по схеме рис. 37-1, б происходит в менее благоприятных условиях. Во-первых, дви- гатель возбуждается слишком рано и при этом возникает дополнительный тормозящий мо- мент на валу Мк. Во-вторых, в данном случае по сравнению со схемой рис. 37-1, а кривая асинхронного момента имеет менее благоприятный вид. Тем не менее, схема рис. 37-1, б обеспечивает надежное втягивание двигателя в синхронизм, если момент нагрузки на валу Мст при п п„ не превышает (0,40,5)Мн. Путем совершенствования пусковой обмотки дви- гателя можно достичь надежного втягивания в синхронизм при Мст = Мн. Пуск по схеме рис. 37-1, б по своей простоте приближается к пуску короткозамкнутого асинхронного двигателя и поэтому находит в последние годы все более широкое применение.
Обычно производится прямой асинхронный пуск синхронных двигателей путем включе- ния на полное напряжение сети. При тяжелых условиях пуска (большие падения напряже- ния в сети и опасность перегрева пусковой обмотки или массивного ротора) производится ре- акторный или автотрансформаторный пуск при пониженном напряжении, как и у коротко- замкнутых асинхронных двигателей. Кроме асинхронного пуска, можно привести во враще- ние синхронный двигатель на холостом ходу с помощью соединенной с ним машины (на- пример, в агрегатах «синхронный двигатель-генератор постоянного тока»). В некоторых слу- чаях возможен частотный пуск, когда двигатель питается от отдельного синхронного генера- тора и частота последнего плавно поднимается от нуля. При этом синхронный двигатель приходит в синхронное вращение уже при весьма малой, скорости. Обмотки возбуждения ге- нератора и двигателя в этом случае необходимо питать от посторонних источников. Частот- ный пуск происходит наиболее благоприятно при условии, когда ток возбуждения генера- тора в начале пуска примерно равен номинальному, а ток возбуждения двигателя равен по характеристике холостого хода току возбуждения при UUн и п = пн.
19
Синхронные
компенсаторы
предназначаются
для
компенсации
коэффициента
мощности
сети
и
поддержания
нормального
уровня
напряжения
сети
в
районах
сосредоточения
потре-
бительских
нагрузок.
Нормальным
является
перевозбужденный
режим
работы
синхронного
компенсатора,
когда
он
отдает
в
сеть
реактивную
мощность.
В связи с этим компенсаторы, как и служащие для этих же целей батареи конденсаторов, устанавливаемые на потребительских подстанциях, называют также генераторами реактивной мощности. Однако в периоды спада потребительских нагрузок (например, ночью) нередко возникает необходимость работы синхронных компенсаторов также в недовозбужденном ре- жиме, когда они потребляют из сети индуктивный ток и реактивную мощность, так как в этих случаях напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные па-
дения напряжения. Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует его ток возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Синхронные компенсаторы лишены приводных двигателей и являются синхронными двигателями, работающими на холостом ходу. Компенсаторы строятся на мощность до SН = 100 MB·А и имеют явнополюсную конструкцию, обычно с 2р = 6 или 8. Мощные компенса- торы имеют водородное охлаждение. Для осуществления асинхронного пуска все синхронные
компенсаторы снабжаются пусковыми обмотками в полюсных наконечниках или их полюсы делаются массивными. При этом используется способ прямого, а в необходимых случаях — способ реакторного пуска. Иногда мощные компенсаторы пускаются в ход также с помощью пусковых фазных асинхронных двигателей, укрепляемых с ними на одном валу.
20
Схема замещения одной фазы асинхр-й приведенной машины.

Основные положения:
n = 0, M′ = M′′ = M = 0
Нужно создать МП > МСТ
Однофаз. дв. можно представить в виде 2 3-х фаз.дв. распол-
х на одном валу. Один из дв. работает на прямой волне и созд-т М′ при n = 0, МП′ = МП′′ , а др. на обратной - M′′
При неподвиж-м роторе эти поля создают одинаковые по знач-ю, но разные по знаку М1,М2, п.э. результир-й момент М = 0 и дв. не может прийти во вращ-е. Если ротор привести
во вращ-е в ту или иную сторону, то один из М1 или М2 будет преобладать. Отсутствие пускового мом-а – осн. недостаток 1фаз. а.д.
Сравним мех. Хар-ки 3фаз. И 1фаз. Двигателя (см. рис. а).
Мех.харк 1АД симметрична, значит ротор может вращаться в любую сторону.
Диапазон скольжений при машины работающей в двигательном режиме у однофазно- го АД меньше, чем у 3-х фазной.
Максимальн момент и перегрузочная способность 1-фазного < чем у 3-фазного.
При одинаковом моменте нагрузки скольжение у 1-фазного > чем у 3-фазного.
Величина максимального момента 3-фаз дв. не зависит от активного сопротивления ро- тора (r2), у 1-фаз с увеличением r2 величина макс момента уменьшается (б).
Если r2 настолько велика, что Sкр>1, то машина развивает только тормозной момент
r1, xб1 – актив-е сопрот-е 1 фазы 3 –х фазн.дв.
r2′, x2′ - сопротив-я д/верхней и нижней части схе-
мы – различны при проявл-ии эффекта вытеснения
тока в виду различия частот прямой и обратной со- став-х токов ротора.
Вращ-й момент одногофаз-го дв-я:
По рабочим св-м однофаз. АД близок к 3-х фаз., ра- бот. при сильном искожении питающ-го напр-я. При один-х габаритах мощность 1фаз.АД сост-т 50- 60% от номин. мощности 3-х фаз. дв. Это связано с тем, что обм-ка статора однофаз-го дв. занимает не все пазы и имеет обратное поле, кот. уменьшает вращ-й момент, увел-т потери дв. и вызывает его дополн-й нагрев.
21
22
Способы управления исполнительными двигателями постоянного тока.
Исполнит-ми двиг-ми наз-ся дв., кт. прим-ся в САУ и регулирования различных автомати- зированных уст-к и предназ-ны д/преобр-ния эл-го сигнала (напряжение управления), полу- чаемого от какого-либо измерительного органа", в механическое перемещение (вращение) вала с целью воздействия на соответствующий регулирующий или управляющий аппарат. Номинальная мощность исполнительных Д обычно мала — от долей, ватта до 500—600 вт. К этим Д предъявляются большие требования по точности работы и быстродействию. Обычно требуется, чтобы зависимости момента М и скорости вращения п от напряжения сигнала (управления) Uу были по возможности линейными. Существует ряд разновидно- стей исполнительных двигателей постоянного и переменного тока.
Исполнит-ые дв-ли нормальной конструкции по своему устройству аналогичны нор- мальным машинам постоянного тока. При якорном управлении ток возбуждения iB = const, а на якорь подается напряжение управления Uy. Характеристики M = f(Uy) и n=f(Uy) при этом получаются практически линейными. При полюсном управлении на якорь подается напряжение Ua = const, а напряжение управления Uу подается на обмотку возбуждения. При этом требуется меньшая мощность управления, однако характеристика п=f(Uy) не будет линейной. Поэтому обычно применяется якорное управление.
Магнитоэлектрические машины. В связи с разработкой сплавов ални (А1—Ni), алнико (А1 — Ni — Со), а также ряда других сплавов, обл-щих высокими магнитными св-ми, стало возможным изгот-ние машин без обмотки возбуждения, с постоянными магнитами на ин- дукторе. В частности, с постоянными магнитами изгот-ся исп-ные Д с якорным упр-ем мощ-ю до 50—100 вт. С постоянными магнитами м. строить также Г и Д общего назн-я мощностью до 5—10 квт. Однако вследствие дороговизны указанных сплавов такие маши- ны не получили до сих пор большого распр-ния.
Исполнит-ые дв-ли с полым немагнитным якорем вследствие малой инерции якоря об- ладают большим быстродействием. Полый якорь в виде стаканчика изготовляется из пласт- массы, и на нем размещ-ся и укрепляется якорная обмотка обычного типа, соединенная с коллектором. Внутренний неподвижный ферромагнитный сердечник (статор) при якорном
управлении может быть массивным. Из-за наличия большого немагнитного зазора между внешним и внутренним статорами требуется сильная ОВ, габариты машины увел-ся, а к.п.д. уменьшается. Подобные Д вып-ся мощ-ю до 10—15 вт.
Двиг-ли с печатной обмоткой якоря также обладают малой инерцией. Якорь этого Д име- ет вид тонкого диска из немагнитного материала (текстолит, стекло и т. д.), на обеих сторо-
нах кт. расп-ны медные провод-ки обмотки якоря. Пров-ки вып-ся путем гальванического травления листов медной фольги, наклеенных на диск якоря- получила назв. печатной об-
мотки. Схема обмотки якоря обычная, 2хслойная, причем пров-ки отд-ых слоев расп-ны на разных сторонах диска и соед-ся электр-ки м/у собой ч/з отв-я в диске. Возбуждение осущ- ся с пом-ю постоянных магнитов или ОВ. Напряжение таких машин сост-ет 6—50 в. Тахогенераторы представляют собой маломощные электрические генераторы (обычно до Рн = 10 ч- 50 вт), которые служат в системах автоматики для преобразования скорости вращения в электрический сигнал (напряжение Uc). От тахогенераторов требуется линейная зависимость Uc = f(n) c точностью до 0,2—0,5%, а иногда с точностью до 0,01%.
23