

D1_2_metodichka_metod_kinetostatiki
.pdfчасти кольца (рис. 7, б). Действие отброшенной левой части на правую заменим силами T . Пусть Ф – равнодействующая сил инерции правой части кольца. Тогда согласно методу кинетостатики имеем:
|
|
|
Ф 2Т 0. |
|
|
|
|
|
(4.14) |
||||||||||||
Силу инерции Ф можно вычислить двумя способами. |
|
||||||||||||||||||||
Первый способ. Выделим элемент дуги длиной dl, соответст- |
|||||||||||||||||||||
вующий углу d . Сила инерции этой элементарной дуги равна |
|||||||||||||||||||||
|
|
dФ andm, |
|
|
|
|
|
(4.15) |
|||||||||||||
где dm – масса выделенного элемента, an |
– его нормальное ускоре- |
||||||||||||||||||||
ние. Поскольку dm |
|
S dl |
|
S rd и an 2r, то |
|
||||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
g |
|
|
g |
|
|
|
|
|
|
|||||||||
|
|
dФ |
|
S r2 2d . |
|
|
|
|
|
(4.16) |
|||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проецируя (4.16) на ось Ox, получим |
|
|
|
|
|
|
|||||||||||||||
dФ* dФ cos |
|
S r2 2 cos d . |
(4.17) |
||||||||||||||||||
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
||
Интегрируя выражение (4.17), получим |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
||
|
|
S r2 2 |
|
2 |
|
|
|
|
|
2 S r |
|
|
|
||||||||
Ф |
|
cos d |
|
|
. |
(4.18) |
|||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
g |
|
|
g |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Второй способ. Модуль равнодействующей сходящихся сил инерции выделенной половины кольца равен
Ф MaC ,
где М – масса половины кольца, аС – ускорение центра тяжести этой половины кольца. Очевидно, вес половины кольца P Mg r S, aC 2xC (xC – расстояние от центра тяжести С половины кольца до геометрического центра кольца O). Как известно из статики [4],
x |
|
2r |
, следовательно, |
|
|
|
|
|
|
|
|
|
|||
C |
|
|
|
2 Sr2 2 |
|
|
|
|
|
|
Ф Ма |
|
. |
(4.19) |
|
|
|
|
|
||||
|
|
|
С |
|
g |
|
|
|
|
|
|
|
|
||
Как видим, полученный результат (4.19) совпадает с прежним результатом (4.18).
21

