

3.6. Ускорение платформы и мощность двигателя. Выбор двигателя и редуктора.
Выбор мощности двигателя произведём исходя из наиболее тяжёлого для него режима работы - разгон всей системы при подъёме платформы с грузом. Для этого изобразим кинематическую схему (рис. 3), выделив в ней каждую сосредоточенную массу и заменив отброшенные части привода соответствующими внутренними силами, согласно известному принципу теоретической механики. Задавшись направлением движения, составим уравнения движения каждой выделенной массы.
Jδ

Рисунок 3.
Уравнение
движения для платформы с грузом:
Уравнение движения для противовеса:

где
w
и
wG
– линейные ускорения платформы и
противовеса – в общем случае, при разных
диаметрах грузового барабана могут
быть неодинаковыми,
 - усилие, действующее на платформу со
стороны каната,
- усилие, действующее на платформу со
стороны каната,
 - усилие, действующее на противовес со
стороны каната.
- усилие, действующее на противовес со
стороны каната.
Уравнения мощностей для каната платформы:

и канат противовеса:

где
 - усилие, действующее на канат платформы
со стороны грузового барабана,
- усилие, действующее на канат платформы
со стороны грузового барабана, - усилие, действующее на канат противовеса
со стороны грузового барабана,
- усилие, действующее на канат противовеса
со стороны грузового барабана, – радиус барабана платформы,
– радиус барабана платформы, - радиус барабана противовеса,
- радиус барабана противовеса, - угол поворота грузового барабана или,
что тоже барабана противовеса.
- угол поворота грузового барабана или,
что тоже барабана противовеса.
Ясно,
что линейные скорости тросов, барабана
и противовеса равны:

 .
.
Уравнение моментов относительно грузового барабана:

где
F
– окружная сила, действующая со стороны
червяка на червячное колесо,
 - радиус червячного колеса,
- радиус червячного колеса, - усилие, действующее на грузовой барабан
со стороны каната платформы,
- усилие, действующее на грузовой барабан
со стороны каната платформы, - усилие, действующее на грузовой барабан
со стороны каната противовеса.
- усилие, действующее на грузовой барабан
со стороны каната противовеса.
Исключая
 из уравнения (3) путём подстановки его
значения из уравнения (5), а также заменяя
из уравнения (3) путём подстановки его
значения из уравнения (5), а также заменяя ,
получим
,
получим

Исключая
 из уравнения (4) путём подстановки его
значения из уравнения (6), а также заменяя
из уравнения (4) путём подстановки его
значения из уравнения (6), а также заменяя ,
получим
,
получим

Решив
уравнения (8) и (9) относительно
 и
и , получим
, получим


Умножив (10) на R1, а (11) на R2 и сложив, получим согласно (7) пусковой момент МЧК на червячном колесе:

или,
подставляя значения
 и выносяR1
за скобки, получим
и выносяR1
за скобки, получим

где

- статически момент на валу грузового барабана,

- динамический момент на валу грузового барабана.
Принимая
в первом приближении, что
 соответствует номинальному моменту
двигателя, из условия, что пусковой
момент
соответствует номинальному моменту
двигателя, из условия, что пусковой
момент , гдеk
– коэффициента
надёжности по нагрузки двигателя,
находим
, гдеk
– коэффициента
надёжности по нагрузки двигателя,
находим

Решая данное уравнение относительно w, получим

или,
деля числитель и знаменатель на
 ,
найдём
,
найдём

Обозначив


найдём ускорение платформы:

Принимая k = 3, по формулам (13), (14) и (15) находим



Номинальная
мощность двигателя определяется
скоростью установившегося движения
платформы, величина которой в свою
очередь определяется ускорением
заданными величинами высоты и времени
подъёма. Требуемую скорость платформы
при установившемся движении находим,
полагая, что во время разгона и торможения
движение равноускоренное.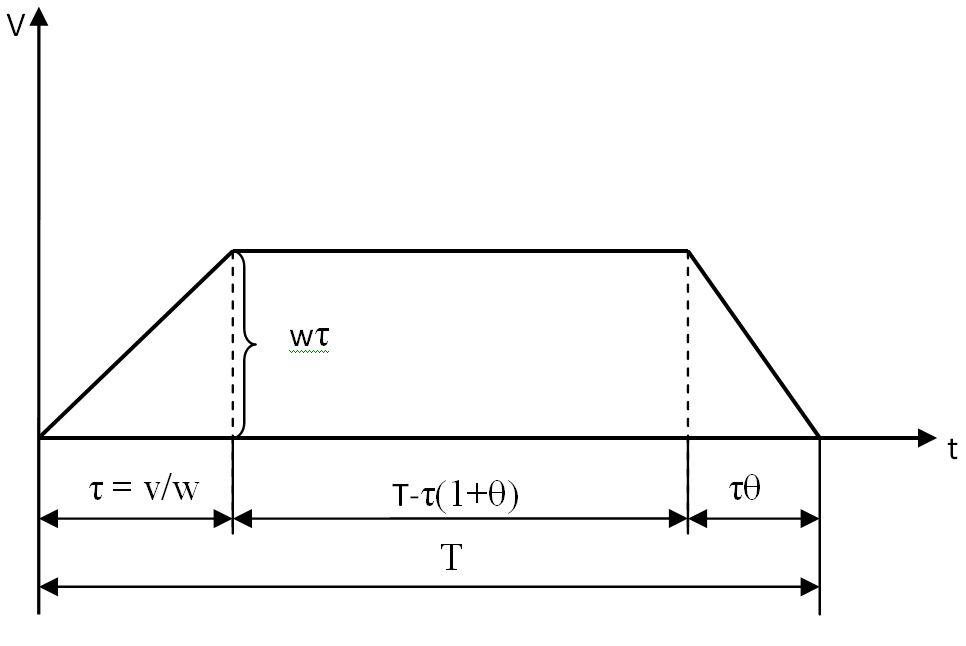
Рисунок 4. График скорости.
Из графика скорости (рис.4), в котором в общем случае принимаем, что время торможения составляет некоторую долю θ от времени разгона τ привода, видим, что путь H, пройденный платформой за время подъёма T, равен:

или

Подставляя
значение
 :
:

вынося
 из
первых двух членов и сложив с последним,
найдём
из
первых двух членов и сложив с последним,
найдём

Разделив
а
 и умножив на 2w:
и умножив на 2w:

тогда окончательно получим

Очевидно, что в полученной формуле знак «+» перед корнем физического смысла не имеет, так как время разгона не может быть больше общего времени работы привода Т.
Мощность на валу червячного колеса при установившемся режиме

Подставив
выражение
 из (12), получим
из (12), получим


Выписываем основные расчётные формулы:

Обозначив R1/ R2 через ξ и придавая ему значения, вычисляем табл.2, по которой строим график w = f(ξ) и w = f(Pчк) (рис.5). Значения ξ от 0,2 до 0,5 приводят к значительному увеличению радиуса барабана платформы, что недопустимо по конструктивным соображениям, либо к уменьшению радиуса барабана противовеса, что недопустимо по правилам котлонадзора. Значения ξ больше единицы тоже не следует брать, так как при этом уменьшается значение ускорения, что вызывает увеличение мощности электродвигателя.
Таблица 2.
|
ξ |
|
|
|
|
|
|
|
0,5 |
2,44 |
0,61 |
0,39 |
0,62 |
0,38 |
0,120 |
|
0,6 |
2,31 |
0,65 |
0,35 |
0,59 |
0,41 |
0,123 |
|
0,7 |
2,18 |
0,69 |
0,31 |
0,56 |
0,44 |
0,125 |
|
0,8 |
2,08 |
0,7 |
0,28 |
0,53 |
0,47 |
0,128 |
|
0,9 |
1,98 |
0,76 |
0,24 |
0,49 |
0,51 |
0,131 |
|
1,0 |
1,89 |
0,79 |
0,20 |
0,45 |
0,55 |
0,134 |







Рисунок 5.
Из графика (рис.5) w = f(ξ) выбираем такое ξ (в интервале от 0,5 до 1), чтобы получить значение R1 оканчивающимся на 0 или 5.
Принимая ξ = 0,6, находим R1:

Из графика w=f(Рчк) для принятого ξ = 0,75 находим значение Рчк = 127 Вт. Приняв ориентировочное значение КПД червячного редуктора η = 0,8, по величинам



выбираем из онлайн каталога http://www.maxonmotor.com/maxon/view/catalog/ Planetary Gearhead GP 42 C Ø42 mm, 3 - 15 Nm, Ceramic Version (203119) со следующими данными:
Таблица 3. Технические характеристики редуктора
|
Передаточное отношение |
26 : 1 |
|
Максимальный продолжительный момент |
7,5 Nm |
|
Кратковременный момент |
11,3 Nm |
|
КПД |
81 % |
|
Номинальная мощность |
240 W |
|
Максимальная кратковременная мощность |
360 W |
|
Рекомендуемая входная скорость |
8000 rpm |
Корректируем радиус барабана исходя из условия


Подбираем двигатель по условиям


Исходя из выше приведённых условий, в онлайн каталоге Maxon motor
(http://www.maxonmotor.com/maxon/view/catalog/)выбираемEC 45 Ø45 mm, brushless, 250 Watt, with Hall sensors (136210), который имеет следующие характеристики:
Таблица 4.Технические характеристики двигателя
|
Номинальная мощность (Pн) |
250 W |
|
Ток при номинальной нагрузке (Iн) |
12,5 A |
|
Пусковой
ток
|
167 A |
|
Номинальное напряжение (Uн) |
24 V |
|
Номинальное число оборотов (nн) |
7970 rpm |
|
КПД (η н) |
86 % |
|
Номинальный момент (Mн) |
311 mNm |
|
Пусковой
момент
|
4400 mNm |
|
Маховой момент (GD2) |
209 gcm² |


Вес противовеса найдем из условия

