

D1_2_metodichka_metod_kinetostatiki
.pdfФедеральное агентство по образованию
Томский государственный архитектурно-строительный университет
МЕТОД КИНЕТОСТАТИКИ
(ПРИНЦИП ГЕРМАНА–ЭЙЛЕРА–ДАЛАМБЕРА)
Методические указания к самостоятельной работе
Издание второе, с изменениями
Составитель Н.А. Еньшина
Томск 2009
1
Метод кинетостатики (принцип Германа–Эйлера–Даламбера): методические указания / сост. Н.А. Еньшина. – Томск: Изд-во Том. гос. архит.-строит. ун-та, 2009. – 33 с.
Рецензент: старший преподаватель М.В. Геттингер Редактор Е.Ю. Глотова
Методические указания к самостоятельной работе по дисциплине ЕН.Ф.6 «Теоретическая механика» для студентов всех специальностей очной формы обучения, кроме обучающихся по направлению 270300 «Архитектура».
Печатаются по решению методического семинара кафедры теоретической механики № 3 от 03.10.2008 г.
Утверждены и введены в действие проректором по учебной работе В.В. Дзюбо
с 01.09.2009 по 01.09.2014
Технический редактор О.Н. Лысак
Подписано в печать.
Формат 60×90/16. Бумага офсет. Гарнитура Таймс. Уч.-изд. л. 1,7. Тираж 700 экз. Заказ №
Изд-во ТГАСУ, 634003, г. Томск, пл. Соляная, 2. Отпечатано с оригинал-макета в ООП ТГАСУ.
634003, г. Томск, ул. Партизанская, 15.
|
ОГЛАВЛЕНИЕ |
|
1. |
Введение.......................................................................................... |
4 |
2. |
Принцип Даламбера для материальной точки.............................. |
4 |
3. |
Метод кинетостатики для механической системы ..................... |
10 |
4. |
Определение реакций связей при движении |
|
|
механической системы.................................................................. |
15 |
5. |
Динамическое уравновешивание масс......................................... |
28 |
6. |
Список рекомендуемой литературы............................................ |
33 |
3
«Однако только Даламбер подошёл к этому принципу с более общей точки зрения и придал ему ту простоту и плодотворность, на которые только он был способен».
Лагранж
1. ВВЕДЕНИЕ
Метод кинетостатики – один из наиболее общих, эффективных и простых методов решения первой основной задачи динамики свободной и несвободной материальной точки и механической системы. В основе этого метода лежит принцип Германа–Эйлера– Даламбера.
2. ПРИНЦИП ДАЛАМБЕРА ДЛЯ МАТЕРИАЛЬНОЙ ТОЧКИ
2.1. Теория
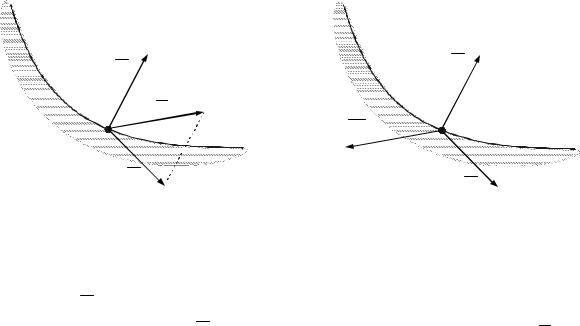
Рассмотрим несвободную материальную точку М, движущуюся по гладкой изогнутой поверхности (рис. 1, а).
б)
R  R ma
R ma
F F
Рис. 1
Пусть F – равнодействующая активных сил, действующих на материальную точку М , R – реакция связи, m – масса точки, a– её ускорение. Тогда основной закон динамики для точки M запишется так [1]:
4
ma |
F R . |
(2.1) |
Векторное равенство (2.1) можно переписать следующим образом:
|
F |
|
R |
ma |
0. |
(2.2) |
Введём обозначение Ф ma и назовём этот вектор силой инерции материальной точки в данное мгновение.
