

3.1.3. Третий закон Ньютона
Третий закон Ньютона имеет следующую формулировку:
Взаимодействующие тела действуют друг на друга с одинаковыми по величине, но противоположными по направлению силами:
![]() ,
(3.6)
,
(3.6)
где
![]() - сила, с которой тело 2 действует на тело
1,
- сила, с которой тело 2 действует на тело
1,![]() - сила, с которой тело 1 действует на тело
2. Силы
- сила, с которой тело 1 действует на тело
2. Силы![]() и
и![]() приложены к разным телам и поэтому не
уравновешивают друг друга.
приложены к разным телам и поэтому не
уравновешивают друг друга.
Из третьего закона Ньютона следует, что всякое действие одного тела на другое имеет характер взаимодействия. Третий закон Ньютона выполняется при непосредственном соприкосновении взаимодействующих тел и для взаимодействия центральными силами неподвижных тел. Из принципа суперпозиции сил (3.1) следует, что закон (3.6) справедлив при взаимодействии тела одновременно с несколькими телами.
Если тела движутся относительно друг друга, то расстояние между ними меняется. Для того, чтобы в соответствии с третьим законом Ньютона, силы взаимодействия были равны друг другу в любой момент времени, необходимо предположить, что скорость передачи взаимодействия бесконечно большая. Однако, согласно теории относительности скорость передачи любого взаимодействия не может превышать скорость света в вакууме. Таким образом, закон справедлив для движущихся тел тем точнее, чем меньше их относительная скорость скорости света в вакууме.
В заключение необходимо отметить, что третий закон Ньютона не применим к нецентральным силам и взаимодействиям микрочастиц.
3.1.4. Динамические характеристики материальной точки и твердого тела, движущегося поступательно
Рис.
3.2
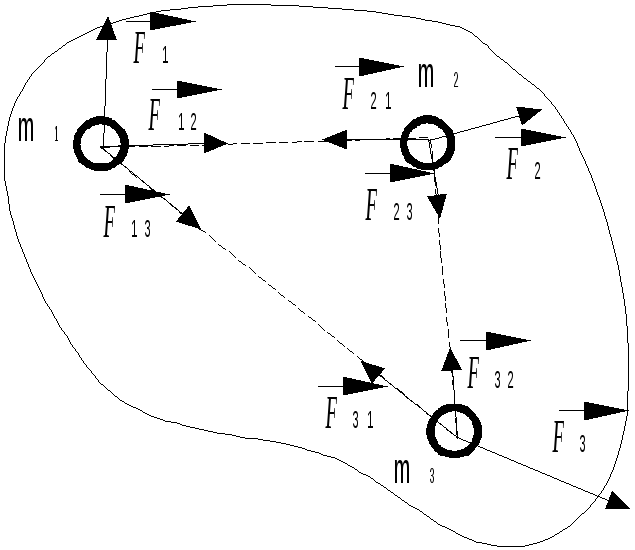
Будем понимать под механической системой совокупность тел, движение которых будем описывать.
Условимся называть тела (или частицы), не входящие в состав рассматриваемой системы, внешними телами, а силы, с которыми они действуют на тела системы - внешними силами.
Силы взаимодействия между телами системы назовем внутренними.
Рассмотрим систему из трех материальных точек (рис. 3.2.). Составим уравнение второго закона Ньютона в форме (3.3) для каждого тела системы:
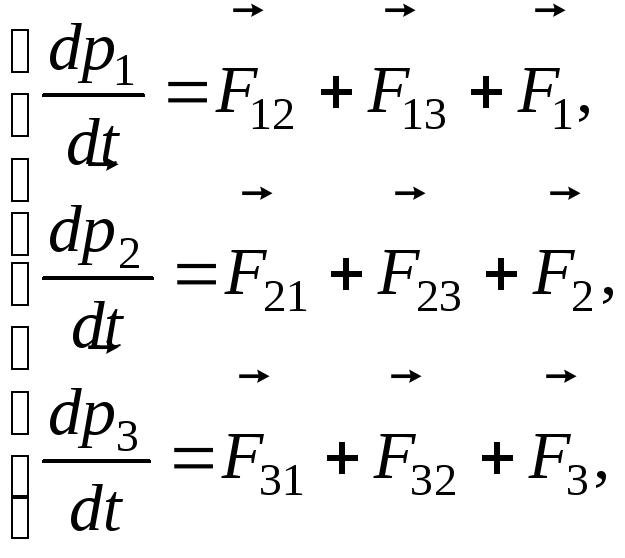 (3.7)
(3.7)
г ![]()
![]()
![]() -
внешние силы.
-
внешние силы.
В уравнениях (3.7) в соответствии с третьим законом Ньютона между внутренними силами имеется связь:
![]() . (3.8)
. (3.8)
Сложим почленно уравнения (3.7) и учтем равенства (3.8), тогда получим
![]() . (3.9)
. (3.9)
Введем
вектор
![]() -
импульс системы материальных точек:
-
импульс системы материальных точек:
![]() . (3.10)
. (3.10)
Из (3.10) следует, что импульсом системы материальных точек называется векторная сумма импульсов материальных точек, входящих в систему.
Правую
часть выражения (3.9) в соответствии с
принципом суперпозиции сил (3.1) заменим
равнодействующей внешней силой
![]() ,
действующей на систему:
,
действующей на систему:
![]() . (3.11)
. (3.11)
С учетом равенств (3.10) и (3.11) уравнение (3.9) запишем в виде
![]() . (3.12)
. (3.12)
Рис.
3.3
![]() и
и![]() равны:
равны:
![]()
![]() .
(3.13)
.
(3.13)
Уравнение (3.12) с учетом (3.13) представляет собой основное уравнение динамики поступательного движения системы n материальных точек (твердого тела).
Покажем, что поступательное движение системы материальных точек (твердого тела) как целого можно отождествить с движением одной точки, называемой центром масс.
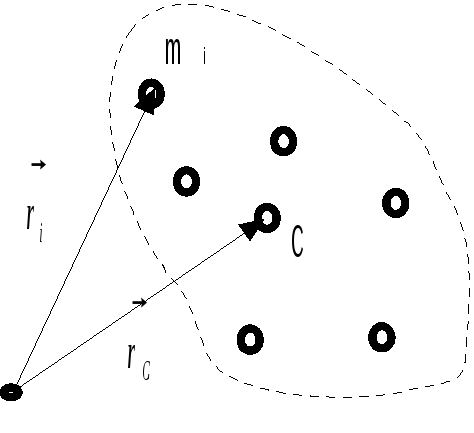
Центром масс (центром инерции) системы материальных точек (тела) называется точка С (рис. 3.3), радиус-вектор которой определяется выражением:
![]() или
или
![]() , (3.14)
, (3.14)
где
![]() и
и![]() - масса и радиус-векторi-ой
материальной точки, n
- число материальных точек в системе, а
- масса и радиус-векторi-ой
материальной точки, n
- число материальных точек в системе, а
![]() ,
- масса всей системы.
,
- масса всей системы.
Продифференцировав (3.14) по времени, получим:
![]() ,
,
откуда с учетом (2.6) находим скорость центра масс:
![]() . (3.15)
. (3.15)
Из (3.2) и (3.13) следует, что выражение (3.15) можно записать в виде
![]() , (3.16)
, (3.16)
где
![]() - импульс системы материальных точек.
- импульс системы материальных точек.
Считая массы частиц системы неизменными, продифференцируем (3.16) по времени и перепишем его с учетом (3.12) в виде
![]() . (3.17)
. (3.17)
Таким образом, из (3.16) и (3.17) следует:
центр масс системы частиц движется как частица с массой, равной массе системы, под действием равнодействующей приложенных к ней внешних сил;
скорость центра масс определяется полным импульсом системы;
движение центра масс можно отождествить с движением системы как целого.