Тарихқа шолу. Манипуляторлар
Бірінші манипулятор АҚШ-тың Аргонндық ұлттық лабораториясында жасалынды. Адамның қолы сияқты әрекет жасай алатындай көпмақсатты машина құрастырылды. Машина жұмысының қағидасы оның атауын анықтады, қазақ тіліне дәл аударсақ: «қожайын-құл» (хозяин-раб). Манипулятор қауіпті аймақта орналасқан атқарушы механикалық қол («құл»), және қауіпті емес аймақта отырған оператор әрекет ететін тапсырушы механикалық қолдан («қожайын») тұрады. Ұстап қалатын құрылғысы бар тапсырушы қолдан атқарушы қолдың айырмашылығы, ода топсалы конструкциясы бар, ал оның буындарының саны және сәйкесінше еркіндік дәрежелері манипуляция объектісін кез-келген түрмен жұмыс кеңістігінде орнатуға және бағдарлауға (ориентация) жеткілікті болатын еді.
Келешекте келесі жетектерді енгізу арқылы операторды физикалық күштен босату шаралары қолданылды, дегенмен жүйенің сапасы нашарлап кетті: операторға жүктемелермен қоса атқарушы қолдың манипуляция объектілерімен әрек ететін күштер жөнінде толығымен қажетті ақпарат және морт объектілерді манипуляциялау сияқты «жіңішке» жұмыстарды орындау мүмкіндіктері жоғалады.
Әрине, өзінің мүмкіндіктері және жан-жақтылығы бойынша адамның қолы механикалық қолмен ешқандай салыстыруға келмейді. Бір кездері адам қолының мүмкіндіктеріне теңесетін механизмді құрастыру күмәнді. Антропологтардың мәліметтері бойынша, адамның қолында 27 еркіндік дәрежесі бар, ал сол уақытта объектілерді бос кеңістікте кез-келген орналастыру және бағдарлау үшін не бары 6 еркіндік дәрежесі бар механизмдер болғаны жеткілікті. Ереже бойынша, ең жетілген манипуляторларды осындай еркіндік дәрежесімен шығарады. Осындай аз қозғалмалылық кезінде де қолдың құрылысы күрделі болып шығады (1.1 сурет), ал оның шығаруы жөнінде көп сұрақтар маңызды теориялық дәлелдемелерді қажет етеді.
Өткен ғасырдың соңғы жылдарында үйлестірілген манипуляторлар кең таралды (1.2 сурет). Бұл машина жасаудың әртүрлі салаларындағы күрделі жұмыстарды механикаландыру үшін, әсіресе, станоктарда және басқа қондырғыларда ауыр дайындамалар мен бұйымдарды (ондаған немесе жүздеген килограммды салмағы бар) өңдеген кезде, және оларды тиеу және түсіру (загрузка и выгрузка) үшін, сонымен қатар құрастыру операцияларын механикаландыру үшін қолданылатын қолменен басқарылатын қарапайым манипуляциялық жүйелер болып табылады.

1.2 сурет. Жүк көтерімділігі 75 кг HB-75A (Жапония) стационарлы теңдестірілген манипуляторы
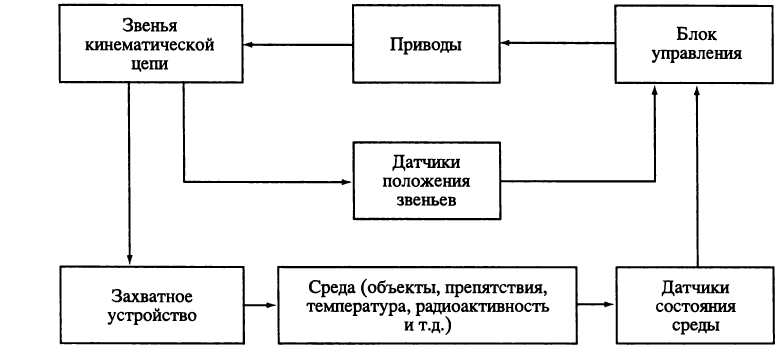
Өнеркәсіптік роботтың құрылымы және оның басты элементтері
Роботтың қарапайымдалған блок-кескіні және оның инфра-құрылымы 1.3-суретте келтірілген. Кинематикалық тізбек арқылы басқару блогының (әдетте программдық басқарудың жүйесінің) командалары бойынша жетектер робот қолының «қаңқа» (скелет) буындарының элементтерінің орнын ауыстырады. Қол қаңқасының буындарының параметрлері мен олардың бір-бірімен кинематикалық байланыстары өнеркәсіптік робот пен технологиялық жабдықтар келісімінің ерекшеліктеріне бойынша жетектер робот қолының «қаңқа» (скелет) буындарының элементтерінің орнын ауыстырады. Қол қаңқасының буындарының параметрлері мен олардың бір-бірімен кинематикалық байланыстары өнеркәсіптік робот пен технологиялық жабдықтар келісімінің ерекшеліктеріне сүйене отырып, оларды орнату көлем және робот жұмыс кеңістігінің кескін үйлесімін анықтайды.