

L01-Кинематика
.pdfМеханика
|
|
|
Лекция 01 |
|
|
|
|
Введение |
i |
|
|
|
|
|
|
Глава 1. Кинематика поступательного движения |
|||
|
|
|
|
t |
|
§ 1. Система отсчета. Траектория материальнойal |
|||
|
точки....................................................................................................................................... |
|
n . |
|
|
§ 2. Вектора |
|
||
|
§ 3. Скорость................................................................................................................. |
i . |
||
|
|
|
||
|
|
|
f |
|
|
§ 4. Ускорение и его составляющие................................................... |
|||
|
|
|
on |
|
|
§ 5. Прямолинейное равнопеременноеdeдвижение |
|||
|
§ 6. Ускорение при криволинейном движении |
|||
|
§ 7. Кинематика вращательного движения. |
|||
|
|
|
C |
|
|
Угловая скорость и угловое ускорение |
|||
|
|
|
y |
|
|
|
|
Введение |
|
|
Механика — часть физики, которая изучает |
|||
|
простейшую и наиболее общую форму движения |
|||
|
материи, заключающуюся в перемещении тел или |
|||
|
m |
|
|
|
|
частей тела относительно друг друга и называемую |
|||
|
механическимpanдвижением. |
|
||
o |
|
|
|
|
C |
|
Развитие механики как науки начинается с III в. |
||
|
|
|||
|
до н. э., когда древнегреческий |
ученый Архимед |
||
сформулировал закон равновесия рычага (на нем основано устройство всех машин) и законы равновесия плавающих тел. Основные законы
механики в значительной мере выяснены итальянским
физиком и астрономом Галилеем и окончательно сформулированы английским ученым Ньютоном.
|
Механика Галилея — Ньютона называется |
||||||||
|
классической |
и |
изучает |
|
законы |
движения |
|||
|
макроскопических тел, скорости которых малы по |
||||||||
|
сравнению со скоростью света. Законы движения |
||||||||
|
макроскопических тел со скоростями, сравнимыми со |
||||||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
al |
|
|
скоростью света, изучаются специальнойtтеорией |
||||||||
|
относительности, сформулированной А.Эйнштейном. |
||||||||
|
|
|
|
|
|
n |
|
|
|
|
Для |
описания |
движения |
микроскопических |
тел |
||||
|
(атомы |
и |
элементарные |
iчастицы) |
|
законы |
|||
|
|
|
|
|
|
de |
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
классической механики не применимы — они |
||||||||
|
изучаются квантовой механикой. |
|
|
|
|
||||
|
Механика подразделяется на три раздела: кинематику; |
||||||||
|
динамику; статику. |
on |
|
|
|
|
|||
|
Кинематика |
C |
движение |
тел, |
не |
||||
|
изучает |
||||||||
|
|
|
y |
|
|
|
|
|
|
|
рассматривая те причины, которые это движение |
||||||||
|
обусловливают. |
|
|
|
|
|
|
|
|
|
Динамика изучает законы движения тел и те |
||||||||
|
причиныpan, которые вызывают или изменяют это |
||||||||
|
движение. |
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
|
|
|
C |
Статика изучает законы равновесия системы тел. |
||||||||
|
|
|
|
|
|
|
|
|
|
Глава 1. Кинематика поступательного движения
|
§ 1. Система отсчета. Траектория материальной |
||||||
|
|
|
|
точки |
|
al |
|
|
|
|
|
|
|
|
|
Наиболее |
простым |
примером |
i |
||||
механического |
|||||||
движения является движение материальной |
точки. |
||||||
Материальная |
точка |
— |
|
n |
|
||
это тело, обладающееt |
|||||||
|
|
|
|
|
|
de |
|
массой, размерами которого в данной задаче можно |
|||||||
пренебречь по сравнению со всеми другими |
|||||||
размерами встречающимися в поставленной задаче. |
|||||||
|
|
|
|
|
f |
|
|
Движение |
тел |
происходит |
в iпространстве |
и во |
|||
времени. Поэтому для описания движения |
|||||||
материальной |
точки надо |
знать, |
в каких |
местах |
|||
|
|
|
C |
|
|
|
|
пространства эта точка находилась и в какие моменты |
|||||||
времени |
она проходилаonто или иное место. |
||||||
|
|
|
y |
|
|
|
|
Положение материальной точки определяется по |
|||||||
отношению к какому-либо другому, произвольно |
|||||||
выбранному телу, называемому телом отсчета. |
|||||||
Выбранное таким образом тело условно считается |
|||||||
неподвижным, а связанная с ним произвольная |
|||||||
|
m |
|
|
|
|
|
|
система координат называется системой отсчета |
|||||||
положенийpanматериальной точки. |
|
|
|||||
o |
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
В декартовой системе координат положение точки А |
|||||||
в данный |
момент времени |
по отношению |
к этой |
||||
системе характеризуется тремя координатами x, у и z или радиусом-вектором r, проведенным из начала отсчета в данную точку (рис. 1).
|
Z |
|
A |
|
|
|
|
|
|
|
|
r |
z |
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
ial |
|
|
Рис.1 |
|
|
|
|
|
|||
|
0 |
|
y |
|
|
|
|
|
|
|
|
x |
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S B |
|
|
|
|
de |
|
|
Z |
A |
|
|
|
i |
n |
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
r0 |
r |
|
|
|
f |
|
|
|
|
r |
|
|
on |
|
|
||
|
0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
Y |
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2 |
|
|
|
|
|
|
|
|
При движении материальной точки ее координаты |
||||||||
|
|
pan |
|
|
|
|
|
||
|
с течением времениyизменяются. В общем случае ее |
||||||||
|
движение |
определяется |
тремя |
скалярными |
|||||
|
уравнениями: |
|
|
|
|
|
|
||
|
|
|
ìx = x (t), |
|
|
|
|
||
|
|
|
ï |
|
|
|
|
|
(1.1) |
o |
|
íy = y (t), |
|
|
|
||||
|
ï |
|
= z (t), |
|
|
|
|
||
|
|
|
îz |
|
|
|
|
||
C |
эквивалентнымиm |
векторному уравнению: |
|
||||||
|
|
r = r (t). |
|
|
|
(1.2) |
|||
|
|
|
|
|
|
||||
Число независимых координат, полностью определяющих положение точки в пространстве,
называется числом степеней свободы. Если
|
материальная точка движется в пространстве, то, как |
|||
|
уже было сказано, она обладает тремя степенями |
|||
|
свободы (координаты х, у и z), если по некоторой |
|||
|
поверхности, то двумя степенями свободы, если по |
|||
|
кривой, то одной степенью свободы. |
al |
||
|
|
|
||
|
|
i |
|
|
|
|
n |
|
|
|
|
Исключая t в уравнениях (1.1) и (1.2),tполучим |
||
|
|
de |
|
|
|
уравнение траектории движения материальной точки. |
|||
|
Траектория движения материальной точки — линия, |
|||
|
описываемая этой точкой в пространстве. |
В |
||
|
|
f |
|
|
|
зависимости от формы траекторииiдвижение может |
|||
|
быть прямолинейным или криволинейным. |
|
|
|
|
|
C |
|
|
|
|
Рассмотрим движение материальной точки вдоль |
||
|
произвольной траекторииon(рис. 2). Отсчет времени |
|||
|
|
y |
|
|
|
начнем с момента, когда точка находилась в |
|||
|
положении А. Длина участка траектории АВ, |
|||
|
пройденного материальной точкой с момента начала |
|||
|
отсчета времени, называется длиной пути |
s |
и |
|
|
является скалярной функцией времени: s = s (t). |
|
||
|
m |
|
|
|
|
|
Вектор r = r — r0, проведенный из начального |
||
|
положенияpanдвижущейся точки в положение ее в |
|||
o |
|
|
|
|
C |
данный момент времени, называется перемещением. |
|||
|
Естественно, что при прямолинейном движении |
|||
|
|
|||
|
вектор перемещения совпадает с соответствующим |
|||
|
участком траектории и модуль перемещения |
| |
r | |
|
|
равен пройденному пути s. |
|
|
|
|
|
Имеет место два основных вида движения – |
||
|
поступательное и вращательное. |
|
|
|
Поступательное – это движение при котором
любая прямая линия на теле остается параллельной самой себе. При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной прямой – оси вращения.
