

Лекция по термеху 1
.docxТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Теоретическая механика – это наука о наиболее общих законах механического движения и механического взаимодействия физических объектов.
Законы, понятия, принципы, теоремы и формулы, которые будут получены в теоретической механике, широко применяются в различных дисциплинах, изучающих механическое движение.
Например: гидроаэродинамика, сопротивление материалов, теория упругости, теория пластичности и ползучести, теория механизмов и машин, детали машин и др.
Изучение теоретической механики – в течение двух семестров.
Второй семестра заканчивается экзаменом, а третий – зачётом.
ЛИТЕРАТУРА
ОСНОВНАЯ
-
Тарг С.М. Краткий курс теоретической механики. – М.: Высшая школа, 2002, 416с.
-
Никитин Н.Н. Курс теоретической механики. – М.: Высшая школа, 1990, 607с.
-
Яблонский А.А., Никифорова В.М. Курс теоретической механики. – СПб.: Лань, 2002, 764с.
-
Мещерский И.В. Задачи по теоретической механике. – СПб.: Лань, 2002, 448с.
-
Яблонский А.А. Сборник заданий для курсовых работ по теоретической механике. – М. Интеграл-пресс, 2002. – 384 с.
-
Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. – СПб.: Лань, 1995, 669 c.
ДОПОЛНИТЕЛЬНАЯ
-
Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. – СПб.:Лань, 2002, 729с.
-
Старжинский В.М. Теоретическая механика. – М.: Наука, 1980, 464с.
-
Яблонский А.А., Норейко С.С. Курс теории колебаний. – М.: Высшая школа, 1975, 248с.
-
Бутенин Н.В., Фуфаев Н.А. Введение в аналитическую механику. – М.: Наука, 1991, 255с.
Лекция 1
Общие понятия теоретической механики.
Кинематика точки.
Вопросы.
-
Общие понятия теоретической механики.
-
Способы задания движения точки.
-
Траектория точки и её определение.
-
Скорость точки.
-
Ускорение точки.
-
Общие понятия теоретической механики
ФИЗИЧЕСКИЕ ОБЪЕКТЫ:
материальная
точка –
тело, размерами которого можно пренебречь;
механическая система – любая совокупность материальных точек;
абсолютно твёрдое тело (твёрдое тело) – такая механическая система, расстояния между любыми двумя точками которой остаются постоянными.

МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ – изменение положения одного физического объекта относительно других, или изменение взаимного расположения частей одного физического объекта (деформация).
Из определения следует, что понятие механического движения – это понятие относительное: нужно задать «другие» физ. об-ты, относительно которых определяется изменение положения заданного.
Совокупность объектов, относительно которых определяется изменение положения заданного объекта, образует систему отсчёта.
Говорить о конкретном механическом движении можно только после задания системы отсчёта!

МЕХАНИЧЕСКОЕ ВЗАИМОДЕЙСТВИЕ – такое взаимодействие физических объектов, в результате которого происходит изменение механического движения объектов.
Количественной мерой механического взаимодействия является сила.
Вместо «тело участвует в механическом взаимодействии» на практике часто говорят: « на тело подействовала сила»
Сила на объект может действовать в течение какого-то промежутка времени, т.е. объект непрерывно участвует в механическом взаимодействии в течение этого промежутка времени.
СВЯЗЬ – любое ограничение на механическое движение объекта.
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА


КИНЕМАТИКА КИНЕТИКА


СТАТИКА ДИНАМИКА
КИНЕМАТИКА
КИНЕМАТИКА ТОЧКИ
-
Способы задания движения точки.
Задать движение точки – это значит указать правило, по которому в любой момент времени можно определить её положение в заданной системе отсчёта.
Математическое выражение этого правила называется законом движения, или уравнением движения точки.
Существует три способа задания движения точки:
векторный;
координатный;
естественный.
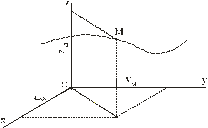
Чтобы задать движение векторным способом, нужно:
выбрать неподвижный центр;
положение точки определить с помощью
радиус-вектора
 ,
начинающегося в неподвижном центре и
заканчивающемся в движущейся точке М;
,
начинающегося в неподвижном центре и
заканчивающемся в движущейся точке М;
определить этот радиус-вектор как
функцию от времени t:
 .
.
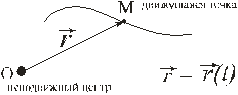
Выражение
 11\* MERGEFORMAT ()
11\* MERGEFORMAT ()
называется векторным законом движения точки, или векторным уравнением движения.
!! Радиус-вектор
– это расстояние (модуль вектора) +
направление от центра О на точку М,
которое можно определять разными
способами, например, углами с заданными
направлениями.

