

L03-Динамика, законы сохранения
.pdfЗдесь U - имеет размерность энергии и называется
потенциальной энергией частицы во внешнем поле консервативных сил. E – полная механическая энергия частицы. Она постоянна.
Величину |
|
U |
|
можно определять |
с |
|
|
|
al |
||||||||||||||||
|
|
точностью |
до |
||||||||||||||||||||||
неизвестной |
аддитивной |
постоянной |
|
i |
|
|
|||||||||||||||||||
U0, поскольку |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
||
это никак не повлияет на результат вычисления силы. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
Получим связь U |
|
|
|
|
|
|
de |
|
|
|
|
||||||||||||||
с силой. Мы знаем, что работа на |
|||||||||||||||||||||||||
пути ds равна dA = Fds = Fxdx , если движение идет |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
вдоль оси Х. Приравняем эту работу убыли |
|||||||||||||||||||||||||
потенциальной энергии |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
dA = Fxdx = −dU (см. |
A12 =U1 −U2 ) |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
Отсюда Fx |
= − dU |
|
|
|
on |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dUy |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если есть движение и по другим направлениям, то |
|||||||||||||||||||||||||
F = − dU |
, |
F = − |
dy |
F = − dU |
и |
F = - dU e |
|
- dU e |
|
- dU e |
z , |
||||||||||||||
x |
|
dx |
|
y |
|
|
|
z |
|
dz |
|
dx |
x |
dy |
xy |
dz |
|
||||||||
что может быть переписано как |
F=-ÑU(x,y,z) , |
где |
|||||||||||||||||||||||
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Ñ = - |
d |
e |
|
- |
d |
e - |
d |
e |
|
- оператор набла – он выполняет |
|||||||||||||||
o |
|
pan |
|
|
|||||||||||||||||||||
|
|
dx |
|
x |
|
|
dy |
y |
|
|
dz |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
операцию градиента. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Итак, сила равна градиенту потенциальной энергии с |
|||||||||||||||||||||||||
Cотрицательным знаком. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Конкретный вид функции U зависит от характера силового поля. Найдем потенциальную энергию частицы в поле силы тяжести. Работа на участке 1-2
равна |
A12 = mg(h1 − h2 ) = U1 −U2 |
|
|
|
|
al |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Это означает, что U = mgh , где h отсчитывается от |
||||||||||||||||
произвольного уровня. |
|
|
|
|
|
|
|
|
|
i |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|||
Пусть |
на частицу |
кроме |
|
|
|
|
n |
|
|
сил |
||||||
|
консервативных |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
de |
|
|
|
Тогда |
|||
действуют еще и неконсервативная сила F*. |
|
|||||||||||||||
работа |
на |
участке |
|
i |
1-2 |
|
|
|
равна |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
A =U −U |
2 |
+ A |
= T |
−T |
|
|
|
|
Поскольку |
|||||||
12 |
1 |
12 |
|
2 |
|
1 |
|
|
|
|||||||
|
|
|
E2 − E1 = |
on |
−U1 |
|
и если T2 = T1 , |
|||||||||
T +U = E , то |
|
A12 |
= U2 |
|
||||||||||||
то работа неконсервативных сил идет на приращение |
||||||||||||||||
потенциальной энергии. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
Если система состоитCиз N невзаимодействующих |
||||||||||||||||
частиц находящихся в поле консервативных сил, то |
||||||||||||||||
для каждой |
частицы |
Ti +Ui |
= Ei = consti |
|
и |
|
после |
|||||||||
суммирования |
|
получаем E = const . |
Это |
означает |
||||||||||||
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аддитивность полной механической энергии системы |
||||||||||||||||
невзаимодействующихpan |
частиц в поле консервативных |
|||||||||||||||
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сил и выражает закон сохранения энергии для |