|
|
i |
|
§ 2. Вектора |
|
|
al |
|
t |
||
|
n |
|
|
Вектор – это величина, характеризуемая численным |
|||
значением и направлением и складывается с другими |
|||
по правилу параллелограмма. i |
|
|
|
|
de |
|
|
f |
|
|
|
Векторы направленные вдоль параллельных прямых |
||||||
называются коллинеарными. Векторы лежащие в |
||||||
параллельных |
|
плоскостяхon |
называются |
|||
компланарными. Параллельным переносом, первые |
||||||
|
|
|
C |
|
|
|
могут быть сведены на одну прямую, вторые - на одну |
||||||
|
|
|
y |
|
|
|
плоскость. Два любых вектора всегда компланарны. |
||||||
Единичный вектор e (орт) определяет направление |
||||||
|
pan |
|
|
|
||
вектора. |
e |
=1 |
|
|
|
|
m |
|
|
|
|
||
Умножение вектора на скаляр: b = αa |
|
|||||
o |
|
|
|
|
|
|
CЛинейная |
зависимость |
между |
векторами: |
|||
d = αa + βb + γ c
Проекция вектора на ось l: al = a cosϕ
Выражение вектора a через его |
проекции |
на |
координатные оси: a = axex + ayey + azez . |
Здесь ax ,ay ,az |
- |
компоненты вектора. |
|
|
Скалярное произведение: ab = ab cosϕ |
|
|
|
al |
||||||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
Векторное произведение: |
c = nabsinϕ = a×b = [ab] |
|
||||||||||||
|
|
|
|
|
i |
|
||||||||
Смешанное |
произведение: |
a[bc] = c[ab] = b[ac] |
- |
|||||||||||
циклическая перестановка. |
|
f |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Двойное векторное произведение:de |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
i[a[bc]] = b(ac) − c(ab) |
|||||
Производная |
|
|
on |
+ ay (t)ey + az (t)ez |
||||||||||
|
вектора: |
|
a(t) = ax (t)ex |
|||||||||||
равна a&(t) = a&x (t)ex |
|
C |
|
|
|
|
|
|
|
|||||
+ a&y (t)ey |
+ a&z |
(t)ez |
|
|
|
|
|
|
|
|||||
|
|
|
y |
|
|
|
|
|
|
|
|
|
||
Для радиуса-вектора r(t) движущейся точки получаем |
||||||||||||||
|
|
pan |
+ z&(t)ez |
|
|
|
|
|
|
|
|
|
||
r&(t) = x&(t)ex + y&(t)ey |
|
|
|
|
|
|
|
|
|
|||||
Дифференциал |
|
векторов: |
|
da = daxex + dayey + dazez |
и |
|||||||||
|
|
m |
+ dzez |
|
|
|
|
|
|
|
|
|
|
|
dr = dxex + dyey |
|
|
|
|
|
|
|
|
|
|
||||
Поскольку df = |
f dt′ и |
f |
≈ f ′ |
|
t , то a ≈ |
|
da |
t |
|
|
||||
|
|
dt |
|
|
||||||||||
C |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
произведения |
|
|
функций: |
||||||||
oПроизводная |
|
|
|
|||||||||||
|
d |
(ϕa) = ϕ da |
+ a dϕ = ϕa& |
+ϕ&a |
|
|
|
|
|
|
|
|||
|
dt |
|
|
|
|
|
|
|
||||||
|
dt |
|
dt |
|
|
|
|
|
|
|
|
|
||

dtd [ab] = [ab&] +[ab& ]
|
|
|
|
|
|
|
|
al |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
de |
|
|
|
|
|
|
|
i |
|
|
||
|
|
|
|
f |
|
|
|
|
Производная единичного вектора: |
|
|
|
|||||
|
|
|
|
on |
|
|
|
|
|
|
C |
|
|
|
|
||
|
y |
|
|
|
|
|
|
|
pan |
|
ϕ |
|
t |
|
|
|
|
Рассматривается орт |
ea |
вектора a . Он единичный и |
||||||
может меняться только по направлению. Пусть он |
||||||||
m |
|
|
за время |
|
. Его приращение |
|||
повернулся на угол |
|
|
||||||
по размеру равно |
ea ≈ |
ϕ . Сам вектор приращения |
||||||
C |
|
|
» Dϕ ×e e . |
|
|
e e - орт |
||
oравен |
Dea = Dea |
×e e |
Здесь |
|||||
вектора |
ea . При вращении для малого угла ϕ этот |
|||||||
орт совпадет с перпендикуляром к ea , |
т. е. станет |
|||||||
e . |
|
|
|
|
|
|
|
|

Искомая производная орта равна
|
|
dea |
|
= lim t→0 |
ea |
= lim t→0 |
ϕ e |
a = |
dϕ |
e |
или |
|
|||||||||
|
|
dt |
|
|
|||||||||||||||||
|
|
|
|
|
t |
|
|
|
|
t |
|
dt |
|
|
|
ial |
|||||
|
вектора |
a . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
e&a |
= |
dϕ |
e = ϕ&e , где ϕ& - угловая скорость вращения |
|||||||||||||||||
|
|
||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
