

ГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
Принцип работы электрической машины постоянного тока (МПТ) основан на взаимодействии проводника с током, помещенного в магнитное поле машины, которое создается обмоткой главных полюсов и регулируется током возбуждения iв, протекающим по этой обмотке. Система проводников, уложенных в пазы якоря, образует обмотку якоря, подключенную к коллектору. Вращающийся коллектор, контактирующий со щетками, выполняет функцию механического выпрямителя переменной ЭДС обмотки якоря в постоянное напряжение на выходных клеммах генератора или функцию инвертора постоянного напряжения на входных клеммах двигателя в переменную ЭДС обмотки якоря двигателя.
МПТ может работать как в режиме генератора, так и в режиме двигателя. Это свойство называется обратимостью электрических машин.
Рабочие свойства машин зависят от способа включения обмотки возбуждения (ОВ) главных полюсов. Принципиальные схемы подключения ОВ приведены на рис.13.
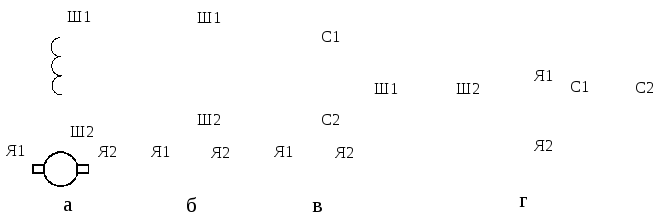
Рис. 13. Электрические схемы подключения обмотки возбуждения:
а – независимое, ОВ питается от отдельного источника постоянного тока; б – параллельное (шунтовое), ОВ подключена непосредственно к зажимам якоря; в – последовательное (сериесное), ОВ включается последовательно с обмоткой якоря; г – смешанное возбуждение, используются оба типа обмотки (сериесная обмотка в этом случае, как правило, играет
вспомогательную роль, а главной является шунтовая ОВ)
Основные свойства генераторов постоянного тока (ГПТ) описываются рабочими характеристиками, к которым относятся характеристика холостого хода Eа = f(iв), нагрузочная Uа = f(iв), внешняя Uа = f(Iа) и регулировочная iв = f(Iа). Все характеристики снимаются при условии постоянной скорости вращения якоря (n = const).
Характеристики, перечисленные выше, можно вывести из основного уравнения равновесия ЭДС ГПТ:
![]() (22)
(22)
где
![]() – ЭДС генератора, В;
– ЭДС генератора, В;
Се = Np/a – постоянная машины;
N – число активных проводников обмотки якоря;
р, а – число пар полюсов и параллельных ветвей;
n – частота вращения якоря, об/мин;
Ф – основной магнитный поток, Вб;
Iа – ток якоря, А;
Rа – сопротивление цепи якоря, Ом (Rа включает в себя сопротивления обмотки якоря, щеточного контакта, а также обмотки дополнительных полюсов, компенсационной обмотки и обмотки последовательного возбуждения, если таковые имеются).
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока (ДПТ) с независимым и последовательным возбуждением получили наибольшее распространение. В курсе «Электрические машины и электропривод» более глубоко изучают электромеханические (скорост-ные), моментные M = f(Iа) и механические n = f(Iа) характеристики ДПТ, а также методы регулирования частоты вращения якоря.
Работа электрической машины в режиме генератора или двигателя различается направлением потока мощности: «вал – сеть» или «сеть – вал». С этой точки зрения при неизменном направлении вращения и магнитного потока главных полюсов основные уравнения равновесия ЭДС (22) будут различаться лишь знаком Iа, т. е.
![]() (34)
(34)
Из соотношения (34) можно вывести уравнение скоростной (внешней) характеристики ДПТ. Действительно, при Eа=cе nФ можно записать:
![]() (35)
(35)
отсюда
 (36)
(36)
Уравнение моментной характеристики можно представить в более прос-том виде:
M = cмIаФ, (37)
где
 – постоянная машины.
– постоянная машины.
Если выразить ток через момент из формулы (37) и подставить его значение в уравнение (36), то получим механическую характеристику:
 (38)
(38)
где n0 – частота вращения идеального х. х.;
![]() –
величина изменения частоты вращения.
–
величина изменения частоты вращения.
Как видно из формул (36) и (37), частота вращения и момент ДПТ существенно зависят от основного магнитного потока. Иначе говоря, рабочие свойства
ДПТ определяются его системой возбуждения, и в частности – зависимостью основного магнитного потока от тока якоря, т. е. от нагрузки на валу ДПТ.
Двигатели постоянного тока параллельного и независимого возбуждения имеют практически одинаковые рабочие свойства и идентичные характеристики. В связи с этим в дальнейшем будем использовать лишь один термин – «параллельное» возбуждение.
Скоростные характеристики ДПТ описываются уравнением (36). Основной магнитный поток Ф при параллельном возбуждении определяется током возбуждения iв. По мере роста нагрузки ток якоря увеличивается и возрастает размагничивающее действие поперечной реакции якоря, т. е. магнитный поток в зазоре машины уменьшается. Характерной особенностью этого процесса является непропорциональность изменения тока якоря и действия реакции якоря вследствие нелинейности кривой намагничивания. Этим и определяется характер зависи-мости частоты вращения от тока якоря (рис. 28).
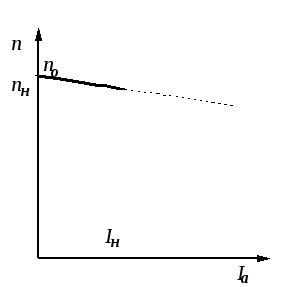
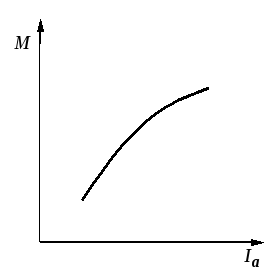
Рис. 28. Скоростная характеристика Рис. 29. Моментная характеристика
При незначительном токе якоря магнитный поток остается практически постоянным и характер кривой n = f(Iа) определяется лишь падением напряжения в цепи якоря IаRа (36). По мере увеличения Iа все более заметно проявляется размагничивающее действие реакции якоря, поток Ф уменьшается и кривая изменения частоты вращения отклоняется от прямолинейной зависимости. При значи-
тельном токе якоря частота вращения может даже увеличиваться и двигатель переходит на неустойчивую часть характеристики, однако такое явление при уста-
новке щеток на линии геометрической нейтрали наблюдается при токе, нам-ного превышающем номинальный.
Моментная характеристика M = f(Iа) при токе якоря в пределах номинального значения практически прямолинейна. При значительном токе также наблюдается отклонение, вызванное явлением, описанным выше (рис. 29).
Механическая характеристика n = f(M) приведена на рис. 30 (кривая 1), она представляет собой наклонную линию.
Обмотка возбуждения двигателей с последовательным возбуждением включена непосредственно в цепь якоря и обтекается током якоря (или некоторой его частью). Таким образом, поток возбуждения главных полюсов изменяется пропорционально изменению тока якоря, т. е. нагрузке двигателя Ф = kаIа, где kа – коэффициент пропорциональности на линейной части кривой намагничивания. В этом случае уравнение скоростной характеристики (36) принима-ет вид:
 (39)
(39)
Из уравнения (39) видно, что частота вращения двигателя с последовательным возбуждением изменяется обратно пропорционально току якоря. Форма характеристики близка к гиперболе (рис. 31).
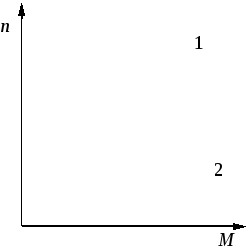
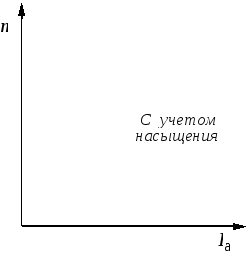
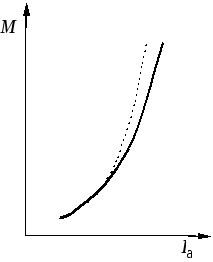
Рис. 30. Механическая Рис. 31. Скоростная Рис. 32. Моментная
характеристика характеристика характеристика
Внимание! При незначительной нагрузке (режим х. х.) частота вращения якоря неограниченно возрастает и двигатель идет «вразнос».
Другой особенностью двигателей с последовательным возбуждением является пропорциональность вращающего момента квадрату тока якоря (рис. 32):
![]() (40)
(40)
Это свойство делает данные двигатели практически незаменимыми в тех случаях, когда требуется при относительно малой мощности получить значительные пусковые моменты.
Механическая характеристика двигателя с последовательным возбуждением приведена на рис. 30 (кривая 2), которая по своему виду близка к гиперболе. Сравнение кривых, представленных на рис. 30, указывает на значительное различие в характеристиках двигателя в зависимости от способа возбуждения.
При выполнении лабораторной работы обратите внимание на отмеченные особенности рабочих характеристик испытуемых двигателей.
Лабораторная работа 11
ИСПЫТАНИЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
С ПОСЛЕДОВАТЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
Ц е л ь р а б о т ы: ознакомиться с конструкцией, схемой включения и особенностями рабочих характеристик двигателей с последовательным возбуждением [1, c. 200 – 211, 217 – 222; 2, c. 261 – 296; 3, c. 170 – 191].
11.1. Основные положения теории
Рассмотрим способы регулирования частоты вращения якоря двигателя.
Одним из способов регулирования частоты вращения двигателей с последовательным возбуждением является ослабление магнитного потока главных полюсов (ослабление возбуждения – ОВ), что достигается шунтированием обмотки возбуждения. Глубина (диапазон) регулирования характеризуется коэффициентом ослабления возбуждения:
 (47)
(47)
или
 (48)
(48)
где rв и rш – сопротивления обмотки возбуждения и шунтирующего ре-зистора;
Iв и Iш – токи в соответствующих ветвях;
Iа – ток якоря двигателя.
Другим способом регулирования частоты вращения является введение в цепь якоря добавочного сопротивления Rд.
11.2. Экспериментальная часть
1) Ознакомиться с рабочим местом, паспортом испытуемого двигателя, схемой включения.
2) Собрать экспериментальную схему, приведенную на рис. 34.
3) Снять естественные (при Rд = 0) скоростные характеристики n = f(Iа) при полном возбуждении (ПВ) (β = 1) и двух режимах ослабления возбуждения (ОВ1, ОВ2).
4) Снять реостатную (при Rд ≠ 0) скоростную характеристику при любом из режимов, названных выше.
5) Произвести измерения сопротивлений участков цепи (rа, rв, Rш1, R ш2), если они не указаны на лабораторном стенде.
11.3. Расчеты и построения
1) Построить в одних координатах все скоростные характеристики.
2) Рассчитать и построить в одних координатах моментные характеристики M = f(Iа) экспериментальных режимов.
3) Построить механические характеристики n = f(M) для режимов ПВ и ОВ (при Rд = 0).
4) Рассчитать коэффициент ослабления возбуждения по уравнению (47) или (48).
5) Оформить отчет и дать ответы на контрольные вопросы.
11.4. Методические рекомендации к проведению исследований
В учебных лабораториях испытываются двигатели стрелочных переводов, их отличительной особенностью является высокое сопротивление обмотки якоря, что позволяет включать двигатели без пусковых реостатов. На приведенной схеме (см. рис. 34) резистор Rд является регулировочным реостатом (может использоваться и как пусковой реостат).
Каждый двигатель соединен с другим подобным ему двигателем, последний при этом используется в качестве нагрузочного генератора с последовательным возбуждением. Если при включении испытуемого двигателя нагрузочный
генератор
не возбуждается, то необходимо изменить
направление вращения и вновь запустить
двигатель. Включая одну – две
ступени нагрузочного реостата
![]() ,
легко определить возбуждается
генератор или не возбуждается.
,
легко определить возбуждается
генератор или не возбуждается.
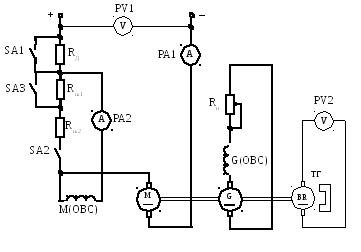 Рис.
34. Электрическая схема экспериментальной
установки
Рис.
34. Электрическая схема экспериментальной
установки
Для оценки частоты вращения испытуемого двигателя с его валом соединен тахогенератор (ТГ). Если ТГ постоянного тока, то к его выводам необходимо подключить вольтметр на 150 – 300 В постоянного тока.
Скоростные характеристики рекомендуется начинать снимать с наибольшей частоты вращения двигателя, нагрузочный реостат при этом полностью отключен. Затем поочередно включаются все ступени реостата. Результаты замеров заносятся в табл. 18.
Рассчитывают значение электромагнитного момента по выражению, Н∙м:
![]() (49)
(49)
где Eа = U – IаRа.
Тогда сопротивление цепи якоря, Ом,
![]() (50)
(50)
Механические характеристики n = f(M) строятся по данным табл. 18 (в табл. 18 должны быть записаны значения для четырех режимов).
Т а б л и ц а 18