

Корнеев - ТММ. Кинематика
.pdfЮ.С. Корнеев В.Н. Коськин
Б.Г. Кобцев А.Ю. Корнеев
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН. КИНЕМАТИКА
1

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ - УЧЕБНО-НАУЧНО- ПРОИЗВОДСТВЕННЫЙ КОМПЛЕКС»
Ю.С. Корнеев, В.Н. Коськин, Б.Г. Кобцев, А.Ю. Корнеев
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН. КИНЕМАТИКА
Рекомендовано ФГБОУ ВПО «Госуниверситет - УНПК» для использования в учебном процессе в качестве учебного пособия
для высшего профессионального образования
Орел 2011
УДК 621.03 (075)
2

ББК 34.41я7 К67
Рецензенты:
доктор технических наук, профессор кафедры «Теоретическая и прикладная механика»
Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Государственный университет - учебно-научно- производственный комплекс»
А.В. Коробко,
кандидат технических наук, доцент, заведующий кафедрой «Инженерная графика и механика»
Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Орловский государственный аграрный университет»
Г.М. Абрамов
Корнеев, Ю.С.
К67 Теория механизмов и машин. Кинематика: учебное пособие для высшего профессионального образования / Ю.С. Корнеев, В.Н. Коськин, Б.Г. Кобцев, А.Ю. Корнеев. – Орел: ФГБОУ ВПО «Госуниверситет - УНПК», 2011. – 50 с.
ISBN 978-5-93932-425-0
Учебное пособие содержит общие требования к оформлению графической части и пояснительной записки курсовых проектов и работ, а также указания по содержанию и оформлению раздела ТММ «Кинематика плоских рычажных механизмов».
Предназначено студентам машиностроительных и технологических специальностей очной и очно-заочной форм обучения при оформлении и подготовке к защите курсовых проектов и работ по дисциплинам «Теория механизмов и машин», «Техническая механика», «Прикладная механика» по следующим направлениям: 190100 «Наземные транспортно-технологические комплексы», 190600 «Эксплуатация транспортно-технологических машин и комплексов», 151000 «Технологические машины и оборудование», 151900 «Конструкторскотехнологическое обеспечение машиностроительных производств», 262200 «Конструирование изделий легкой промышленности», 150700 «Машиностроение», 151600 «Прикладная механика».
УДК 621.03 (075) ББК 34.41я7
ISBN 978-5-93932-425-0 © ФГБОУ ВПО «Госуниверситет - УНПК», 2011
СОДЕРЖАНИЕ
3
Введение.................................................................................................... |
4 |
1. Порядок выполнения кинематического исследования плоского |
|
рычажного механизма.............................................................................. |
5 |
2. Кинематический анализ плоских механизмов................................... |
7 |
2.1. Задачи кинематического анализа.................................................. |
7 |
2.2. План механизма.............................................................................. |
7 |
2.3. Определение скоростей и ускорений............................................ |
8 |
2.4. Планы скоростей и ускорений .................................................... |
10 |
2.5. Кинематический анализ плоских рычажных механизмов |
|
методом планов ................................................................................... |
11 |
2.5.1. Кривошипно-ползунный механизм...................................... |
11 |
2.5.2. Шарнирный четырехзвенник................................................ |
15 |
2.5.3. Кулисный механизм............................................................... |
21 |
2.6. Метод подобия.......................................................................... |
26 |
3. Структурное и кинематическое исследование качающегося |
|
грохота-конвейера................................................................................... |
29 |
3.1. Описание схемы механизма ........................................................ |
29 |
3.2. Структурное исследование механизма....................................... |
30 |
3.3. План положений механизма........................................................ |
31 |
3.4. Кинематический анализ механизма............................................ |
33 |
3.4.1. Планы скоростей.................................................................... |
33 |
3.4.2 Угловые скорости звеньев...................................................... |
36 |
3.4.3. Планы ускорений................................................................... |
38 |
3.4.4. Угловые ускорения звеньев.................................................. |
43 |
3.5. Построение кинематических диаграмм.................................. |
44 |
3.5.1. Диаграмма перемещений ...................................................... |
44 |
3.5.2. Диаграмма скоростей............................................................. |
45 |
3.5.3. Диаграмма ускорений............................................................ |
46 |
3.5.4. Контроль точности построений............................................ |
47 |
Литература............................................................................................... |
48 |
Приложение А. Первый лист курсового проекта................................. |
49 |
4
ВВЕДЕНИЕ
Учебными планами всех специальностей при изучении дисциплин «Теория механизмов и машин», «Техническая механика» или «Прикладная механика» предусмотрено выполнение курсовых проектов или работ.
Объем выполняемых работ по проекту включает три-четыре листа графической части формата А1 и пояснительную записку на 40…60 страницах формата А4. Курсовой проект является первой самостоятельной работой студента в университете.
Цель курсового проектирования – это получение студентами навыков выполнения конструкторских работ, т.е. создания документации, необходимой для изготовления изделий машиностроения. Поэтому графическая часть курсового проекта должна оформляться в соответствии с правилами технического черчения, а пояснительная записка – согласно правилам оформления отчетов о конструкторских и научно-исследовательских работах по ГОСТ 7.32 – 81.
Вместе с тем для студента затруднительно без дополнительных разъяснений пользование стандартами и справочной литературой по техническому черчению в свете задач, решаемых при изучении вышеперечисленных дисциплин, а методическая литература по данному вопросу отсутствует. Настоящее учебное пособие предназначено для устранения этого пробела при решении задач кинематики плоских рычажных механизмов.
В пособии представлен порядок выполнения кинематического исследования плоского рычажного механизма, рассмотрен кинематический анализ кривошипно-ползунного механизма, шарнирного четырехзвенника и кулисного механизма, выполнено структурное и кинематическое исследование качающегося грохота-конвейера.
5
1.ПОРЯДОК ВЫПОЛНЕНИЯ КИНЕМАТИЧЕСКОГО ИССЛЕДОВАНИЯ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА
Исходными данными для выполнения задания № 1 в курсовом проекте являются схема механизма, его линейные размеры, а также значение угловой скорости ведущего звена. Курсовой проект состоит из графической части и расчетно-пояснительной записки.
Графическую часть курсового проекта выполняют в следующей последовательности:
1.По указанным данным и принятому масштабу длин звеньев вычертить схему механизма в восьми положениях при общем положении стойки. При этом в качестве нулевого, от которого начинается отсчет движения, принять одно из крайних положений, занимаемое ведомым (исполнительным) звеном механизма.
2.Построить для всех восьми положений механизма планы скоростей.
3.Построить четыре плана ускорений механизма (два – для рабочего хода и два – для холостого).
4.Построить диаграмму перемещений рабочего органа механизма S = S(t).
5.Графическим дифференцированием диаграммы перемещения построить диаграмму скоростей V =V (t).
6.Графическим дифференцированием диаграммы скоростей построить диаграмму ускорений W =W (t).
Графическая часть курсового проекта выполняется карандашом на листе чертежной бумаги формата А1 (размеры 841×594 мм) с соблюдением общих правил выполнения чертежей и условных обозначений
всхемах. Схемы механизмов и диаграммы выполняются сплошными линиями толщиной не менее 0,5 мм. Необходимые вспомогательные построения сохраняются. На графиках по осям координат
указываются буквенные обозначения и размерности масштабов: длин – µl (м/мм), скоростей – µV (м/c/мм); ускорений – µW (м/с2/мм).
При выборе масштабов µV и µW рекомендуется исходить из того, что модули векторов скоростей и ускорений ведущего звена механизма на планах должны быть не менее 50 мм. Над каждым графическим построением делается надпись, указывающая его наименование, чертежным шрифтом. В правом нижнем углу листа помещается штамп
ссоответствующими надписями.
6
При оформлении расчетно-пояснительной записки необходимо:
1.Привести кинематическую схему заданного механизма, его краткое описание и назначение, а также данные, необходимые для его исследования.
2.Выполнить структурный анализ механизма путем разложения структурной схемы на группы Ассура, определить класс и порядок структурных групп и механизма в целом.
3.Выбрать масштабы всех графических построений, значения масштабов указать на чертеже.
4.Записать векторные уравнения для определения скоростей и ускорений, подсчитать их численные значения. Результаты этих расчетов свести в таблицу.
5.Определить масштабы диаграмм перемещений, скоростей и ускорений.
6.Сравнить величины скоростей и ускорений, полученных для исполнительного звена на планах и кинематических диаграммах. Составить таблицу, характеризующую их процентную разницу. Величина расхождений не должна превышать 5 %.
Расчетно-пояснительная записка выполняется на отдельных листах формата А4 (210×297 мм). Оборотная сторона листа не заполняется. На листах записки оставляются поля шириной: 30 мм – слева, 10 мм – справа, 25 мм – сверху и 20 мм – снизу.
На первой странице текста в произвольном масштабе изображается схема заданного механизма, приводятся исходные данные, необходимые для его построения и исследования. Затем дается краткое описание работы механизма, всех графических построений, производятся математические расчеты, включая вычисление масштабов. Пояснения отдельных построений сопровождаются схемами. Необходимые для расчетов уравнения и формулы сначала записываются в буквенных выражениях, а затем производятся подстановка данных и соответствующие вычисления. Результаты вычислений и графических построений сводятся в таблицы. При этом обязательно указывается размерность величин.
