

Лабораторная работа № 1
Моделирование нелинейной нестационарной модели средствами SciLab
Цель работы – построение и исследование математической модели нелинейной нестационарной системы.
Постановка задачи
Рассмотрим нелинейную нестационарную систему дифференциальных уравнений (1.1).
|
|
(1.1) |
|
|
|
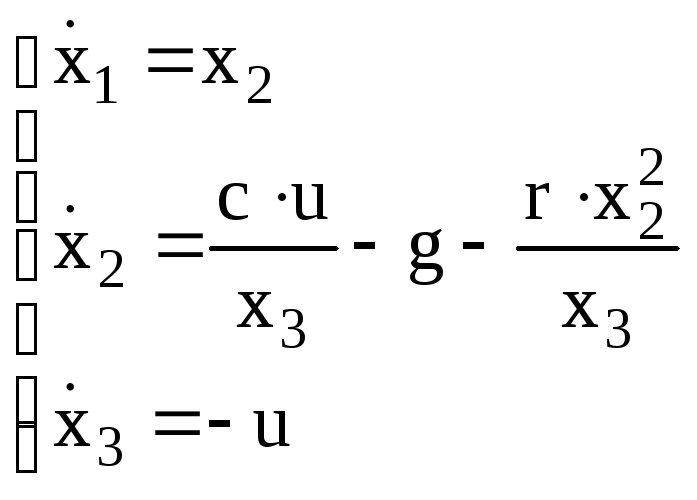 ;
;
Система (1.1) является
нестационарной поскольку имеет параметр
–![]() ,
изменяющейся во времени и зависящий от
переменной состояния
,
изменяющейся во времени и зависящий от
переменной состояния![]() .
Физической интерпретацией данной
системы может являться полет ракетоносителя
в атмосфере. В таком случае переменная
.
Физической интерпретацией данной
системы может являться полет ракетоносителя
в атмосфере. В таком случае переменная![]() описывает массу ЛА изменяющуюся в
следствии выгорания топлива,
описывает массу ЛА изменяющуюся в
следствии выгорания топлива,![]() –
описывает вертикальную составляющую
скорости,
–
описывает вертикальную составляющую
скорости,![]() –
высота полета, а нестационарный параметр
–
высота полета, а нестационарный параметр![]() – описывает плотность атмосферы
зависящую от высоты полета.
– описывает плотность атмосферы
зависящую от высоты полета.
2. Порядок выполнения работы
Реализовать в системе SciLab модель нестационарной системы и получить решение при заданных начальных условиях и параметрах, определяемых вариантом (табл.1.).
Рассчитать процесс до
 .
.Проанализировать зависимость точности и трудоемкости от шага вычислений.
Выбрать шаг при заданной точности определения
 –
– .
.
3. Содержание отчета
Уравнения описывающие математическую модель нестационарной системы.
Начальные условия и параметры системы соответствующие варианту.
Решение системы в виде графических зависимостей
 ,
, ,
, .
.График зависимости относительной погрешности вычислений от шага вычислений –
 .
.Текст программы на языке SciLab.
4. Условия моделирования
Начальные
условия –
![]() ,
,![]() .
.
Метод численного решения – Кунге-Кутта 4-го порядка.
Шаг вычислений – не более 0.1 с.
![]() .
.
Табл.1.
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
1000 |
800 |
1000 |
1200 |
1200 |
800 |
600 |
|
|
5000 |
4000 |
8000 |
4000 |
7000 |
4000 |
9000 |
|
|
25 |
20 |
20 |
40 |
20 |
20 |
10 |
Лабораторная работа № 2
Построение имитационной модели нелинейной нестационарной системы средствами Scicos
Цель работы – построение и исследование имитационной нелинейной нестационарной системы.
Рассмотренная в лабораторной работе №1 нелинейная нестационарная система дифференциальных уравнений, может быть преобразована к структурному виду (Рис 1.).
|
|
|
Рис.1 – Структурная схема нелинейной нестационарной системы |
2. Порядок выполнения работы
Реализовать в системе SciCos модель нестационарной системы и получить решение при заданных начальных условиях и параметрах, определяемых вариантом (табл.2.).
Рассчитать процесс до
 .
.Проанализировать зависимость точности и трудоемкости от шага вычислений.
Сравнить полученные результаты с результатами лабораторной работы №1.
3. Содержание отчета
Структурная схему нестационарной системы, выполненная в системе SciCos.
Начальные условия и параметры системы соответствующие варианту.
Решение системы в виде графических зависимостей
 ,
, ,
, .
.График зависимости относительной погрешности вычислений от шага вычислений –
 .
.
4. Условия моделирования
Начальные
условия –
![]() ,
,![]() .
.
Метод численного решения – Кунге-Кутта 4-го порядка.
Шаг вычислений – не более 0.1 с.
![]() .
.
Табл.2.
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
1000 |
800 |
1000 |
1200 |
1200 |
800 |
600 |
|
|
5000 |
4000 |
8000 |
4000 |
7000 |
4000 |
9000 |
|
|
25 |
20 |
20 |
40 |
20 |
20 |
10 |
Лабораторная работа № 3
Имитационное моделирование детерминированного конечного автомата.
Цель работы – построение исследование модели детерминированного конечного автомата.
1. Постановка задачи
Теория автоматов получила свое первоначальное развитие в тесной связи с разработкой логических схем цифровой вычислительной техники. Для ее применения при построении моделей систем управления целесообразно уточнить смысл некоторых терминов.
Рассмотрим простейшие и наиболее широко используемые виды конечных автоматов.
Автомат Мили (автомат I рода) имеет функции переходов и выходов следующего вида:
|
|
(3.1) |
|
|
|
где n=0,1,2,... - номер такта. Таким образом, в автомате Мили новое состояние и выходной сигнал выбираются в зависимости от сочетаний текущего состояния и входного сигнала.
У автомата Мура (автомата II рода) функции переходов и выходов имеют вид:
|
|
(3.2) |
|
|
|
Таким образом, здесь новое состояние определяется аналогично автомату Мили, а выходной сигнал зависит только от текущего состояния автомата. Способы задания автомата Мура также рассмотрим на примере.
В автономном автомате отсутствуют входные сигналы:
|
|
(3.3) |
|
|
|
Следует отметить, что в любом конечном автономном автомате состояния и выходные сигналы неизбежно начнут периодически повторяться, начиная с некоторого такта. Длина такого периода не превышает количества состояний автомата, а начальное состояние влияет только на номер такта, начиная с которого наступает периодический процесс.
Автомат без памяти обеспечивает однозначное отображение входного алфавита X в выходной Y :
 ;
;(3.4)
В автомате без выхода отсутствуют выходные сигналы:
|
|
(3.5) |