||||||||||||||||
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
невзаимодействующих частиц. |
|
|
|
|
|
|
|
|
|
|
||||||
При наличии в системе сил, чья работа отрицательна,
полная механическая энергия системы уменьшается переходя в немеханические формы энергии
|
(например, во внутреннюю, в тепло). |
Такой процесс |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
al |
|
|
|
называется диссипацией (рассеянием) энергии, а силы |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
к этому приводящие – диссипативны. Строго говоря, |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
||
|
все системы в природе являются диссипативными. |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
||
|
§ 24. Потенциальная энергия взаимодействия |
|
|
||||||||||||||||
|
Пусть |
|
теперь |
|
система |
состоит |
из |
двух |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
F |
|
= -F |
|
|
|
|
взаимодействующих |
|
частиц |
i |
|
по |
|||||||||||||
|
|
с силойde12 |
|
21 |
|||||||||||||||
|
третьему |
закону |
|
Ньютона. Расстояние между |
|||||||||||||||
|
частицами R12 |
|
|
|
C |
r2 |
и r1 - радиусы-векторы |
||||||||||||
|
= r2 -r1 |
, где |
|||||||||||||||||
|
частиц. |
Пусть |
силы |
зависятonтолько |
от |
расстояния |
|||||||||||||
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|||
|
между частицами и направлены вдоль прямой |
||||||||||||||||||
|
соединяющей |
|
|
частицы |
|
|
(гравитационное |
или |
|||||||||||
|
|
pan |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
кулоновское взаимодействие). |
|
|
|
|
|
|
||||||||||||
|
Тогда F12 |
= f (R12 )e12 |
и F21 = − f (R12 )e12 |
|
|
|
|
|
|
||||||||||
|
Если система замкнута и нет внешних сил, то |
||||||||||||||||||
|
уравнения движения |
|
|
|
|
|
|
|
|
|
|
|
|||||||
C |
m v& |
= F |
|
m v& |
|
= F |
|
|
|
|
|
|
|
|
|
||||
1m1 |
12 |
и |
|
2 |
2 |
|
|
21 |
|
|
|
|
|
|
|
|
|
||
o |
|
|
|
|
|
|
на |
dr = v dt |
и |
|
dr = v |
dt |
, |
||||||
|
Умножаем их |
|
|
1 |
1 |
|
2 |
2 |
|
||||||||||
соответственно, и складываем.
Получаем m1v1v&1dt + m2 v2 v&2dt = F12dr1 + F21dr2 = dAвнутр
Слева стоит приращение кинетической энергии, справа работа внутренних сил за это время.
Подставим |
силы |
и |
получим |
dAвнутр = F12dr1 + F21dr2 |
= f (R12 )e12dr1 − f (R12 )e12dr2 |
= − f (R12 )e12dR12 |
|
или dAвнутр = − f (R12 )dR12 = dU (R12 )
|
|
|
|
|
|
al |
В результате получаем, что приращение кинетической |
||||||
|
|
|
|
|
i |
|
энергии dT равно работе внутренних сил dAвнутр |
за это |
|||||
|
|
|
|
|
n |
|
время или dT= - dU. |
|
t |
||||
Последнее означает, что d(T+ U)= dE=0 или |
|
|||||
E=T+U для рассматриваемой системы |
сохраняется. |
|||||
|
|
|
|
f |
|
|
Здесь функция U (R12 ) - потенциальная энергия |
||||||
взаимодействия частиц и она зависитideот расстояния |
||||||
между частицами. |
on |
|
|
|||
|
|
|
||||
|
|
§ 25. Закон сохранения энергии |
|
|||
|
|
y |
|
|
|
|
Cведем все результатыCвместе и получим закон |
||||||
|
|
pan |
|
|
|
|
сохранения энергии. Для этого рассмотрим систему |
||||||
из N материальных точек c массами m1, m2, …mN, |
||||||
движущихся со скоростями v1, v2, … vN. Пусть |
||||||
частицы взаимодействуют друг с другом с силами Fik, |
||||||
|
m |
|
|
|
||
модули которых зависят только от расстояния Rik |
||||||
между частицами. Такие силы консервативны. Кроме |
||||||
o |
|
|
|
|
|
|
внутренних сил на каждую частицу i действует |
||||||
C |
|
|
|
|
и внешняя |
|
внешняя консервативная сила Fi |
||||||
неконсервативная сила Fi*. Тогда уравнение движения |
||||||
i частицы имеет вид уравнения второго закона |
||||||
Ньютона: |
|
|
|
|||
|
|
|
dvi |
N |
|
|