Сила инерции материальной точки равна произведению массы точки на её ускорение и направлена противоположно этому ус-
корению. Следовательно, равенство (2.2) перепишется в виде |
|
F R Ф 0. |
(2.3) |
Полученное равенство (2.3) выражает принцип Даламбера для несвободной материальной точки: в любой момент времени для вся-
кой несвободной материальной точки геометрическая сумма равнодействующей активных сил, реакций связи и силы инерции равна нулю [1]. Для свободной материальной точки в равенстве (2.3) будет отсутствовать реакция связи R . Этот общий метод решения первой основной задачи динамики (метод кинетостатики) в 1716 году был предложен Германом и в 1737 г. обобщён Эйлером, в литературе он известен как принцип Даламбера.
В классической механике силу инерции материальной точки считаем реальной силой, противодействующей изменению скорости движущейся точки, однако приложена эта сила не к самой точке, а к телу, вызывающему ускорение данной точки.
|
|
|
|
|
|
a |
|
|
|
|
a |
В |
||
|
|
|
|
n |
|
|
|
|
|
|
|
|||
|
|
|
n |
|
|
|
||||||||
|
|
|
|
|
|
М |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
an + – А |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||
0
Рис. 2
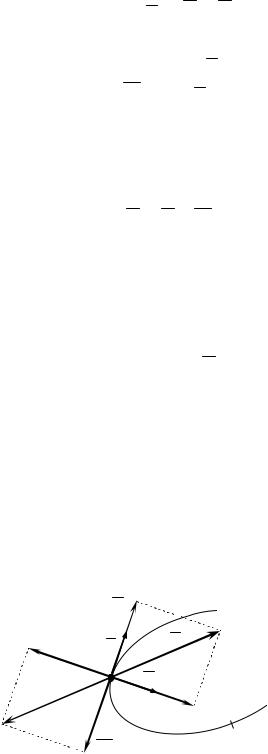
При криволинейном движении материальной точки её сила инерции складывается из двух составляющих – касательной (враща-
5
тельной) и нормальной (центробежной), – соответствующих двум составляющим ускорения – касательному и нормальному (рис. 2):
Ф Фn Ф .
|
|
|
|
|
|
dV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Ф ma m |
|
|
, |
||||||||||
|
dt |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
V2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
Фn man m |
|
|
n. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модули касательной и нормальной сил инерции равны
|
|
dV |
|
V2 |
||
Ф |
m |
|
, Фn |
m |
|
. |
dt |
|
|||||
|
|
|
|
|
||
(2.4)
(2.5)
Если материальная точка принадлежит вращающемуся телу и движется по окружности радиуса R, то модули касательной и нормальной сил инерции равны
Ф mR , Фn mR 2, (2.6)
где , – угловая скорость и угловое ускорение вращающегося тела.
2.2. Пример 1
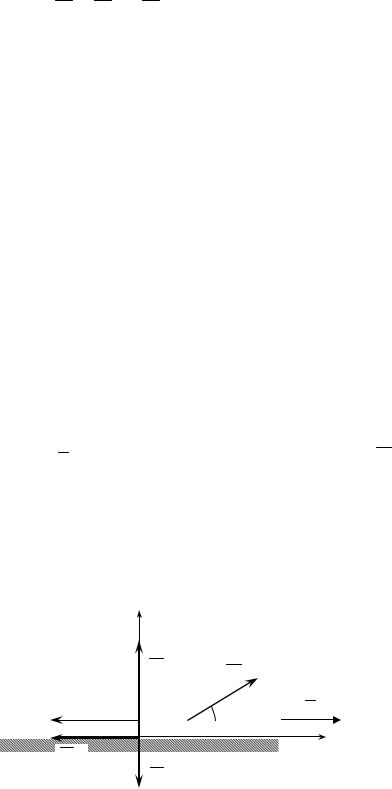
Ящик весом Р движется по горизонтальной шероховатой плоскости с ускорением a под действием некоторой силы Q , образующей с горизонтом угол ; коэффициент трения скольжения f (рис. 3).
