

Балтийский государственный технический университет
«ВОЕНМЕХ» им. Д. Ф. Устинова
Кафедра Н1: Мехатроника и робототехника

КУРСОВОЙ ПРОЕКТ
На тему: Расчет электропривода подъемного звена манипулятора
Выполнил: Евстифеев А. С.
Группа: Н101
Проверил: Савельев Б.Н.
Санкт-Петербург
2013
Оглавление
1.Техническое задание 3
2. Кинематическая схема электропривода. 4
3. Проектировочный расчёт подъёмника. 4
3.1. Выбор диаметра каната. 4
3.2. Определение размеров блоков и барабанов. 5
3.3. Определение диаметра оси блока. 5
3.4. Определение КПД блока. 6
3.5. Связь веса противовеса и диаметров грузового барабана. 7
3.6. Ускорение платформы и мощность двигателя. Выбор двигателя и редуктора. 9
4.Проверочный расчет подъемника. 16
4.1.Расчет пусковых резисторов и построение пусковой диаграммы. 16
4.2.Вывод уравнения движения подъемника. 18
4.3. Числовой расчет. 21
1.Техническое задание
Рассчитать и спроектировать электропривод подъёмника для поднятия груза весом Qг на высоту H за время T с последующим опусканием ненагруженного подъёмника весом Qп . Горизонтальные перемещения подъёмника предотвращаются трением о направляющие. Привод осуществляется тросовой передачей, в которой применены три направляющих блока с углом обхвата 90ᵒ; напряжение питающей сети – 220 В постоянного тока; условия эксплуатации обычные – подъёмник монтируется в сухом закрытом помещении, где температура не превышает +308 К.
Таблица 1.Техническое задание
|
Вар. № Вел |
Qг |
Qп |
H |
T |
|
ΔT |
Тип редуктора |
Питание |
|
Размерность |
Н |
Н |
м |
с |
м/с2 |
с |
|
|
|
4 |
125 |
350 |
3,6 |
3,1 |
3,3 |
0,2 |
П |
Постоянный ток 220 В |

2. Кинематическая схема электропривода.
Основой для проектировочного расчёта является кинематическая схема привода, которая выбирается исходя из технического задания.
Привод
осуществляется электродвигателем
постоянного тока и тросовой передачей.
Для разгрузки двигателя, очевидно,
целесообразно применить противовес G.
Таким образом, мы приходим к кинематической
схеме, изображённой на рисунке 1.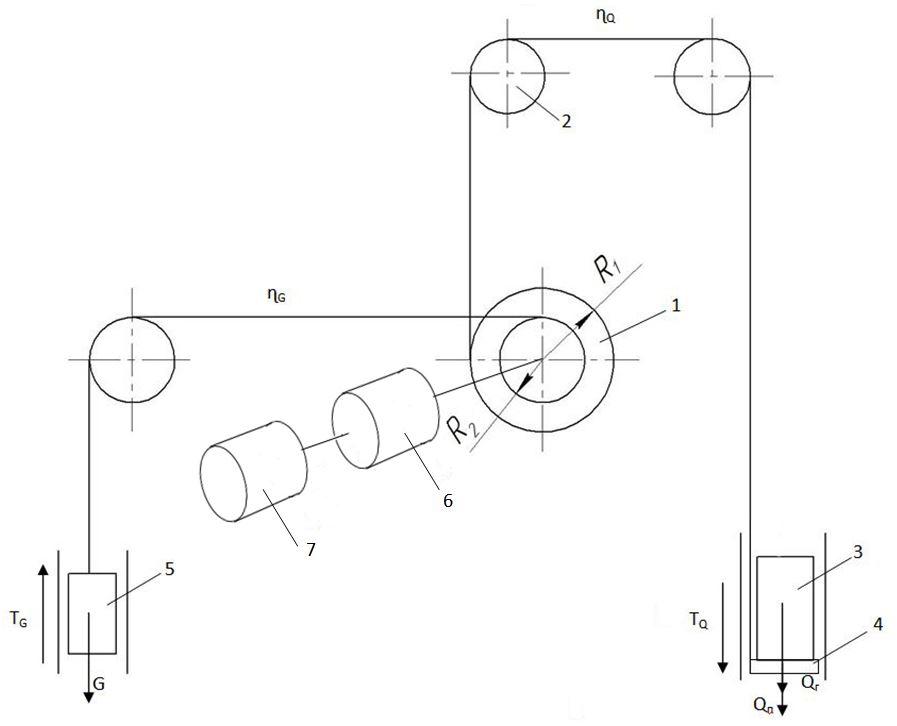
Рисунок 1. Кинематическая схема(1 - барабан; 2 - Направляющий блок; 3 - Груз;
4 - Платформа; 5 – противовес; 6 – редуктор; 7 - электродвигатель).
3. Проектировочный расчёт подъёмника.
3.1. Выбор диаметра каната.
По нормам котлонадзора, размер каната определяется следующим условием:

где Qmax – наибольшее допускаемое растягивающее усилие, S0 – разрывающие усилие каната в целом, принимаемое по данным ГОСТа 3062-80. Кд – наименьшее допускаемое значение коэффициента запаса прочности. Для грузовых подъёмников принимается Кд = 9[1], стр. 7. Величина расчётного усилия Qmax должна быть несколько больше или равна заданному усилию.
Принимая Кд = 9 и по ГОСТ 3062-80 разрывное усилие каната S0 = 5150 Н при расчётном пределе прочности проволоки при растяжении, равном 160 кгс/мм2, находим наибольшее допускаемое растягивающее усилие:

где 475 Н – суммарное усилие подъёма платформы с грузом. Q = Qп+ Qг = 350 + 125 = 475(Н)
По ГОСТ 3062-80 принятой разрывной силе соответствует диаметр каната δ = 2,4 мм. Принимаем канат 2,4-Г-ВК-Н-Т-1570 ГОСТ 3062-80
3.2. Определение размеров блоков и барабанов.
По действующим нормам котлонадзора, наименьший допускаемый диаметр барабана или блока определяется по формуле

где D- диаметр барабана или блока, измеряемый по дну ручья, мм, e – коэффициент, зависящий от типа подъёмной машины и режима её работы.
Для всех типов грузоподъёмных машин, за исключением стреловых кранов, электроталей и лебёдок, при умеренном режиме нагружения е = 25, δ – диаметр каната.
Принимая e = 45, находим диаметр блока:

Принимаем диаметр блока D = 60 мм и наименьший диаметр грузового барабана
D2 = 2R2 =60 мм.