|
|
mi |
= å Fik + Fi + F*i |
|
|
|
|
|
dt |
|
|
||
|
|
|
k =1(k ¹i) |
|
|
|
Умножаем уравнение на dsi = dri = vidt и складываем все N уравнений (индексы суммирования)
åmi vidvi = å |
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
( å Fik )dri + åFi dsi + åF*i dsi |
|
|
||||||||||||||||
i |
|
|
i |
k =1(k ¹i) |
|
|
i |
|
|
|
i |
|
|
|
|
|
||
Левая часть |
– |
приращение |
кинетической энергии |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
m v 2 |
|
|
|
|
|
al |
||
системы |
åmi vidvi = då |
|
i i |
|
= dT |
|
|
i |
||||||||||
i |
|
|
|
i |
|
|
|
2 |
|
|
|
|
|
n |
|
|||
Первый |
член |
правой |
|
|
|
части |
– |
|
|
|||||||||
|
|
|
|
равенtубыли |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
de |
|
|||
потенциальной энергии взаимодействия частиц |
|
|||||||||||||||||
|
|
N |
|
|
|
N |
|
|
|
|
|
|
i |
N |
|
|
||
å ( |
å |
Fik )dri |
= − å Fik dRik |
|
= − |
|
å Uik (Rik ) = −dUвзаим |
|||||||||||
i |
|
k=1(k¹i) |
|
|
k=1(k¹i) |
|
|
|
|
f |
=1(k¹i) |
|
||||||
|
|
|
on |
k |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Второй член правой части – равен убыли |
||||||||||||||||||
потенциальной |
энергии |
системы |
во |
внешнем поле |
||||||||||||||
i |
|
|
i |
|
|
C |
|
|
|
|
|
|
|
|
|
|||
консервативных сил |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
åFidsi = d åUi |
(ri ) = −dU |
внешн |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pan |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Третий член правой части – работа неконсервативных |
||||||||||||||||||
внешних сил |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
åF idsi |
= ådA i = dA внешн |
|
|
|
|
|
|
|
||||||||||
i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
|
d(T +U +U ) = dA |
|
|||||||||||||
C |
m |
|
|
|
||||||||||||||
|
|
|
|
|
|
взаим |
|
внешн |
|
|
|
внешн |
|
|||||
Таким образом |
|
|
|
|
|
|
|
|||||||||||
где |
T +Uвзаим +Uвнешн = E |
|
|
|
есть полная |
механическая |
||||||||||||
энергия системы.
Если внешние неконсервативные силы отсутствуют,
то правая часть формулы будет равна нулю и полная энергия системы остается постоянной
T +Uвзаим +Uвнешн = E = const
Закон сохранения механической энергии: полная
|
механическая энергия системы, на которую |
||||||||||
|
действуют только консервативные силы, остается |
||||||||||
|
постоянной. |
|
|
|
|
|
|
ial |
|||
|
Для замкнутой системы T +Uвзаим |
|
t |
|
|||||||
|
= E = co st |
|
|||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
При движении тела в замкнутой консервативной |
||||||||||
|
системе |
происходит |
непрерывное |
превращение |
|||||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
de |
и обратно |
||
|
кинетической его энергии в потенциальнуюf |
||||||||||
|
в эквивалентных количествах, так что полная энергия |
||||||||||
|
остается |
неизменной. |
|
Закон |
сохранения |
и |
|||||
|
превращения |
энергии |
- фундаментальный закон |
||||||||
|
природы, |
он |
|
|
on |
|
для |
систем |
|||
|
|
справедлив как |
|||||||||
|
|
|
|
|
C |
|
|
|
|
|
|
|
микроскопических тел, так и для систем микротел. |
|
|||||||||
|
|
|
|
y |
|
|
|
|
|
|
|
|
В замкнутой системе, в которой действуют силы |
||||||||||
|
трения, полная механическая энергия системы при |
||||||||||
|
движении убывает. Следовательно, в этих случаях |
||||||||||
|
закон |
|
сохранения |
|
механической |
энергии |
|||||
|
|
pan |
Однако |
при |
|
«исчезновении» |
|||||
|
несправедлив. |
|
|
||||||||
|
механическойm |
|
энергии |
всегда |
возникает |
||||||
oэквивалентное количество энергии другого вида. |
|||||||||||
C |
|
|
|
|
|
|
|
|
|
|
|
Таким образом, энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой.
