

Историческая справка
Основоположником предмета теории автоматического управления является русский ученый и инженер И.А. Вышнеградский, который в 1867 г. опубликовал работу о регуляторах прямого действия. В этой работе он впервые доказал, что объект регулирования и регулятор являются единой системой регулирования, и поэтому процессы, проходящие в регуляторе и объекте управления, являются взаимосвязанными и должны рассматриваться вместе, т.е. системно.
![]()
где Р регулятор или автоматически управляющее устройство – устройство, осуществляющее в соответствии с алгоритмом управления воздействие на управляемый объект, а ОУ объект управления – устройство (или совокупность устройств), осуществляющее технический процесс и нуждающееся в специально организованных воздействиях извне для осуществления его алгоритма функционирования.
В это же время в том же направлении работал Максвелл. В дальнейшем выдающиеся русские ученые А.М. Ляпунов и Н.Е. Жуковский создали основы математической теории процессов, протекающих в автоматически управляемых машинах и механизмах.
Еще до н.э. арабы изобрели поплавковый регулятор.
1765г. - Ползунов изобрел паровую машину (поплавковый регулятор в котле).
1784г. - Уатт изобрел центробежный регулятор скорости в паровой машине.
Работы современного ТАУ:
А.С. Понтрягин - «принцип максимума».
Р.Беллман и Р.Каллман - «Принцип оптимальности автоматизированного управления».
Основными задачами ТАУ являются: устойчивость, управляемость, наблюдаемость, качество переходных процессов, динамическая точность, синтез и анализ систем автоматического управления, идентификация.
Взаимосвязь тау с другими техническими науками
Кибернетика наука об оптимальном управлении сложными системами (технические объекты, технологические процессы, живые организмы, коллективы, предприятия и др.). В кибернетике выделяется раздел технической кибернетики, как науки об управлении техническими объектами. В технической кибернетике выделяется теория информации – наука, занимающаяся сбором и обработкой информации, необходимой для управления техническими объектами и ТАУ.

Системой автоматического управления называют совокупность управляемого объекта и автоматического управляющего устройства (регулятора), взаимодействующих между собой в соответствии с определенным алгоритмом управления.
САУ – это такая система, в которой управляющие функции выполняются автоматически, т.е. без участия человека.
АСУ (автоматизированная система управления) это система, в которой часть управляющих функций выполняется автоматическими управляющими устройствами, а часть функций (наиболее важных и сложных) выполняется человеком.
Основные понятия и определения тау
Автоматическое регулирование это поддержание постоянной заданной величины, характеризующей состояние объекта управления или изменение этой величины по определенному заданному закону регулирования. При этом это поддержание осуществляется путем измерения управляемых величин объекта управления и выработкой управляющего воздействия на данный объект.
Автоматическое управление это автоматическое выполнение ряда функций, обеспечивающих оптимальное функционирование системы с возможностью выбора из различных вариантов функционирования. При этом данные функции выполняются по алгоритмам, достигающим цель управления.
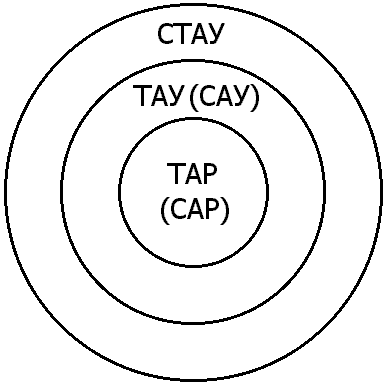
САР – система автоматического регулирования;
ТАР – теория автоматического регулирования;
САУ – система автоматического управления;
ТАУ – теория автоматического управления.