

Автоматизированные методы монокулярных измерений
Монокулярные измерения в фотограмметрии, как известно, выполняются при внутреннем ориентировании снимков (измеряя координатные метки), при обработке одиночных снимков, а также при измерениях маркированных точек в наземной фотограмметрии.
Существует несколько подходов к автоматизации монокулярных измерений:
вычисление центра тяжести фигуры (фрагмента изображения);
вычисление центра на основе уравнения фигуры;
корреляционные методы.
Все эти методы применимы для маркированных точек в виде геометрических фигур (круг, крест, и т.д.)
Рассмотрим каждый из этих методов.
Вычисление центра тяжести фигуры
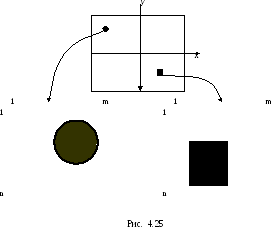
Для получения координат центра xс,yс маркированной точки сначала выделяют фрагмент изображения вокруг данной точки, как показано на рис.4.25. Затем этот фрагмент изображения можно рассматривать как некоторое материальное тело и применить к нему известный из математического анализа метод вычисления центра тяжести этого тела.
Для дискретного изображения размером nxm пикселей можно записать:


 (4.46)
(4.46)
где fij – значение плотностей пикселей или их функции (градиенты и.т.д.).
Выражения (4.46) являются универсальными в смысле формы маркированных точек. Такой подход позволяет определить координаты центра фигуры (маркированной точки) с точность 0.1 пикселя. Однако, этот метод очень чувствителен к шумам изображения. Поэтому для повышения точности определения координат xс,yс сначала целесообразно выполнить предварительную обработку изображения, например, с помощью оператора LoG (4.45), что позволит сгладить изображение и одновременно подчеркнуть маркированную точку. Затем выполняют пороговое удаление шумов, например, с помощью следующих преобразований:
 (4.47)
(4.47)
где fmax – максимальное значение плотности фрагмента изображения; Т1,Т2 – пороговые значения плотности изображения (верхняя и нижняя границы соответственно), за пределами которых плотность изображения считается, что принадлежит шумам.
Таким образом, можно бороться со случайными шумами изображения. Однако при наличии локальных шумов данный метод может привести к грубым ошибкам измерений. Источником такого шума могут быть блики, тени, посторонние изображения объектов, попавшие в обрабатываемый фрагмент с маркированной точкой (рис. 4.26).

Рис. 4.26
В этом случае центр тяжести будет смещен в сторону локального шума. С подобного рода шумами можно бороться, если использовать другой метод нахождения центра маркированной точки, основанный на использовании уравнения фигуры.
Вычисление центра на основе уравнения фигуры
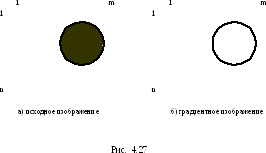
Рассмотрим данный метод нахождения координат центра фигуры на примере маркированной точки в форме круга (рис. 4.27). Для этого воспользуемся известным уравнением окружности:
 (
4.48)
(
4.48)
Это уравнение составляется для всех пикселей с координатами xi,yi , имеющих ненулевые значения градиентов в пределах фрагмента изображения, т.е. для пикселей принадлежащих краям маркированной точки. Решение выполняется по способу наименьших квадратов методом последовательных приближений. Для этого переходят к уравнениям поправок вида:
 (4.49)
(4.49)
В качестве приближенных значений неизвестных координат центра фигуры можно взять, вычисленные как центр тяжести, а для радиуса окружности – значение, вычисленное по разностям координат центра круга и пикселя с максимальным значением градиента.
Чтобы уменьшить влияние фотометрических шумов изображения и выделить пиксели принадлежащие границе маркированной точки можно для каждого уравнения (4.49) записать следующий вес:
 (4.50)
(4.50)
где Gmax – максимальное значение градиента в пределах фрагмента изображения Gi – значение градиента для данного (i) пикселя изображения.
Этот
вес играет роль фильтра, который подавляет
шумы (порядка 20%) и сужает область
пикселей, принадлежащих границе контура,
которая получается размытой из-за
условий съемки и предварительной
обработки изображения, до примерно
 1
пикселя.
1
пикселя.
С целью уменьшения влияния локальных шумов (рис. 4.26) соизмеримых по плотности пикселей с маркированной точкой можно ввести второй вес также для каждого пикселя:
 (4.51)
(4.51)
где vi – невязка в i уравнении (4.49);
- средняя квадратическая ошибка единицы веса;
N – номер итерации.
Чем больше поправка vi, тем дальше данный пиксель находится от окружности, а, следовательно, этому уравнению присваивается меньший вес (близкий к нулю) и тем самым исключаются из уравнивания пиксели принадлежащие локальным шумам.
Такой подход обеспечивает определение координат геометрического центра маркированной точки с точностью 0.030.05 пикселя, причем с весом, полученным из уравнивания. Таким образом, решается одновременно и один из наиболее сложных вопросов фотограмметрии – нахождение весов измерений.
Аналогично выполняется определение координат точек в виде эллипса. Для точек в виде креста можно использовать пересечение двух прямых, заданных двумя уравнениями и т.д.