|
|
|
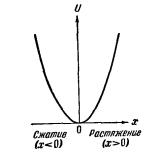
§ 26. Энергия упругой деформации |
|
||||
|
В случае отдельно взятого упруго деформированного |
|||||||
|
тела потенциальной энергией обладают ее части. Эта |
|||||||
|
энергия |
зависит |
от взаимного |
расположения |
||||
|
отдельных ее частей. |
|
|
al |
||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
t |
|
|
Для деформирования пружины необходимо затратить |
|||||||
|
|
|
2 |
2 |
|
|
n |
|
|
работу |
|
A = kx |
, |
которая идет |
de |
|
|
|
|
|
|
на увеличение |
||||
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
f |
|
|
|
|
потенциальной энергии пружины U = kx2 . |
|
||||||
|
|
|
|
|
on |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
pan |
|
|
|
|
||
|
m |
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|

§ 27. Условия равновесия механической системы
Рассмотрим случаи, когда взаимное расположение тел
системы может быть определено с помощью только |
|||||||
одной величины, например координаты х. В качестве |
|||||||
|
|
|
|
|
|
|
al |
примера можно привести шарик, скользящий без |
|||||||
|
|
|
|
|
|
i |
|
трения по укрепленной неподвижно изогнутой |
|||||||
проволоке |
(рис. |
а). На |
|
шарик |
|
действует |
|
консервативная сила тяжести |
|
|
n |
|
|||
|
de |
t |
|||||
|
|
|
i |
|
|
|
|
|
|
f |
|
|
|
||
|
|
on |
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
y |
|
|
|
|
|
|
pan |
|
|
|
|
|
|
|
График потенциальной энергии как функции U(x) |
|||||||
показан на рис. б. |
|
|
|
|
|
|
|
Поскольку шарик движется без трения, то сила, |
|||||||
C |
на него со стороны |
|
проволоки, |
||||
действующаяm |
|
||||||
oперпендикулярна к |
скорости |
шарика и |
работы не |
||||
совершает. Имеет место сохранение энергии
E=T+U=const.
|
Кинетическая энергия может возрасти только за счет |
||||||
|
убыли потенциальной. Поэтому если скорость шарика |
||||||
|
равна нулю, а потенциальная энергия минимальна, то |
||||||
|
он будет находиться в состоянии равновесия – без |
||||||
|
воздействия со |
стороны он не сможет |
прийти в |
||||
|
движение. |
|
|
|
|
|
al |
|
|
dU |
|
|
|
i |
|
|
|
|
|
t |
|||
|
Минимумам U соответствуют значения х, равные х0 . |
||||||
|
В этом случае dx |
= 0 |
n |
|
|||
|
, что равнозначно Fx |
= |
0 . |
|
|||
|
Таким |
образом, |
de |
|
системы, |
||
|
f |
|
|||||
|
конфигурация |
|
|||||
|
соответствующая минимуму потенциальнойi |
энергии, |
|||||
|
обладает тем свойством, что силы, действующие на |
||||||
|
тела системы, равны нулю. Этот результат остается |
||||||
|
|
|
|
C |
|
|
|
|
справедливым и в общем случае, когда U является |
||||||
|
функцией нескольких переменныхon . |
|
|
|
|||
|
|
y |
|
|
|
||
|
В случае, изображенном на рис. условие равенства |
||||||
|
нулю потенциальной энергии также для х, равного х0’ |
||||||
|
(т. е. для максимума). Определяемое этим значением |
||||||
|
х положение шарика также будет равновесным. |
||||||
|
m |
|
|
|
|
|
|
|
Однако это равновесие в отличие от равновесия при х |
||||||
|
= х0 будетpanнеустойчивым: достаточно слегка вывести |
||||||
o |
|
|
|
|
|
|
|
C |
шарик из этого положения, как возникает сила, |
||||||
которая будет удалять шарик от положения х0. Силы,
возникающие при смещении шарика из положения устойчивого равновесия (для которого х = х0), направлены так, что стремятся вернуть шарик в положение равновесия.
Зная вид функции, которой выражается потенциальная энергия системы, можно сделать ряд заключений о характере движения системы.
Если полная энергия системы |
имеет |
значение, |
||
соответствующее |
проведенной |
на |
|
al |
графике |
||||
|
|
|
i |
|
горизонтальной черте, то система может совершать |
||||
движение либо в пределах от х0 до x2 или в пределах |
||||
|
|
n |
|
|
от х3 до бесконечности. В область х < x1 и tх2 < х < х3 |
||||
|
|
de |
|
|
система проникнуть не может, так как потенциальная |
||||
энергия не может стать больше полной энергии (если |
||
бы это случилось, то кинетическая энергия стала бы |
||
|
|
f |
отрицательной). |
|
i |
Таким образом, область х2< х <х3 представляет собой |
||
|
|
C |
потенциальный барьер, через который система не |
||
может проникнуть, имеяonданный запас полной |
||
энергии. |
y |
|
|
|
|
§ 28. Закон сохранения количества движения |
||
m |
|
(импульса) |
|
|
|
Найдем еще одну аддитивную сохраняющуюся |
||
величинуpanдля замкнутой механической системы. |
||
o |
|
|
Рассмотрим механическую систему, состоящую из N |
||
C |
|
частиц, масса и скорость |
взаимодействующих |
||
которых соответственно равны m1, m2, … mn, и v1, v2, … vn. Пусть Fik внутренние силы, действующие на i частицу. Равнодействующая всех внешних сил приложенных к частице Fi. Запишем второй закон Ньютона для каждой частицы механической системы: