

Лабораторная работа 14
ИССЛЕДОВАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Ц е л ь р а б о т ы: ознакомиться с конструкцией асинхронного двигателя с короткозамкнутым ротором, его пуском в ход; изучить методику определения скольжения; снять рабочие характеристики двигателя.
14.1. Основные положения теории
Наиболее широкое применение в качестве привода в современных электротехнических установках имеет асинхронная машина (АМ) переменного тока, она является обратимой и используется как преобразователь электрической энергии в механическую и наоборот, а также в качестве преобразователя частоты. Наибольшее применение АМ находит в режиме асинхронного двигателя (АД). Основными элементами АМ являются статор и ротор. Обмотка статора выполняется трех-, двух- и однофазной – в зависимости от типа машины.
Частота
вращения поля статора (синхронная)
 ,
где
,
где![]() – частота питающего напряжения;
– частота питающего напряжения;![]() – число пар полюсов машины.
– число пар полюсов машины.
При
![]() = 50 Гц получается ряд синхронных частот
вращения (табл. 22).
= 50 Гц получается ряд синхронных частот
вращения (табл. 22).
Соотношение между числом пар полюсов и
синхронной частотой вращения поля
|
|
1 |
2 |
3 |
4 |
5 |
|
|
3000 |
1500 |
1000 |
750 |
600 |
Принцип действия АД заключается в следующем: при включении об-мотки статора АД в трехфазную сеть создается вращающееся магнитное поле, индуктирующее в обмотке ротора ЭДС, под ее действием в замкнутом контуре обмотки ротора протекает ток, который, взаимодействуя с тем же магнитным полем, создает электромагнитный момент, приводящий ротор во вращение вслед за вращением поля.
Ротор
не может достигнуть синхронной частоты
вращения, так как в этом случае
отсутствовало бы пересечение обмотки
ротора с линиями поля, исчезли бы ЭДС,
ток ротора и электромагнитный момент.
Частота вращения ротора определяется
по формуле:
![]() ,
она всегда меньше синхронной частоты
,
она всегда меньше синхронной частоты![]() .
ЭДС в обмотке вращающегося ротора
.
ЭДС в обмотке вращающегося ротора![]() относится к ЭДС неподвижного
относится к ЭДС неподвижного![]() :
:
 ,
(48)
,
(48)
отсюда
![]() и
и![]() ,
где
,
где![]() – частота ЭДС и тока в роторе.
– частота ЭДС и тока в роторе.
Величина
![]() называется скольжением ротора
относительно вращающе-гося поля и
характеризует степень отставания ротора
от вращающегося поля
статора. Скольжение АД может меняться в пределах от 0 до 1 (100 %). При
называется скольжением ротора
относительно вращающе-гося поля и
характеризует степень отставания ротора
от вращающегося поля
статора. Скольжение АД может меняться в пределах от 0 до 1 (100 %). При![]() режим
называется идеальным холостым ходом
машины, при
режим
называется идеальным холостым ходом
машины, при![]() = 1 – ре-жимом короткого замыкания.
Испытательный режим короткого замыкания
может быть получен при подаче пониженного
напряжения на статорную обмотку при
заторможенном роторе
= 1 – ре-жимом короткого замыкания.
Испытательный режим короткого замыкания
может быть получен при подаче пониженного
напряжения на статорную обмотку при
заторможенном роторе![]() .
.
Скольжение,
соответствующее номинальной нагрузке
двигателя, называется номинальным.
Для двигателя нормального исполнения
мощностью от 1 до 1000 кВт номинальное
скольжение равно 0,02 – 0,07. В паспорте
двигателя указываются номинальная
частота вращения ротора (она дает
возможность определить синхронную
частоту вращения, номинальное скольжение
![]() и число полюсов обмотки статора
и число полюсов обмотки статора![]() ),
номинальное напряжение и способ
соединения обмоток статора. Этими
данными необходимо воспользоваться
при сборке схемы двигателя.
),
номинальное напряжение и способ
соединения обмоток статора. Этими
данными необходимо воспользоваться
при сборке схемы двигателя.
АМ
работает в режиме двигателя при скольжении
![]() .
Реже исполь-зуется генераторный режим
(скольжение изменяется в пределах
от 0 до –∞). Третий возможный режим АМ
– электромагнитный тормоз (скольжение
изменяется от 1 до +∞). Двигательный
режим АМ является основным.
