

5.5.2. Кулачковый механизм с качающимся толкателем
Исходные данные: схема кулачкового механизма (рис. 5.5); максимальный угол размаха толкателя ψmax; максимально допустимый угол давления αдоп; графики угловых перемещений (рис. 5.6), аналогов угловых скоростей и аналогов угловых ускорений.
Порядок построения (рис. 5.7):
1 .
Из произвольной точкиО2
(ось вращении качающегося толкателя)
радиусом,
равным длине толкателя L
, проводится дуга. На этой дуге выбирается
нулевая точка О
(нижнее положение центра ролика толкателя)
так, чтобы прямая, соединяющая нулевую
точку и т. О2,
располагалась под углом ±20° к горизонтали
(для удобства чтения чертежа). От нулевой
точки в cторонy удаления толкателя
откладываются углы удаления ψ1
, ψ 2
,ψ 3
и т.д., соответствующие отрезкам I-I, 2
-2, 3 -3 и т.д. графика угловых перемещений
(рис. 5.6) ψ1=
µψ
.
Из произвольной точкиО2
(ось вращении качающегося толкателя)
радиусом,
равным длине толкателя L
, проводится дуга. На этой дуге выбирается
нулевая точка О
(нижнее положение центра ролика толкателя)
так, чтобы прямая, соединяющая нулевую
точку и т. О2,
располагалась под углом ±20° к горизонтали
(для удобства чтения чертежа). От нулевой
точки в cторонy удаления толкателя
откладываются углы удаления ψ1
, ψ 2
,ψ 3
и т.д., соответствующие отрезкам I-I, 2
-2, 3 -3 и т.д. графика угловых перемещений
(рис. 5.6) ψ1=
µψ
![]()
![]() рад,
ψ
2
= µψ
рад,
ψ
2
= µψ
![]() рад и т.д. Для удобства радианы можно
перевести в градусы.
рад и т.д. Для удобства радианы можно
перевести в градусы.
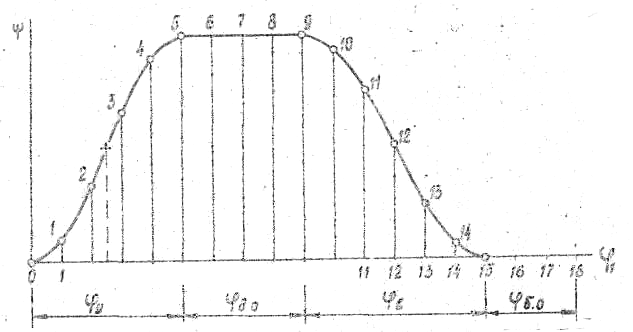
Рис. 5.6. График угловых перемещений
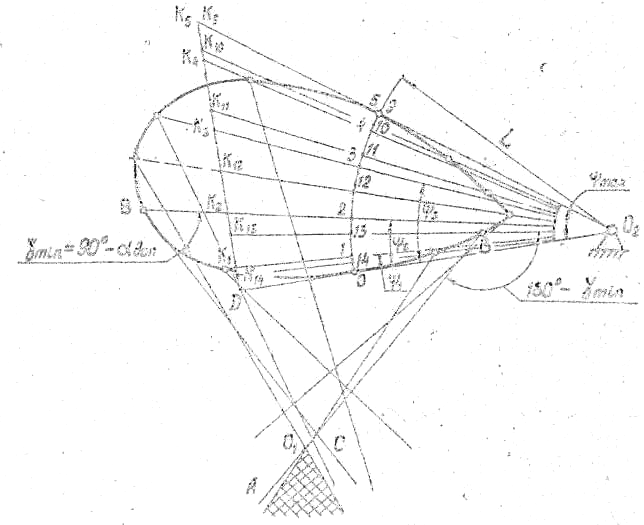
Рис. 5.7. Определение начального радиуса кулачка
|
|
ΨО=
|
Чтобы точно (до минут) отложить углы ψ1, ψ2 ,ψ3 и т. д., необходимо поступить следующим образом. На отрезке О2-О от т. О2 откладывают отрезок О2D , равный 100 мм. Из точки D восстанавливают к линии О2D перпендикуляр, на котором откладывают отрезки DK1 = О2Dtg ψ1, DK2 = О2Dtg ψ2 и т. д. Так как отрезок О2D =100 мм, то DК1 =100 tgψ1, мм; DК2=100 tgψ2, мм и т.д. Значения tgψ вычисляют из тригонометрических таблиц.
Полученные точки К1, К2, К3 и т.д. соединяют лучами с т. О2. Точки пересечения лучей с дугой радиуса L дают точки 1, 2, 3 и т.д. Так же поступают и для получения точек 9, 10, 11 и т.д. на фазе возвращения.
2. На лучах О2-1, О2 - 2, О2 - 3 и т.д. (фаза удаления) от точек 1, 2, 3 и т.д. в сторону вектора V yT (линейная скорость центра ролика на фазе удаления), повернутого на 900 в направлении угловой скорости кулачка ω1 (рис. 5.5), откладывают аналоги линейных скоростей центра ролика толкателя:
![]()
где – аналог угловой скорости толкателя – из графика (= h µ), h – ордината графика угловой скорости толкателя, мм. Масштабный коэффициент аналога линейной скорости должен быть равным масштабному коэффициенту длины L толкателя.
Чтобы определить направление, по которому необходимо откладывать (oт точек 9, 10, 11 и т.д.) аналог линейной скорости центра ролика толкателя для фазы возвращения, вектор VвТ линейной скорости центра ролика толкателя поворачивают также на 900 в направлении угловой скорости кулачка ω1. Или иначе: при разных направлениях угловых скоростей вращения кулачка (ω1) и толкателя (ω2) аналог линейной скорости центра ролика откладывают от точек дуги (точки 1, 2, 3, ..., 9, 10, 11 и т.д.) в направлении от центра О2 при одинаковых направлениях – к центру О2 [4, c. 485].
3. Концы отрезков аналогов линейных скоростей центра ролика толкателя соединяют плавной кривой. Среди точек, по которым проводится кривая, непременно должны быть точки, соответствующие экстремальным значениям аналогов скоростей на фазах удаления и возвращения. Если таких точек нет на диаграмме перемещений, их следует построить дополнительно. На рис.6 такая дополнительно построенная точка обозначена крестиком ( соответствует максимальному значению аналога скорости, например, положению 5 косинусоидального закона (см. прил. 3) и соответствующая ей дополнительная точка на рис. 5.7 также обозначена крестиком. Если указанные точки отсутствуют, возможны ошибки при определении начального радиуса кулачка, в чем можно убедиться из рис. 5.7.
4. Из точек кривой, расположенных от точки О2 за дугой радиуса L , проводят лучи ВС под минимальным углом передачи γmin = 90˚– αдоп к лучам ВО2, а из точек кривой, расположенных между точкой О2 и дугой радиуса L, – лучи ВА под углом 180˚– γmin= 90˚ + αдоп к лучам ВО2. Находят наиболее удаленную от нулевой точки (т. О) точку пересечения лучей ВС и ВА (т. О1). Ее можно принять за ось вращения кулачка. За ось вращения кулачка можно принять также любую точку в пределах заштрихованной зоны. Начальным радиусом кулачка будет расстояние от оси вращения кулачка до нулевой точки.
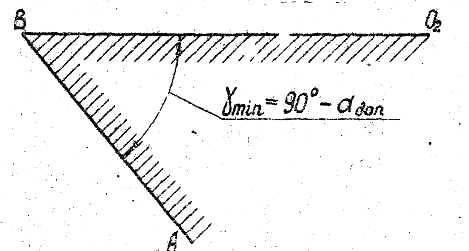
Рис. 5.8. Первый шаблон
В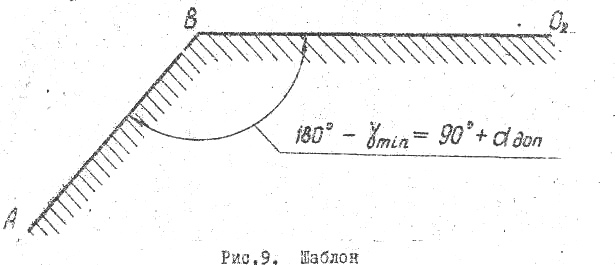 торой
шаблон (рис. 5.9) имеет угол 180˚–
γmin=
90˚ + αдоп
. Oн применяется для точек кривой,
расположенных между дугой радиуса L
и точкой О2.
торой
шаблон (рис. 5.9) имеет угол 180˚–
γmin=
90˚ + αдоп
. Oн применяется для точек кривой,
расположенных между дугой радиуса L
и точкой О2.
Рис. 5.9. Второй шаблон
При пользовании шаблонами точка В совмещается с точками кривой, прямая BO2 направляется на точку O2, а по прямым ВС и ВА шаблонов проводятся лучи. Точка O1 (рис. 5.7) пересечения двух любых лучей (ВС и ВА ), наиболее удаленная от нулевой точки, является началом заштрихованной зоны. Эта точка, а также любая другая, расположенная в заштрихованной зоне, может быть принята за ось вращения кулачка.