Определить: 1) модуль силы Q; 2) значение угла и наименьшую величину силы Q, сообщающей ящику данное ускорение.
y
N Q
|
|
|
|
α |
|
а |
|
||||||
|
|
|
|
|
|
|
Fтр
x
Р
Рис. 3
6
Решение. На движущийся ящик действуют силы (рис. 3): P – сила тяжести, N – нормальная реакция плоскости, Fтр – сила трения,
Q – искомая сила. Если к этим силам присоединить ещё силу инер-
ции ящика, равную Ф Р a , то получим уравновешенную систему g
сил для данного мгновения. Согласно методу кинетостатики, составим условияравновесия для сходящихсясилв проекцияхна оси x и y:
Qcos Ф Fтр 0; |
(2.7) |
|||||
|
|
|
|
|
||
Qsin P N 0. |
|
|||||
Учитывая, что F f N, |
Ф |
Р |
a и решая (2.7), получим |
|
||
|
|
|||||
тр |
|
g |
|
|||
|
|
|
|
|||
Q |
|
( fg a)P |
|
|||
|
. |
(2.8) |
||||
g cos f sin |
||||||
Определим минимальное значение силы Q. Из (2.8) ясно, что силе Qmin будет соответствовать максимальное значение функцииcos f sin . Экстремальное значение функции нахо-
дится из условия d 0, откуда следует, что
|
d |
|
|
tg f . |
|
(2.9) |
|
|
|
|
|
|
|
||
Как видим, угол равен углу трения [1]. |
|
|
|||||
Поскольку |
|
d2 |
|
0 |
, то найденное значение |
|
соответствует |
|
d 2 |
||||||
|
|
|
|
|
|
||
максимуму функции , а следовательно, минимальному значению силы Q. После некоторых преобразований, с учётом (2.9), получим
Q |
fg |
a P |
. |
(2.10) |
|||
|
|
|
|||||
min |
|
g 1 f 2 |
|
||||
|
|
|
|||||
Если ускорение a 0, то |
|
fP |
|
|
|
|
|
Q |
|
|
. |
(2.11) |
|||
|
|
|
|
||||
|
|
||||||
|
1 f 2 |
|
|||||
Таким образом, найдено минимальное значение силы Q, сдвигающей ящик, направление этой силы определяется углом трения.
7

2.3. Пример 2
На криволинейных участках железнодорожного пути возвышают наружный рельс над внутренним для того, чтобы давление проходящегопоезда нарельсы былоперпендикулярнополотнудороги.
Определить величину возвышения наружного рельса над внутренним при следующих данных: радиус закругления пути400 м, скорость поезда V 10м/с, расстояние между рельсами l 1,6м.
а) |
|
б) |
|
|
|
O |
|
|
O |
C an |
C |
в) |
||
|
|
|
||
R |
Р |
R |
Р |
N α Р |
А N |
В |
h αА N |
|
|
В |
|
|||
|
l |
Е |
|
|
|
|
|
|
|
|
|
Рис. 4 |
|
|
Решение. Рассмотрим движение центра тяжести С вагона как движение материальной точки, сосредоточив его массу в этом центре тяжести (рис. 4). Тогда сила инерции, приложенная в точке С на криволинейном участке пути, направлена по радиусу закругления ОС в сторону, обратную аn , и по модулю равна
|
man |
|
P V2 |
|
|||
Фn |
|
|
|
|
, |
(2.12) |
|
g |
|
||||||
|
|
|
|
|
|
||
где P– вес вагона, V – его скорость, – радиус закругления полотна железной дороги. Вращательной составляющей силы инерции не будет, так как скорость поезда постоянна. Если полотно пути горизонтально (рис. 4, а), то равнодействующая сил Р и Ф не будет перпендикулярна к полотну дороги и пройдёт либо внутри полотна АВ и вызовет неодинаковое давление на рельсы (больше на наруж-
8
ный рельс), либо пройдёт вне «АВ», и вагон опрокинется. Следовательно, сила инерции Ф фактически действует на наружный рельс, стремясь вырвать крепление рельсов к шпалам. Во избежание этих опасных явлений наружный рельс возвышают над внутренним (рис. 4, б) так, чтобы давление на рельсы было перпендикулярно полотну дороги, прижимая рельсы к шпалам. Так как N – реакция рельсов, то, согласно принципу Даламбера, силы P,Ф и N вза-
имно уравновешены и имеет место векторное равенство |
|
P Ф N 0. |
(2.13) |
Строим замкнутый силовой треугольник [4] (рис. 4, в) и из подобия силового треугольника и ABE составим пропорцию
|
|
h |
|
|
Ф |
|
h |
|
|
V2 |
|
|
|||||||||
|
|
|
|
|
|
|
, или |
|
|
|
|
|
|
|
. |
|
|
(2.14) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
l2 h2 |
|
|
P |
|
l2 h2 |
|
|
g |
|
|
|||||||||
Из (2.14) получим |
|
|
|
V2l |
|
|
|
|
|
|
|
|
|
||||||||
|
|
h |
|
|
|
|
|
. |
|
|
|
|
|
|
(2.15) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
g |
1 |
V4 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
g2 2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Формулу (2.15) можно упростить, если учесть, что |
V |
4 |
– малая ве- |
||||||||||||||||||
g2 2 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
личина при реальных скоростях по сравнению с единицей, тогда формула (2.15) упростится и будет иметь вид
h |
V2l |
. |
(2.16) |
g
Формула (2.16) вполне пригодна для практических целей. В условиях нашей задачи возвышение наружного рельса над внутренним h равно
h 102 1,6 0,041(м) 4,1 (см). 9,81 400
9

3. МЕТОД КИНЕТОСТАТИКИ ДЛЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
3.1. Принцип Даламбера для механической системы
Рассмотрим несвободную механическую систему, состоящую из n материальных точек [1]. Применим к каждой i-й точке этой системы принцип Даламбера (2.3):
|
|
|
|
|
|
|
i 1, 2, , n , |
(3.1) |
Fi |
Ri Фi 0, |
|||||||
где Fi – равнодействующая заданных сил, приложенных к i-й точке;
Ri – равнодействующая реакций связей, наложенных на i-ю точку;
Фi – сила инерции i-й точки. Система уравнений (3.1) выражает принцип Даламбера для механической системы: если к каждой
точке движущейся механической системы условно приложить соответствующую силу инерции, то в любой момент времени действующие на эту точку активные силы, силы реакций связей и сила инерции образуют уравновешенную систему сил.
Значение принципа Даламбера состоит в том, что при его применении уравнения движения точки и системы составляются в форме уравнений статики. Метод решения динамических задач с помощью принципа Даламбера называют методом кинетостатики. Однако для решения задач применяют не сам принцип Даламбера, а следствия из него.
Сложимуравнения(3.1)длявсех n точекмеханическойсистемы:
|
|
|
|
|
|
|
|
|
|
|
0. |
(3.2) |
|||||||
Fi |
Ri Фi |
||||||||||||||||||
Обозначим |
|
|
|
– главный вектор |
заданных сил, |
|
|
|
|
|
|||||||||
Fi |
F |
Ri R – |
|||||||||||||||||
главный вектор реакций связей, |
|
i |
|
|
– главный вектор сил |
||||||||||||||
Ф |
Ф |
||||||||||||||||||
инерции точек системы. Следовательно, (3.2) перепишется следую-
щим образом: |
|
F R Ф 0. |
(3.3) |
Из уравнения (3.3) следует: в любой момент времени для
всякой несвободной механической системы геометрическая сумма главных векторов заданных сил, реакций связей и сил инерции материальных точек системы равна нулю.
10