Чтобы задать движение координатным способом, нужно:
выбрать и зафиксировать систему координат ( любую: декартову, полярную, сферическую, цилиндрическую и проч.);
определить положение точки с помощью соответствующих координат;
задать эти координаты, как функции от времени t.
В декартовой системе координат, таким образом, надо указать функции
 22\* MERGEFORMAT ()
22\* MERGEFORMAT ()
В полярной системе координат следует определить как функции от времени полярный радиус и полярный угол:
 33\* MERGEFORMAT ()
33\* MERGEFORMAT ()
В общем, при координатном способе задания следует задавать как функции от времени те координаты, с помощью которых определяется текущее положение точки.
Чтобы можно было задавать движение точки естественным способом, нужно знать её траекторию. Запишем определение траектории точки.
Траекторией
точки называется множество
её положений за какой-либо промежуток
времени
(обычно – от 0 до +).
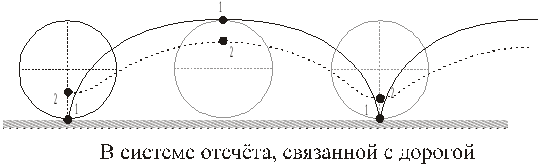
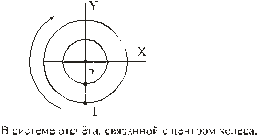
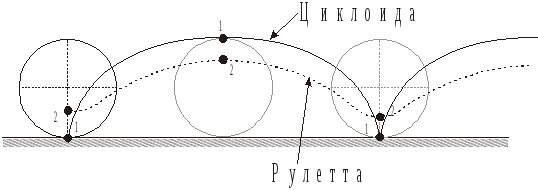
В примере с катящимся по дороге колесом траекторией точки 1 является циклоида, а точки 2 – рулетта; в системе отсчёта, связанной с центром колеса, траектории обеих точек – окружности.
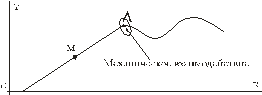
Чтобы задать движение точки естественным способом, нужно:
знать траекторию точки;
на траектории выбрать начало отсчёта и положительное направление;
определить текущее положение точки длиной дуги траектории от начала отсчёта до этого текущего положения;
указать эту длину как функцию от времени.

Выражение, определяющее указанную выше функцию,
 44\* MERGEFORMAT ()
44\* MERGEFORMAT ()
называют законом движения точки по траектории, или естественным уравнением движения точки.
В зависимости от вида функции (4) точка по траектории может двигаться различным образом.
-
Траектория точки и её определение.
Определение понятия «траектория точки» был дано ранее в вопросе 2. Рассмотрим вопрос об определении траектории точки при разных способах задания движения.
Естественный способ: траектория должна быть задана, так что находить её не надо.
Векторный способ: нужно перейти к координатному способу согласно равенствам
Координатный способ: нужно из уравнений движения (2), или (3) исключить время t.
Координатные уравнения движения задают траекторию параметрически, через параметр t (время). Для получения явного уравнения кривой надо параметр исключить из уравнений.
После исключения времени из уравнений (2) получаются два уравнения цилиндрических поверхностей, например, в виде

Пересечение этих поверхностей и будет траекторией точки.
При движении точки по плоскости задача упрощается: после исключения времени из двух уравнений
 55\* MERGEFORMAT ()
55\* MERGEFORMAT ()
уравнение траектории получится в одной из следующих форм:
 66\* MERGEFORMAT ()
66\* MERGEFORMAT ()
или
 77\* MERGEFORMAT ()
77\* MERGEFORMAT ()
или
 88\* MERGEFORMAT ()
88\* MERGEFORMAT ()
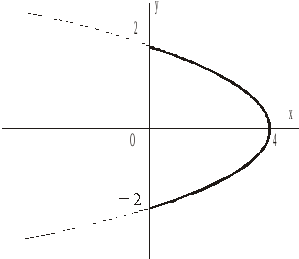
ПРИМЕРЫ.



При
 будет
будет
 ,
поэтому траекторией точки будет правая
ветвь параболы:
,
поэтому траекторией точки будет правая
ветвь параболы:



Из уравнений движения следует, что
поэтому траекторией точки будет часть параболы, расположенная в правой полуплоскости:

-
 где
где

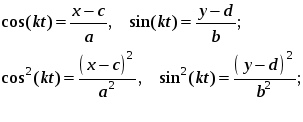
Тогда получим
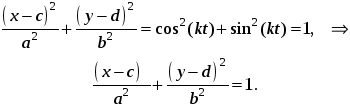
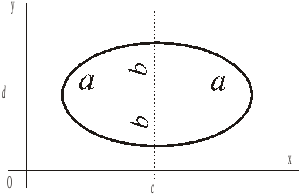
Так
как
 то весь эллипс будет траекторией точки.
то весь эллипс будет траекторией точки.
При
 центр эллипса будет в начале координат
О; при
центр эллипса будет в начале координат
О; при
 получим окружность; параметр k
на форму эллипса не влияет, от него
зависит скорость движения точки по
эллипсу. Если в уравнениях поменять
местами cos
и sin,
то траектория не изменится (тот же
эллипс), но изменится начальное положение
точки и направление движения.
получим окружность; параметр k
на форму эллипса не влияет, от него
зависит скорость движения точки по
эллипсу. Если в уравнениях поменять
местами cos
и sin,
то траектория не изменится (тот же
эллипс), но изменится начальное положение
точки и направление движения.
-
Скорость точки
Скорость точки характеризует «быстроту» изменения её положения. Формально: скорость – перемещение точки за единицу времени.
Точное определение.


Тогда
 Отношение
Отношение
 99\* MERGEFORMAT ()
99\* MERGEFORMAT ()
называется средней скоростью за промежуток времени t.
Переходя в (9) к
пределу при
 получим
получим
 1010\* MERGEFORMAT ()
1010\* MERGEFORMAT ()
получим мгновенную скорость точки, или скорость точки в данный момент, или скорость точки.
Так как

то, окончательно,
 1111\* MERGEFORMAT ()
1111\* MERGEFORMAT ()
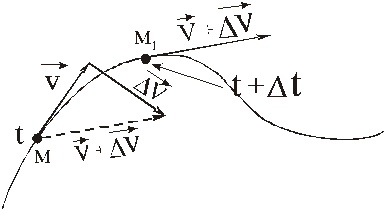
Видно,
что при
 секущая, по которой направлен вектор
секущая, по которой направлен вектор
 ,
стремится к касательной к траектории
точки. Следовательно,
,
стремится к касательной к траектории
точки. Следовательно,
вектор
скорости точки всегда направлен по
касательной к её траектории.
При координатном способе задания движения в декартовой системе координат вектор скорости определяется по проекциям на оси координат:
 1212\* MERGEFORMAT ()
1212\* MERGEFORMAT ()
Модуль (величина) скорости
 1313\* MERGEFORMAT ()
1313\* MERGEFORMAT ()
При естественном способе задания движения будет
где
 – единичный
вектор касательной, а
– единичный
вектор касательной, а

В этом равенстве
 – приращение длины дуги траектории
точки.
– приращение длины дуги траектории
точки.

Тогда, окончательно,
 1414\* MERGEFORMAT ()
1414\* MERGEFORMAT ()
Выражение
 1515\* MERGEFORMAT ()
1515\* MERGEFORMAT ()
–это проекция вектора скорости на касательную, а
 1616\* MERGEFORMAT ()
1616\* MERGEFORMAT ()
это модуль (величина) скорости.
-
Ускорение точки.
Ускорение точки характеризует «быстроту» изменения скорости точки.
Формально: ускорение – это изменение скорости за единицу времени.
 1717\* MERGEFORMAT ()
1717\* MERGEFORMAT ()
среднее
ускорение
точки за промежуток времени
 ,
а
,
а
 1818\* MERGEFORMAT ()
1818\* MERGEFORMAT ()
называется ускорением точки в данный момент времени, или мгновенным ускорением точки, или, просто, ускорением точки.
Из (18) видно, что вектор ускорения определяет изменение скорости точки как по модулю, так и по направлению.