7
2.КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ МЕХАНИЗМОВ
2.1. Задачи кинематического анализа
Кинематический анализ механизмов в общем случае предусматривает решение трех основных задач:
-определение положений звеньев и построение траекторий движения отдельных точек звеньев;
-расчет скоростей точек и угловых скоростей звеньев;
-определение ускорений точек и угловых скоростей звеньев. Кинематическое исследование схем механизмов выполняют гра-
фическими и аналитическими методами. Первым свойственны наглядность и относительная простота, однако они не дают точных результатов. Аналитические методы позволяют получить требуемую точность результатов, но отличаются большой сложностью и трудоемкостью вычислений.
2.2. План механизма
Изображение кинематической схемы механизма в выбранном масштабе, соответствующее определенному положению начального звена, называется планом механизма. План механизма должен быть построен в определенном чертежном масштабе. Под масштабом физической величины понимают отношение численного значения физической величины в свойственных ей единицах измерения к длине отрезка в миллиметрах, изображающего эту величину. Масштаб длин для плана механизма есть отношение какой-либо длины в метрах к отрезку, изображающему эту длину на чертеже в миллиметрах. Например: µl = lAB / AB . Масштаб длин имеет размерность м/мм.
Стандартными приняты следующие масштабы: 0,0001; 0,001; 0,01; 0,1; 1; 10; 100; 0,0002; 0,002; 0,02; 0,2; 2; 20; 200; 0,0005; 0,005; 0,05; 0,5; 5; 50; 500 и т. д.
При построении плана механизма вначале следует найти его крайние положения, ограничивающие траектории движения точек звеньев, совершающих возвратное движение.
8
2.3. Определение скоростей и ускорений
Для применения графических методов кинематического анализа необходимо знать основные зависимости по определению скоростей
иускорений. В механике различают поступательное, вращательное
иплоскопараллельное движение твердого тела.
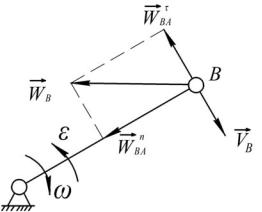
При поступательном движении звена скорости и ускорения его точек одинаковы по величине и направлению. Если звено совершает вращательное движение вокруг неподвижной оси (рис. 2.1), то линейная скорость точки B, находящейся на расстоянии lOB от оси враще-
ния, равна: VB = ω lAB и направлена перпендикулярно к звену АВ
в сторону вращения. Если угловая скорость задана в n, об/мин, то перевод в рад/с осуществляется по формуле ω = πn / 30, с-1.
Рис. 2.1. Схема для определения скорости и ускорения звена, совершающего вращательное движение
Ускорение точки В при вращательном движении звена АВ определяется геометрической суммой векторов:
W =W n +W τ ,
r r B BA BA
где WBAn и WBAτ – нормальная и тангенциальная составляющие ускоре-
ния точки B в ее относительном вращательном движении вокруг точки A:
WBAn = ω2l AB ; WBAτ = ε lAB .
Вектор нормального ускорения WBAn направлен по радиусу к центру вращения (направлен от точки B к точке A), вектор тангенциаль-
9

ного (касательного) ускорения WBAτ направлен перпендикулярно к ра-
диусу вращения (перпендикулярно к звену AB) в сторону углового ускорения ε. Направление векторов угловой скорости и углового ускорения могут совпадать (в этом случае движение – ускоренное) или не
совпадать (движение – замедленное). Модуль полного ускорения
точки В: WrB =  (WrBAn )2 +(WrBAτ )2 = lAB ε2 +ω4 .
(WrBAn )2 +(WrBAτ )2 = lAB ε2 +ω4 .
Угол отклонения вектора WB полного ускорения от линии дейст-
вия нормальной составляющей (радиуса) можно определить по формуле
tgγ =WrBAτ /WrBAn =ε /ω2 .
Если звено совершает плоскопараллельное движение и скорость точки А известна (рис. 2.2, а), то, принимая эту точку за полюс, можно найти скорость точки В:
r VB =VA +VBA ,
где VBA – вектор скорости точки B в ее относительном вращательном движении вокруг точки A; VBA = ωBAlAB , где ωBA – угловая скорость звена ВА. При этом вектор скорости VBA направлен перпендикулярно к звену ВА.
а |
б |
Рис. 2.2. Схемы для определения скорости (а) и ускорения (б) звена, совершающего плоскопараллельное движение
10