Теперь из равенства (4.14) определим Т:
Т |
Ф |
|
Sr2 2 |
|
|
|
|
|
. |
(4.20) |
|
2 |
|
||||
|
|
g |
|
||
Искомое напряжение:
|
T |
|
r2 2 |
|
|
|
|
|
|
. |
(4.21) |
S |
|
||||
|
|
g |
|
||
Учитывая, что r V – линейная скорость точки обода колеса, получим
[ ] |
|
V2. |
(4.22) |
|||
|
||||||
|
|
|
g |
|
||
Тогда критическая скорость Vкр |
будет равна |
|||||
|
|
|
|
|
||
V |
g |
[ ] , |
|
|||
|
|
|||||
кр |
|
|
||||
|
|
|||||
где [ ] – допускаемое напряжение для данного материала. Например, для чугунного маховика :
7,25 103 кг/м3, [ ] 7 106 Па 7МПа,
тогда V |
9,81 7 106 |
30,8 м/с. |
|
||
кр |
7,25 103 |
|
|
|
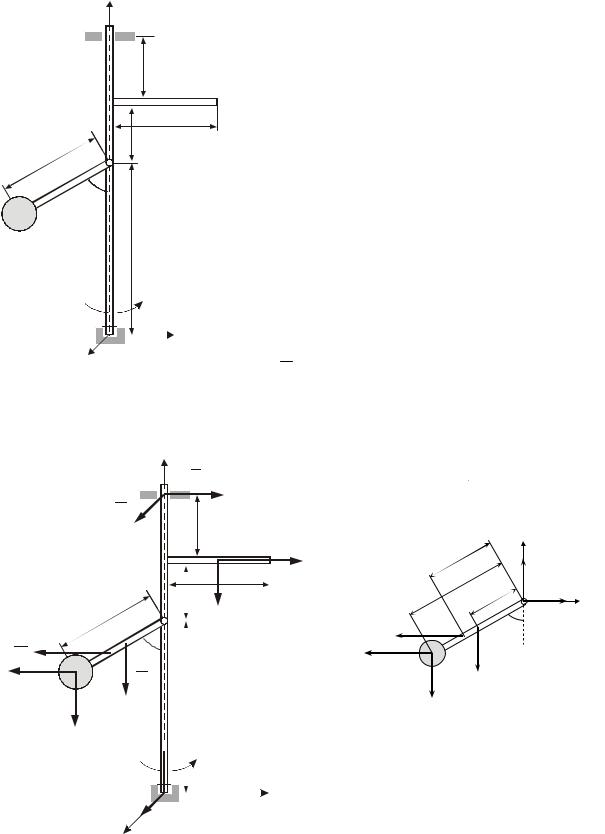
4.3. Пример 6
Однородный тонкий стержень ОЕ весом Р1 и длиной l, а
также шар весом P2 прикреплены к вертикальному валу шарниром
O. Кроме того, к валу, вращающемуся с постоянной угловой скоростью в той же плоскости, прикреплён однородный стержень AB весом P3, как показано на рис. 8. Весом вала и размерами шара E
пренебречь.
Определить: 1) зависимость угла отклонения стержня от вертикали от угловой скорости вращения вала; 2) динамическую составляющую реакции шарнира О; 3) реакции подпятника D и подшипника C.
22
C |
z |
|
|
||
A |
a |
|
l |
||
|
||
l O |
a |
|
|
||
|
|
|
E |
3a |
|
|
||
|
y |
|
x |
D |
Рис. 8
Решение. Рассматриваемая механическая система состоит из нескольких тел: шара, двух стержней и вала. При
Bравномерном вращении вала сила инерции шара по модулю равна
|
Р |
|
P |
2 |
|
|
|
Ф2 |
2 |
aE |
|
2 |
|
lsin . |
(4.23) |
|
g |
||||||
|
g |
|
|
|
|
||
Направлена сила Ф2 как указано на рис. 9 а, б. Модуль равнодействующей сил инерции стержня ОЕ равен
Ф |
P1 |
2 |
l |
sin , линия действия рав- |
|
2 |
|||
1 |
g |
|
||
нодействующей находится на расстоя-
нии 2lcos от точки O. 3
|
|
|
|
|
|
|
а) |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
C |
|
YC |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
l |
|
|
|
y |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
XC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
YO x |
||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
2 |
ll |
|
|
|
Oy |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
B |
|
Ф33 |
|
|
|
|
Ф1 |
3 |
|
|
|
|
|
|
|
XO |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
Ф2 |
|
|
|
|
l |
|
|
|
|
|
|
O |
||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5l |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
E |
|
|
|
|
|
|
|
P1 |
|
|
|
|
x |
|||||
|
|
|
|
|
|
|
l |
|
O |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
P2 |
|
|
|
|
|
|
XO |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Ф |
|
|
Ф11 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
22 |
E |
P1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Е |
|
|
|
|
|
|
Р1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
3a |
|
|
|
|
|
|
|
|
|
|
|
Р2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
P2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ZD
 YD y
YD y
XD 
 x D
x D
Рис. 9
23