||
|
Орт e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
лежит в плоскости, в которой поворачивается |
||||||||||||||||||||
|
вектор |
|
|
|
|
|
|
|
|
|
de |
|
|
||||||||
|
a , и направлен в сторону поворота. |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
§ 3. Скорость |
|
|
|
|
|
|
||||||
|
Для |
|
характеристики движения материальной точки |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
||
|
вводится векторная величина — скорость, которая |
||||||||||||||||||||
|
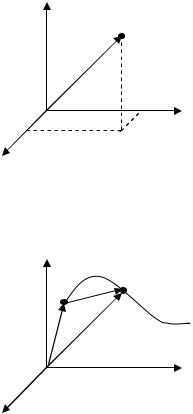
определяет как быстротуonдвижения, так и его |
||||||||||||||||||||
|
направление в данный момент времени. Пусть |
||||||||||||||||||||
|
материальная точка движется по какой-либо |
||||||||||||||||||||
|
криволинейной траекторииy |
так, что в момент времени |
|||||||||||||||||||
|
t ей соответствует радиус-вектор r0 (рис. 3). В течение |
||||||||||||||||||||
|
небольшого |
промежутка |
времени |
|
|
t |
точка |
пройдет |
|||||||||||||
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
путь s и получит элементарное перемещение r. |
|
|||||||||||||||||||
|
|
|
|
|
Величинаpanv = |
r |
|
|
|
|
|
|
|
|
|
(2.1) |
|
||||
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|||||||
|
называется средней скоростью движения за время |
t. |
|||||||||||||||||||
o |
|
|
|
v |
|
|
|
Направление |
|
средней |
|||||||||||
C |
|
|
|
|
|
|
|
|
|
|
скорости |
|
|
|
совпадает |
с |
|||||
|
|
|
|
|
|
|
sB |
|
|
|
|
|
|
||||||||
|
|
|
|
|
A |
<v> |
направлением r. |
Если |
в |
||||||||||||
|
|
|
|
|
|
|
r |
|
|
|
|
(2.1) перейти к пределу при |
|||||||||
|
|
|
|
|
|
r0 |
|
|
|
|
|
|
r |
→ |
|
0, |
то |
получим |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0
Рис. 3
выражение для мгновенной скорости v:
v = lim |
r |
= dr |
r→0 |
t |
dt |
Мгновенная скорость v есть векторная величина, |
||
равная первой производной радиуса-вектора |
||
движущейся точки по времени. Так как секущая в |
|||||||||||||||||
пределе совпадает с касательной, то вектор скорости |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
al |
v направлен по касательной к траектории tв сторону |
|||||||||||||||||
движения (рис. 3). |
|
|
|
|
|
|
|
|
|
|
n |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
По мере уменьшения |
t путь |
is все больше будет |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
de |
|
|||
приближаться к | |
r |, поэтому |
f |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
r |
|
= lim |
| |
r | |
|
s = |
ds |
|
|
||||||
|
υ =| v |= |
lim |
|
= lim |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
r→0 |
t |
|
|
on |
r→0 |
t dt |
|
|||||||
|
|
|
|
|
r→0 |
t |
|
|
|
||||||||
|
|
|
|
|
Cчисловое |
|
|
|
|
|
|||||||
Таким |
образом, |
|
|
значение мгновенной |
|||||||||||||
скорости равно первой производной пути по времени: |
|||||||||||||||||
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
||||
|
|
υ = lim |
s = ds |
|
|
|
|
|
|
|
|
|
(2.2) |
||||
|
|
r→0 |
t |
dt |
|
|
|
|
|
|
|
|
|
|
|||
Движение, при котором скорость, изменяясь как |
|||||||||||||||||
угодно по направлению, остается постоянной по |
|||||||||||||||||
|
pan |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
величине, называется равномерным и s = vt . |
|
||||||||||||||||
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В случае неравномерного движения, когда |
|||||||||||||||||
числовое значение мгновенной скорости с течением |
|||||||||||||||||
Cвремени |
изменяется, |
пользуются |
|
скалярной |
|||||||||||||
величиной <υ > – средней скоростью неравномерного движения на данном участке: