

5.4. Определение перемещений, скоростей и ускорений толкателя
Для кулачкового механизма с поступательно движущимся толкателем:
перемещение S = hS µS , м,
скорость V = h µ ω1, м/с,
ускорение a = ha µa ω12 , м/с2,
|
|
где hS – ордината графика перемещений, мм; h – ордината графика аналогов скоростей, мм; ha – ордината графика аналогов ускорений, мм; ω1 – угловая скорость вращения кулачка, рад/с.
Для кулачкового механизма с качающимся толкателем:
угловое перемещение ψ = hψ µψ , рад
угловая скорость ω = h µ ω1, рад/с
угловое ускорение = h µ ω12 , рад/с2 ,
где hψ – ордината графика угловых перемещений, мм; hω – ордината графика аналогов угловых скоростей, мм; h – ордината графика аналогов угловых ускорений, мм.
5.5. Определение начального радиуса кулачка
Габариты кулачкового механизма в основном определяются величиной начального радиуса кулачка. В связи с этим начальный радиус должениметь возможно меньшее значение. На величину начального радиуса существенное влияние оказывает величина допустимого yгла давления. Угол давления для каждого из положений кулачкового механизма с поступательно движущимся толкателем определяется по выражению [3, c. 168]:
|
tgα
= |
г деα
– угол давления (pис.
5.1);
деα
– угол давления (pис.
5.1);
![]() – аналог
скорости толкателя для рассматриваемого
положения механизма;
е
– эксцентриситет – pасстояние до
траектории движения толкателя от оси
вращения кулачка; S0
–
проекция на направление движения
толкателя начального радиуса, проведенного
в т. В0
касания толкателя с кулачком в начальном
(нижнем) положении, Si
–
ход толкателя для рассматриваемого
положения механизма.
– аналог
скорости толкателя для рассматриваемого
положения механизма;
е
– эксцентриситет – pасстояние до
траектории движения толкателя от оси
вращения кулачка; S0
–
проекция на направление движения
толкателя начального радиуса, проведенного
в т. В0
касания толкателя с кулачком в начальном
(нижнем) положении, Si
–
ход толкателя для рассматриваемого
положения механизма.
Эксцентриситет e и скорость толкателя V следует подставлять в выражение (1) с алгебраическими знаками. Эксцентриситет считается поло-жительным, если линейная скорость точки D кулачка (рис. 5.1) совпадает по направлению со скоростью толкателя на фазе удаления. Точка D лежит на пересечении направления движения толкателя с перпендикуляром, опущенным на это направление из центра О вращения кулачка. За положительное направление скорости принимается направление скорости толкателя на фазе удаления.
При определении начального радиуса кулачка принимаются следующие допущения: 1) не учитывается трение между толкателем и профилем кулачка; 2) звенья кулачкового механизма считаются абсолютно жесткими.
Формула (1) выведена с учетом этих допущений.
5.5.1. Кулачковый механизм с поступательно движущимся толкателем
Исходные данные: схема кулачкового механизма, графики перемещений и аналогов скоростей, допустимый угол давления αдоп.
Для кулачкового механизма с поступательно движущимся толкателем определение начального радиуса кулачка графическим способом сводится к графическому решению уравнения (I).
Порядок построения (рис. 5.2):
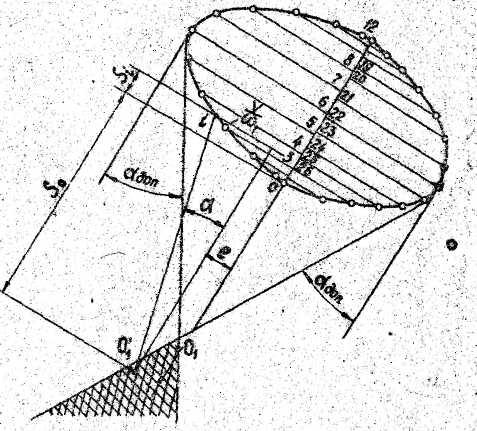
Рис. 5.2. Определение начального радиуса кулачка
1 .
Параллельно траектории движения
толкателя кулачкового механизма (рис.
5.3) проводится прямая линия.
.
Параллельно траектории движения
толкателя кулачкового механизма (рис.
5.3) проводится прямая линия.
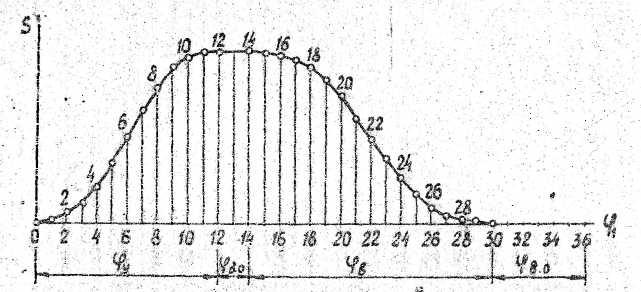
2. От произвольной точки на этой линии (нулевая точка) в направлении перемещения толкателя на фазе удаления откладываются отрезки 0 - 1, 0 - 2, 0 - 3, ..., 0 - 12 (индексы 1, 2, 9, 10, 11 на рисунке не обозначены), соответствующие отрезкам 1-1, 2-2, 3 - 3,…,12 - 12 фазы удаления графика перемещений (рис. 5.4). На фазе возвращения (тоже от нулевой точки) откладываются отрезки 0 - 14, 0 - 15, 0 - 16, ..., 0 - 29, соответствующие отрезкам 14 - 14, 15 -15, 16 - 16, ..., 29 - 29 фазы возвращения графика перемещений. Масштаб откладываемых отрезков может быть произвольным или равным масштабу графика перемещений.
3. Из точек l, 2, 3 и т.д. (рис. 5.2) перпендикулярно траектории движения толкателя в сторону векторов его скоростей Vту и Vтв (на фазах удаления и возвращения), повернутых на 90° в направления угловой скорости кулачка ω1, откладываются соответствующие отрезки аналогов скоростей V/ω1 (из графика аналогов скоростей). Масштаб этих oтрезков должен быть тем же, что и масштаб отрезков перемещения толкателя, отложенных на траектории его движения (рис. 5.2). Для этого соответствующую ординату Yv с графика аналогов скоростей необходимо умножить на масштабный коэффициент µv изображения аналогов скоростей. Получим истинную величину аналога скорости. Чтобы изобразить аналог скорости в масштабе перемещений, необходимо истинную величину аналога скорости разделить на масштабный коэффициент µS перемещений.
Таким
образом, величина изображаемого нa рис.
5.2 отрезка
![]() аналога скорости вычисляется по выражению
аналога скорости вычисляется по выражению
![]() =
=
![]()
Концы отрезков соединяются плавной кривой,
4. Касательной к полученной кривой под максимально допустимым yглом давления (αдоп ) к траектории движения толкателя проводятся лучи. Лучи проводятся таким образом, чтобы точка их пересечения (т. О1) и нулевая точка (т. О) располагались по одну сторону от кривой. Расстояние между точкой, принимаемой за ось вращения кулачка, и точкой О и будет представлять величину начального радиуса кулачка.
Если за ось вращения кулачка принять точку пересечения лучей (т. О1), получим минимально возможный начальный радиус кулачка. При этом дважды за один оборот в точках, соответствующих точкам касания с кривой на фазе удаления и фазе возвращения, угол давления будет принимать значение αдоп . Во всех остальных случаях он будет принимать значение меньше αдоп. Ось вращения кулачка можно расположить в любом месте заштрихованной зоны. В этом случае угол давления при работе кулачкового механизма всегда будет меньше допустимого.
Если задан или предварительно выбран эксцентриситет е, проводится прямая, параллельная траектории движения толкателя и отстоящая от нее на расстояние е. Любая точка этой прямой в пределах заштрихованной зоны может быть принята за ось вращения кулачка. С целью уменьшения угла давления на фазе удаления эксцентриситет на рис. 5.2 следует откладывать в сторону фазы удаления.
Из рис. 5.2 можно определить тангенс угла α:
Получили то же выражение, что и формула (1). Это свидетельствует о том, что указанные построения являются графическим способом решения уравнения (1). Начальным радиусом является расстояние между осью вращения кулачка и нижним положением толкателя (т. О) (см. также рис. 5.1 – расстояние OB0). Из рис. 5.2 следует также, что чем меньше допустимый угол давления αдоп, тем больше начальный радиус кулачка, и наоборот.
Если кулачковый механизм имеет силовое замыкание, то при ведущем кулачке и постоянном направлении его вращения заклинивание кулачкового механизма может возникнуть лишь на фазе удаления, так как кулачок преодолевает следующие силы: полезных сопротивлений, инерции толкателя и упругости пружины. На фазе же возвращения кулачок как бы уходит из-под толкателя, и толкатель не создает препятствий его вращению, а лишь поджимается к нему пружиной. Поэтому величины углов давления на фазе возвращения можно было бы не учитывать и ось вращения кулачка брать на луче, касательном к кривой на фазе удаления. Однако в процессе монтажа механизма в машине или при ремонтных работах иногда приходится поворачивать кулачок в обратном направлении. При этом фаза возвращения становится уже фазой удаления, для которой не исключена опасность заклинивания. Поэтому при выполнении курсового проекта необходимо учитывать углы давления и на фазе возвращения.
Если проектируемый кулачок предполагается монтировать на вал, а не изготавливать с ним заодно, начальный радиус кулачка по конструктивным соображениям не должен быть меньше 30–40 мм.