Модуль равнодействующей сил инерции стержня AB равен
Ф3 P3 2 l и направлен вдоль стержня от оси вращения (рис. 9, а). g 2
Для определения реакций подпятника D и подшипника C надо к системе сил инерции присоединить ещё веса стержней и шара и составить уравнения кинетостатики для произвольной пространственной системы сил:
Xi 0; XC XD 0; |
|
|
|
|
|
|
|
|
||||||
Yi 0; YC YD Ф1 Ф2 Ф3 0; |
|
|
|
|
|
|
||||||||
Zi 0; ZD P1 P2 P3 0; |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
mx Fi 0; |
|
|
|
|
|
|
|
|
||||||
|
YC 5a Ф34а Ф1 |
|
3а |
|
|
lcos |
|
|
(4.24) |
|||||
|
3 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
|
3a lcos P |
l |
sin P lsin P |
l |
0; |
||||||
|
|
|
|
|
||||||||||
|
|
|
2 |
1 2 |
|
|
|
2 |
|
3 2 |
|
|||
my Fi 0; XC 5a 0;
mz Fi 0.
Чтобы решить систему уравнений (4.24) и найти составляющие реакций опор С и D, надо знать угол отклонения стержня ОЕ от вертикали. Для этого расчленим рассматриваемую механическую систему (рис. 9 а) и рассмотрим стержень ОЕ отдельно (рис. 9 б). Составим уравнение моментов сил, приложенных к рассматриваемому стержню ОЕ, относительно центра О:
mO |
|
0; |
P2lsin P1 |
l |
sin Ф2lcos Ф1 |
2 |
lcos 0. (4.25) |
|
Fi |
||||||||
2 |
3 |
|||||||
|
|
|
|
|
|
Подставляя выражения сил Ф2 и Ф1 в (4.25), для случая 0 полу-
чим |
cos |
2P2 P1 |
3g |
|
1 |
. |
(4.26) |
|
|
||||||
|
|
3P2 P1 2 l 2 |
|
|
|||
Исходя из полученного соотношения (4.26), можно сказать, что эта задача имеет смысл, если числовые данные удовлетворяют условию cos 1, отсюда
|
|
2P2 P1 3g |
|
|
||
|
. |
(4.27) |
||||
3P P 2l |
||||||
|
|
2 |
1 |
|
|
|
24

В задаче требуется также найти динамическую составляющую реакции шарнира О. Исключая из рассмотрения статические нагрузки (вес стержня ОЕ Р1 и вес шара Р2) и проецируя на ось x силы инерции, приложенные к стержню OE (рис. 9 б), получим
Xд |
|
|
|
Р |
|
l 2 |
|
||
Ф Ф |
|
|
1 |
Р |
|
|
sin . |
(4.28) |
|
|
2 |
|
|||||||
O |
1 |
2 |
|
2 |
|
g |
|
||
После этого решаем систему уравнений (4.24) и определяем реакции подпятника D и подшипника C: XC, XD,YC,YD, ZD. Давления на опоры равны реакциямопор и противоположноимнаправлены.
4.4. Пример 7
Лебёдка, поднимающая груз P 20кН, поставлена на балке АВ длиной 2l 10м и закреплена как показанона рис 10,а. Здесь А – цилиндрический шарнир, В – каток. Груз поднимается равноускоренно с ускорением а 2м/с2. Общий вес лебёдки вместе с барабаном и балки Q 4кН и их центры тяжести лежат на одной вертикали, проходящей через середину пролёта балки АВ. Барабан лебёдки считать однородным цилиндром с радиусом r 0,5 м и вращаю-
щимся вокруг своей оси О. Вес барабана P1 800H, g 9,8м/с2 , весом троса пренебречь.
Определить общие реакции опор балки, а также их динамические и статические составляющие.
Решение. Рассмотрим систему тел: лебёдка–груз–балка
(рис. 10, а).
Для выделенной системы внешними силами являются силы тяжести и реакции внешних связей – катка В и цилиндрического шарнира А. Присоединим к этим силам силу инерции Ф груза и момент сил инерции МОФ барабана лебёдки (рис. 10, б).
Сила инерции груза, движущегося поступательно с ускорени-
ем |
а |
, по модулю равна |
|
||
|
|
Ф |
Р |
a |
(4.29) |
|
|
|
|||
|
|
|
g |
|
|
и направлена вниз.
25

|
|
О |
r |
|
а) |
|
В |
||
|
А |
|
||
|
|
|
|
|
|
|
|
|
|
а
|
r |
l |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
YA |
|
|
|
|
|
|
|
|
|
|
MO |
YB |
|||||||||||||
|
|||||||||||||||||||||||||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
YAд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
МО |
|
YBд |
||||||||||||
в) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
В |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ст |
||||||
г) |
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
||||||||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|||||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|||||||
Рис. 10
Барабан лебёдки вращается вокруг оси симметрии, поэтому силы инерции его частиц сводятся к паре сил с моментом МОФ, равным по модулю:
МОФ JO , |
(4.30) |
26

где JO – момент инерции барабана относительно оси вращения, –
угловое ускорение барабана; направление МО противоположно угловому ускорению .
Так как барабан – однородный цилиндр, то его момент инерции относительно оси O равен
|
|
|
P |
2 |
|
|
|||
JO |
1 |
r |
|
. |
(4.31) |
||||
|
|
|
|||||||
|
|
|
2g |
|
|
|
|||
Угловое ускорение барабана, очевидно, равно |
|
||||||||
|
a |
. |
|
|
|
|
|
|
(4.32) |
|
|
|
|
|
|
|
|||
|
r |
|
|
|
|
|
|
|
|
Следовательно, |
|
Р |
|
|
|
||||
Ф |
|
|
|
|
|||||
MO |
|
1 |
r a. |
(4.33) |
|||||
|
|
||||||||
|
|
|
|
2g |
|
|
|
||
Схема сил, действующих на балку, показана на рис. 10, б. Согласно методу кинетостатики, составим уравнения равновесия, приняв за центры моментов точки А и В:
m |
|
( |
|
) 0; |
Y |
|
2l Ф P l r Q l MФ 0, |
|
|
F |
|
||||||
|
B |
|
i |
|
A |
O |
(4.34) |
|
m |
|
( |
|
) 0; |
Y 2l MФ Q l P Ф l r 0. |
|
||
A |
F |
|||||||
|
|
i |
B |
O |
|
|||
Из полученной системы (4.34) определим:
YA Ф P l r Q l MOФ 15249 H 15,25 кН, 2l
YB Q l P Ф l r MOФ 12833 Н 12,83 кН, 2l
где Ф и МОФ определены формулами (4.29) и (4.33).
Схема сил для определения динамических реакций показана на рис. 10, в. В этом случае надо ввести в рассмотрение лишь силы инерции и соответствующие им динамические реакции опор YAд; YBд. Уравнение равновесия сил в этом случае можно получить из уравнений (4.34), полагая Р 0, Q 0:
|
д |
|
Ф |
|
|
|
YA |
2l Ф l r MO |
0, |
(4.35) |
|||
д |
|
Ф |
Ф l r 0. |
|
||
|
|
|
||||
YВ |
2l MO |
|
|
|||
Отсюда получим:
27

YАд |
Ф l r MФ |
|
|
|
||
|
O |
|
2249H 2,25 |
кН, |
||
|
2l |
|||||
|
|
|
|
|
||
Yд |
Ф l r MOФ |
|
1833Н 1,83 |
кН. |
||
|
|
|||||
В |
|
2l |
|
|
|
|
|
|
|
|
|
||
Схема сил для определения статических реакций опор приведена на рис. 10, г. В этом случае рассматриваются только активные силы (силы тяжести Р,Q) и определяются соответствующие реак-
ции опор YAст,YBст . Уравнения равновесия также можно получить из уравнений (4.34), полагая Ф 0, МОФ 0:
|
ст |
|
|
|
YА |
2l Р l r Q l 0, |
(4.36) |
||
ст |
2l Q l Р l r 0. |
|
||
|
|
|||
YВ |
|
|
||
Решая систему, получим:
YАст Р l r Q l 13000H 13кН. 2l
YВст Q l Р l r 11000Н 11кН. 2l
Пользуясь законом независимости действия сил, можно проверить свои вычисления так:
YA YAст YAд 13кН 2,25кН 15,25кН,
YВ YВст YВд 11кН 1,83кН 12,83кН.
Этот результат был получен ранее из уравнений (4.34).
5. ДИНАМИЧЕСКОЕ УРАВНОВЕШИВАНИЕ МАСС
Динамическое уравновешивание масс или уравновешивание сил инерции вращающегося тела можно осуществить при помощи одной или двух точечных масс (шаров), присоединение которых устраняет динамическое давление на опоры. Распределение присоединённых масс зависит от конкретных условий задачи.
При решении подобных задач методом кинетостатики надо ввести в рассмотрение силы инерции заданного вращающегося тела
28