.
Реже исполь-зуется генераторный режим
(скольжение изменяется в пределах
от 0 до –∞). Третий возможный режим АМ
– электромагнитный тормоз (скольжение
изменяется от 1 до +∞). Двигательный
режим АМ является основным.
АД конструктивно выполняются в двух вариантах: с короткозамкнутым и фазным ротором. В трехфазном АД обмотки статора соединяются по схеме звезды или треугольника в зависимости от напряжения питающей сети (см. лабораторную работу 12).
Электромагнитный
момент АД создается взаимодействием
тока в об-мотке ротора с вращающимся
магнитным полем
![]() ,
где
,
где![]() –постоянная машины;
–постоянная машины;![]() –
магнитный поток;
–
магнитный поток;![]() –
ток ротора;
–
ток ротора;![]() –
угол между ЭДС обмотки ротора
–
угол между ЭДС обмотки ротора![]() и
и![]() .
Момент пропорционален электромагнитной
мощности и, в конечном итоге, может быть
рассчитан по следующей формуле:
.
Момент пропорционален электромагнитной
мощности и, в конечном итоге, может быть
рассчитан по следующей формуле:
 (49)
(49)
где
![]() – число фаз обмотки статора;
– число фаз обмотки статора;![]() – напряжение сети, В;
– напряжение сети, В;![]() – соот-ветственно активное сопротивление
статора и приведенное сопротивление
ротора, Ом;
– соот-ветственно активное сопротивление
статора и приведенное сопротивление
ротора, Ом;![]() – реактивное сопротивления статора и
ротора, Ом.
– реактивное сопротивления статора и
ротора, Ом.
Зависимость
![]() называется механической характеристикой
двигателя и имеет вид, приведенный на
рис. 39.
называется механической характеристикой
двигателя и имеет вид, приведенный на
рис. 39.
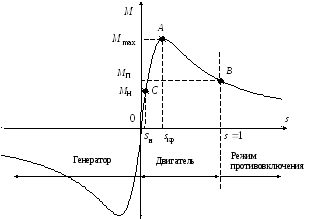
Рис.
39. Механическая характеристика
![]() АМ
АМ
На
механической характеристике (см. рис.
39) можно указать соответствующие
определенному режиму двигателя точки:
0 – идеальный холостой ход двигателя,
достигается при вращении ротора
вспомогательным двигателем с частотой
вращения
![]() ;
С – номинальный режим; А – соот-ветствует
критическому моменту (моменту
опрокидывания) двигателя. При этом
скольжение
;
С – номинальный режим; А – соот-ветствует
критическому моменту (моменту
опрокидывания) двигателя. При этом
скольжение![]() называется критическим, а двигатель
развивает мак-симальный момент.
Незначительное увеличение нагрузки на
валу двигателя выше критической приводит
к переходу по характеристике в точку
В. Точка В – режим пуска двигателя при
называется критическим, а двигатель
развивает мак-симальный момент.
Незначительное увеличение нагрузки на
валу двигателя выше критической приводит
к переходу по характеристике в точку
В. Точка В – режим пуска двигателя при![]() ,
т. е. режим короткого замыкания.
,
т. е. режим короткого замыкания.
Отношение
максимального момента к номинальному
называется перегрузочной способностью,
она определяется по формуле:
 .
.
Анализ
механической характеристики показывает,
что устойчивая работа АД возможна при
скольжении
![]() .
.

Электромагнитный
момент двигателя пропорционален квадрату
приложенного к статору напряжения
![]() ,
и поэтому весьма существенно зависит
от его изменений. В то же время величина
критического скольжения не зависит от
напряжения
,
и поэтому весьма существенно зависит
от его изменений. В то же время величина
критического скольжения не зависит от
напряжения![]() .
Анализ характеристик
.
Анализ характеристик![]() для
различных значений напряжения (рис. 40)
показывает, что снижение напряжения
сети сопровождается изменением не
только момента, но и частоты вращения
ротора, так как изменяется и величина
скольжения. При заметном уменьшении
напряжения
для
различных значений напряжения (рис. 40)
показывает, что снижение напряжения
сети сопровождается изменением не
только момента, но и частоты вращения
ротора, так как изменяется и величина
скольжения. При заметном уменьшении
напряжения![]() (до
30 %) момент двигателя уменьшается
более чем вдвое. Это приводит к тому,
что двигатель не в состоянии работать
при номинальной нагрузке на валу и
останавливается.
(до
30 %) момент двигателя уменьшается
более чем вдвое. Это приводит к тому,
что двигатель не в состоянии работать
при номинальной нагрузке на валу и
останавливается.
Свойства АД характеризуются его рабочими характеристиками (рис. 41)![]() при
при![]() и
и![]() ,
которые могут быть получены расчетным
и опытным путем. В лабораторных условиях
рабочие характеристики снимаются на
установке, где двигатель нагружают с
помощью нагрузочного генератора
постоянного тока. Для двигателей средней
и большой мощности рабочие характеристики
можно построить по круговой диаграмме.
,
которые могут быть получены расчетным
и опытным путем. В лабораторных условиях
рабочие характеристики снимаются на
установке, где двигатель нагружают с
помощью нагрузочного генератора
постоянного тока. Для двигателей средней
и большой мощности рабочие характеристики
можно построить по круговой диаграмме.
Р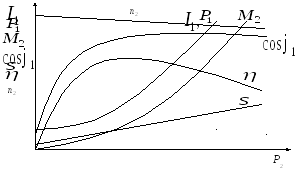 ис.
41. Рабочие характеристика АД
ис.
41. Рабочие характеристика АД
При
снятии рабочих характеристик необходимо
измерить частоту вращения ротора
![]() по одному из методов:
по одному из методов:
с использованием тахометра;
с применением тахогенераторов;
измерением
скольжения
![]() .
.
Последний
способ позволяет с высокой точностью
определить
![]() по формуле:
по формуле: .
.
Для определения скольжения существуют различные способы.
Стробоскопический
метод,
примененный в данной работе, заключается
в том, что в ходе эксперимента измеряется
разница значений частоты вращения:
![]() .
На валу двигателя укрепляется диск,
разделенный на одинаковые темные и
светлые секторы. При этом число темных
секторов должно быть равно числу полюсов.
Если этот вращающийся диск осветить
неоновой лампой, получающей питание от
той же сети переменного тока, что и
двигатель, то будет наблюдаться вращение
диска с частотой
.
На валу двигателя укрепляется диск,
разделенный на одинаковые темные и
светлые секторы. При этом число темных
секторов должно быть равно числу полюсов.
Если этот вращающийся диск осветить
неоновой лампой, получающей питание от
той же сети переменного тока, что и
двигатель, то будет наблюдаться вращение
диска с частотой![]() ,
равной отставанию ротора от магнитного
поля статора. Причина такого явления
объясняется тем, что газосветная лампа
мерцает с частотой сети, вспыхивая
каждый раз при пе-реходе напряжения
через максимум, т. е. 100 раз в секунду.
Если двигатель
че-тырехполюсный, то частота вращения поля статора
,
равной отставанию ротора от магнитного
поля статора. Причина такого явления
объясняется тем, что газосветная лампа
мерцает с частотой сети, вспыхивая
каждый раз при пе-реходе напряжения
через максимум, т. е. 100 раз в секунду.
Если двигатель
че-тырехполюсный, то частота вращения поля статора об/мин.
об/мин.
За
промежуток времени t,
равный
1/100
с, вектор поля статора поворачивается
на угол
![]() (
(![]() оборота).
Если бы ротор вращался с частотой
вращения
оборота).
Если бы ротор вращался с частотой
вращения![]() ,
то в период вспышки лампы темные секторы
замещались бы один другим и мнимое
изображение казалось бы неподвижным.
Однако ротор не успевает за 1/100 с
повернуться на 1/4 оборота. Таким образом,
будет казаться, что изображение секторов
вращается в обратную сторону с частотой
вращения
,
то в период вспышки лампы темные секторы
замещались бы один другим и мнимое
изображение казалось бы неподвижным.
Однако ротор не успевает за 1/100 с
повернуться на 1/4 оборота. Таким образом,
будет казаться, что изображение секторов
вращается в обратную сторону с частотой
вращения![]() .
Подсчитав за некоторый промежуток
времени число оборотов какого-либо
сектора, можно определить скольжение
.
Подсчитав за некоторый промежуток
времени число оборотов какого-либо
сектора, можно определить скольжение  и частоту вращения ротора двигателя
и частоту вращения ротора двигателя![]()