(тел) и силы инерции присоединённых тел (шаров). Затем составить уравненияравновесия этихсилдля произвольногомомента времени.
5.1. Пример 8
Коленчатый вал вращается с постоянной угловой скоростью(рис. 11). Длина стержней колена равна a, его вес – p. Определить веса шаров Q1 и Q2, прикреплённых к валу при помощи невесомых стержней длиной l так, чтобы устранить динамические давления на опоры.
|
|
|
Rин |
|
|
|
|
|
|
3 |
5 |
4 |
|
|
|
|
C |
А |
|
а |
|
В |
D |
|
|
|
|
|
|
||
l |
а |
2а |
|
|
4а |
а |
l |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
Рис. 11 |
|
|
|
|
|
Решение. Силы инерции каждого из присоединённых шаров |
||||||
соответственно равны (рис. 11) |
|
|
|
|
|||
Ф |
Q1 |
2l, Ф |
|
|
Q2 |
2l |
(5.1) |
|
|
|
|||||
1 |
g |
2 |
|
g |
|
||
и направлены по радиусу от оси вращения.
Сила инерции каждого стержня колена, перпендикулярного оси вращения вала, равна
Ф3 Ф4 |
p |
|
2 |
а |
(5.2) |
g |
|
2 |
|||
|
|
|
|
29

и направлена противоположно нормальному ускорению его центра тяжести.
Модуль силы инерции горизонтального стержня колена вала
равен
Ф5 |
|
p |
2 |
a |
(5.3) |
|
|
|
|
||||
g |
||||||
|
|
|
|
|
и направлен также в сторону, противоположную нормальному ускорению его центра тяжести. Равнодействующая сил инерции коленчатого вала по модулю равна
R |
ин |
Ф3 |
Ф4 |
Ф5 |
|
2p |
2 |
a |
(5.4) |
|
|
|
|
||||||
|
g |
||||||||
|
|
|
|
|
|
|
|
|
и направлена в ту же сторону, что и складываемые силы (рис. 11). Полагаем динамические реакции подшипников А и В равными
нулю.
Силы Ф1,Ф2 и Rин образуют плоскую систему параллельных взаимно уравновешивающихся сил. Если составить суммы моментов этих сил относительно точек C и D, то уравнения равновесия принимают вид
mC (Fi) 0; Rин 3a Ф2 8а 0,
(5.5)
|
m |
D |
( |
F |
) 0; |
Ф 8а Rин 5a 0. |
|
|
|
i |
1 |
|
|||
Подставляя (5.1, 5.4) в (5.5), получим
Q 5a p, Q 3a p. |
|||
1 |
4l |
2 |
4l |
5.2. Пример 9
Однородный тонкий диск радиусом R и весом Pнасажен на вал под углом к его оси вращения и жёстко скреплён с валом, причём центр тяжести диска лежит на оси вала (рис. 12, а). Вал вращается с постоянной угловой скоростью . Можно ли уравновесить силы инерции диска двумя шарами, равными по весу, прикрепляя их при помощи невесомых стержней?
Решение. Приведём силы инерции диска к центру С. Главный вектор этих сил Ф МаС 0, ибо центр тяжести диска лежит
30